1.本发明涉及船舶避碰安全技术领域,具体而言,尤其涉及一种性能受限的船舶避碰路径规划方法。
背景技术:
2.船舶智能决策和船舶避碰路径规划是实现船舶自主航行的重要组成部分。国际海上避碰规则(international regulations for preventing collision at sea,colregs)规定了船舶会遇时的避让责任,在此规则的基础上,船舶避碰路径规划需要考虑实际的会遇情况和船舶运动状态。
3.目前,应用于船舶避碰路径规划的方法主要有两类,精确求解方法和启发式优化方法。在采用精确求解方法规划船舶避碰路径时,大多在栅格地图的基础之上规划。yukito iijima等研究了船舶避碰控制系统,采用宽度优先搜索算法逐次逼近规划船舶避碰路径,避碰路径评价标准包括路径转向角度、路径距离、是否满足避碰规则。ki
‑
yin chang等将海图栅格化,应用迷宫布线算法求解船舶避碰路径,进行了仿真实验,可以规划安全的船舶避碰路径。michael blaich等将a*算法应用于船舶避碰路径规划,与迷宫布线算法相比,该算法可以有效提高船舶避碰路径的规划效率。启发式优化算法以仿自然体算法为主。程细得等提出了内河狭窄弯曲航道的船舶避碰路径规划方法,分别应用遗传算法和遗传模拟退火算法规划避碰路径。针对开放水域的船舶避碰问题,ming
‑
cheng tsou等提出利用遗传算法和蚁群优化算法规划最优避碰路径,考虑了船舶安全领域问题,以直航阶段的航行时间、避碰转向角度、避碰阶段的航行时间和复航转向角度为遗传子。同样针对开放水域的船舶避碰问题,倪生科等提出结合非线性规划和多种群遗传算法,规划船舶避碰路径,提高路径规划的效率。
4.实际上,船舶的质量和转动惯量都很大,船舶操纵性对船舶避碰转向运动具有重要影响。其中,船舶变向性能(船舶改变航向的能力)是船舶操纵性的重要部分,是影响船舶避碰运动的主要性能。船舶变向性能包括船舶旋回性、初始回转性和艏摇抑制性。在以上船舶避碰路径规划的研究中,船舶被视为含有船舶安全领域的质点,缺少对船舶操纵性能的考虑,导致规划路径与船舶实际运动路径相差很大,因此不能保证船舶的避碰和航行安全。
技术实现要素:
5.根据上述提出船舶避碰路径规划的船舶操纵性问题,本发明提出了一种性能受限的船舶避碰路径规划方法,考虑了船舶操作性和运动特征对船舶转向的影响,以船舶运动数学模型模拟船舶转向运动,构建了性能受限的船舶避碰路径,可以有效规划符合船舶运动特征的避碰路径。
6.本发明采用的技术手段如下:
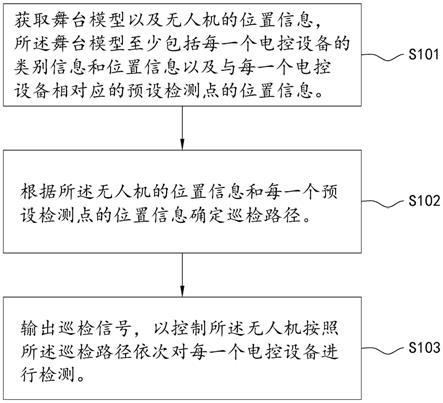
7.一种性能受限的船舶避碰路径规划方法,包括如下步骤:
8.s1、利用船舶助航设备获取本船与目标船的船舶数据;
9.s2、评估船舶安全性,判断本船与目标船是否存在碰撞危险;
10.s3、结合船舶避让行为,利用船舶运动数学模型构建性能受限的船舶避碰路径;
11.s4、应用基于生物迁移启发式算法优化船舶避碰路径;
12.s5、输出航程最短的性能受限的安全船舶避碰路径。
13.进一步地,所述步骤s1的具体实现过程如下:
14.s11、获取本船的船舶数据,利用gps获取本船经纬度,利用船舶罗经获取本船航向,利用计程仪获取本船航速;
15.s12、获取目标船的船舶数据,利用ais获取目标船的经纬度、目标船的航速、目标船的航向,利用雷达获取目标船的方位和距离;
16.s13、获取两船的最近会遇距离dcpa和最近会遇时间tcpa,根据s11和s12获取的本船和目标船的数据,利用自动雷达标绘仪arpa求解获取本船和目标船的最近会遇距离dcpa和最近会遇时间tcpa。
17.进一步地,所述步骤s2的具体实现过程如下:
18.s21、设置船舶安全会遇距离θ
safe
,安全会遇时间γ
safe
,设定船舶安全会遇距离θ
safe
为船舶安全领域的半径,取值范围为1海里~2海里,安全会遇时间γ
safe
的取值范围为20~40分钟;
19.s22、基于步骤s13中获取的本船与目标船的最近会遇距离dcpa和最近会遇时间tcpa,当在最近会遇距离dcpa小于安全会遇距离θ
safe
且最近会遇时间tcpa小于安全会遇时间γ
safe
时,认为两船存在碰撞危险。
20.进一步地,所述步骤s3的具体实现过程如下:
21.s31、根据国际海上避碰规则,确定船舶避让行为;
22.s32、结合船舶避碰行为,构建性能受限的船舶避碰运动过程;
23.s33、构建性能受限的船舶避碰路径p
i
={a1,a2,d1,d2,r1,r2,r3},其中:
24.a1:船舶避碰转向角度,代表船舶避让转向的幅度,取值范围为21~80度;
25.a2:船舶复航转向角度,代表船舶复航转向的幅度,取值范围为21~80度;
26.d1:船舶避让点距离,代表避让转向的时机,取值范围为0.1海里~6.0海里;
27.d2:船舶复航点距离,代表船舶复航转向的时机,取值范围为0.1海里~6.0海里;
28.r1:船舶避让转向舵角,代表船舶操纵性能限制,取值范围为5度~35度;
29.r2:船舶返航转向舵角,代表船舶操纵性能限制,取值范围为5度~35度;
30.r3:船舶复航转向舵角,代表船舶操纵性能限制,取值范围为5度~35度;
31.将三个转向舵角作为船舶运动数学模型的输入,模拟船舶的避碰航行过程的三次转向运动阶段,以达到规划避碰路径符合船舶运动特征的目的。
32.进一步地,所述步骤s31根据国际海上避碰规则,确定船舶避让行为,具体包括:
33.s311、根据步骤s2确定的本船与目标船存在碰撞危险后,根据国际海上避碰规则判定船舶会遇态势;船舶会遇态势包括对遇态势、追越态势和交叉相遇态势;
34.s312、根据不同的会遇态势确定本船与目标船的避让责任和避让行为,其中,交叉相遇态势,采取向右转向的避让行为;对遇态势,采取向右转向的避让行为;追越态势,采取向右转向的避让行为。
35.进一步地,所述步骤s32结合船舶避碰行为,构建性能受限的船舶避碰运动过程,
具体包括:
36.s321、构建船舶避让过程,船舶避让过程是指确认本船与目标船存在碰撞危险后,采取避让行为直至让清目标船或驶过目标船,该过程包括船舶等待直航阶段g0、船舶避让转向阶段g1和船舶避让直航阶段g2;
37.s322、构建船舶复航过程,船舶复航过程是指驶过目标船之后,本船返航回到原航线原航向的过程,包括船舶返航转向阶段g3、船舶返航直航阶段g4和船舶复航转向阶段g5;
38.其中,g1、g3和g5三个转向运动阶段要考虑船舶的转向性能,用船舶运动数学模型模拟船舶的三个转向运动阶段,构建性能受限的船舶避碰运动过程。
39.进一步地,所述步骤s4的具体实现过程如下:
40.s41、用二进制编码方式表示船舶避碰路径p={a1,a2,d1,d2,r1,r2,r3},确定七个路径变量的取值范围,利用二进制编码方式表示以上七个路径变量,组合起来表示性能受限的船舶避碰路径,生物迁移启发式算法中的栖息地代表船舶避碰路径,最高适宜度的栖息地就是航程最短的性能受限的船舶安全避碰路径;
41.s42、利用船舶运动数学模型模拟船舶转向运动阶段,考虑到船舶的操纵性和运动特征,采用船舶运动数学模型模拟船舶的避碰时的转向运动阶段,即步骤s32中的g1、g3和g5三个转向运动阶段;船舶转向时的转向舵角作为船舶运动数学模型的输入,模拟船舶的避碰时的转向运动阶段,得到船舶转向的运动轨迹;
42.s43、计算适应度,评价船舶避碰路径;在保证船舶安全的条件下,求解航程最短的船舶避碰路径;
43.船舶避碰路径规划的目标函数s为船舶避碰路径的航程,即步骤s33所述六个阶段的航程之和,采用如下表示:
[0044][0045]
船舶避碰路径规划的安全约束为两船的最近距离θ
min
大于设定的船舶安全会遇距离θ
safe
,采用如下公式表示:
[0046]
θ
min
>θ
safe
[0047]
适应度函数f与船舶避碰路径的航程s与安全系数δ有关,采用如下公式表示:
[0048]
f=δ*(s
oc
/s)
[0049]
其中,s
oc
是船舶避碰路径的最小航程,即本船初始位置点o和航线交叉点c的直线距离;满足安全约束时,安全系数δ等于1;不满足安全约束时,安全系数δ等于0;
[0050]
a1,a2的取值约束为21度~80度,采用如下公式表示:
[0051]
21≤a
i
≤80,i∈{1,2}
[0052]
d1,d2的取值约束为0.1海里~6.0海里,采用如下公式表示:
[0053]
0.1≤d
j
≤6.0,j∈{1,2}
[0054]
r1、r2和r3的取值约束为5度~35度,采用如下公式表示:
[0055]
5≤r
k
≤35,k∈{1,2,3};
[0056]
s44、评判当前的船舶避碰路径是否达到收敛标准;收敛标准可设置为最大迭代次数,也可设置为多次迭代船舶避碰路径不再优化,若达到收敛标准,则输出当代最优船舶避碰路径p={a1,a2,d1,d2,r1,r2,r3};
[0057]
s45、应用生物迁移启发式算法的迁移策略,更新船舶避碰路径。
[0058]
进一步地,所述步骤s45中,应用生物迁移启发式算法的迁移策略,更新船舶避碰路径的具体过程如下:
[0059]
s451、将船舶避碰路径作为栖息地,二进制编码的船舶避碰路径的每一位二进制码作为物种,模拟物种在各栖息地之间的迁移过程,寻找最优适宜度的栖息地,即航程最短的船舶安全避碰路径;
[0060]
s452、将所有船舶避碰路径按照适应度由小到大排序,r
k
是排序位置,n是避碰路径的个数;船舶避碰路径的迁移率与其适应度有关,船舶避碰路径适应度越大,迁出率越高,迁入率越低;
[0061]
s453、生成0~1的随机数,对二进制编码的船舶避碰路径逐位判定是否执行迁入操作,随机数大于迁入率,则执行迁入操作;
[0062]
s454、将迁出率μ
k
采用如下公式表示:
[0063]
μ
k
=1/2(1
‑
cos(πr
k
/n))
[0064]
s455、将迁入率λ
k
采用如下公式表示:
[0065]
λ
k
=1
‑
μ
k
[0066]
s456、被迁入的二进制位从其他船舶避碰路径中选择,利用轮盘赌选择方法选择船舶避碰路径,第j个船舶避碰路径p
j
的被选概率pr(p
j
)公式如下:
[0067][0068]
其中,u
j
是第j个船舶避碰路径的迁出率;
[0069]
s457、选中被迁入船舶避碰路径后,对应的二进制位迁入当前船舶船舶避碰路径,替换原来的二进制位,完成一次迁移操作;
[0070]
s458、更新船舶避碰路径后,执行步骤s43,直至收敛,输出航程最短的船舶安全避碰路径。
[0071]
较现有技术相比,本发明具有以下优点:
[0072]
1、本发明提供的性能受限的船舶避碰路径规划方法,考虑到船舶运动受到船舶操纵性的约束,规划的船舶避碰路径符合实际的船舶转向运动特征,有利于船舶避碰航行的安全性。
[0073]
2、本发明提供的性能受限的船舶避碰路径规划方法,在规划船舶避碰路径时,考虑了船舶的操纵性能,以船舶运动数学模型模拟船舶的转向运动过程,考虑了船舶舵角对船舶转向运动的影响,构建了性能受限的船舶避碰路径,与现有船舶避碰路径规划方法相比,更符合船舶避碰的运动特征,对于提升船舶避碰安全性具有重要意义。
[0074]
基于上述理由本发明可在船舶避碰安全等领域广泛推广。
附图说明
[0075]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图做以简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0076]
图1为本发明提供的方法流程图。
[0077]
图2为本发明提供的性能受限的船舶避碰运动建模图。
[0078]
图3为本发明提供的性能受限的船舶避碰路径的构建表示图。
[0079]
图4为本发明提供的生物迁移启发式算法避碰路径优化流程图。
[0080]
图5为本发明提供的船舶避碰路径迁移操作示意图。
具体实施方式
[0081]
为了使本技术领域的人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
[0082]
需要说明的是,本发明的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本发明的实施例能够以除了在这里图示或描述的那些以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
[0083]
如图1所示,本发明提供了一种性能受限的船舶避碰路径规划方法,包括如下步骤:
[0084]
s1、利用船舶助航设备获取本船与目标船的船舶数据;在本实施例中,需要的船舶助航设备包括有全球定位系统(global positioning system,gps)、船舶自动识别系统(automatic identification system,ais)、自动雷达标绘仪(automatic radar plotting aids,arpa)、计程仪、船舶罗经、船舶雷达。获取的船舶数据有本船的经纬度、航向、航速,目标船的经纬度、航向、航速、距离、方位,本船与目标船的最近会遇距离(distance to the closest point of approach,dcpa)和最近会遇时间(time to the closest point of approach,tcpa)。
[0085]
具体实施时,作为本发明优选的实施方式,所述步骤s1的具体实现过程如下:
[0086]
s11、获取本船的船舶数据,利用gps获取本船经纬度,利用船舶罗经获取本船航向,利用计程仪获取本船航速;
[0087]
s12、获取目标船的船舶数据,利用ais获取目标船的经纬度、目标船的航速、目标船的航向,利用雷达获取目标船的方位和距离;
[0088]
s13、获取两船的最近会遇距离dcpa和最近会遇时间tcpa,根据s11和s12获取的本船和目标船的数据,利用自动雷达标绘仪arpa求解获取本船和目标船的最近会遇距离dcpa和最近会遇时间tcpa。
[0089]
s2、评估船舶安全性,判断本船与目标船是否存在碰撞危险;在本实施中,根据本船与目标船相遇时的最近会遇距离dcpa和最近会遇时间tcpa及设定的船舶安全会遇距离θ
safe
,安全会遇时间γ
safe
,判断本船与目标船是否存在碰撞危险。
[0090]
具体实施时,作为本发明优选的实施方式,所述步骤s2的具体实现过程如下:
[0091]
s21、设置船舶安全会遇距离θ
safe
,安全会遇时间γ
safe
,船舶安全领域是指船舶在航行时不可被他船侵犯的船舶周围的区域,船舶安全领域与船舶长度、船舶航速、船舶类型、船舶操纵性能相关。设定船舶安全会遇距离θ
safe
为船舶安全领域的半径,取值范围为1海里~2海里,安全会遇时间γ
safe
的取值范围为20~40分钟;
[0092]
s22、基于步骤s13中获取的本船与目标船的最近会遇距离dcpa和最近会遇时间tcpa,当在最近会遇距离dcpa小于安全会遇距离θ
safe
且最近会遇时间tcpa小于安全会遇时间γ
safe
时,认为两船存在碰撞危险。
[0093]
s3、结合船舶避让行为,利用船舶运动数学模型构建性能受限的船舶避碰路径;在本实施例中,首先,依据步骤s2确定本船与目标船存在碰撞风险后,根据国际海上避碰规则划定当前的船舶会遇态势,确定船舶避让责任和船舶避让行为。然后,结合船舶避让行为,构建性能受限的船舶避碰运动过程,包括六个阶段:船舶等待直航阶段g0;船舶避让转向阶段g1;船舶避让直航阶段g2;船舶返航转向阶段g3;船舶返航直航阶段g4;船舶复航转向阶段g5。六个阶段如图2所示。最后,利用船舶运动数学模型模拟船舶避让的转向运动阶段,构建性能受限的船舶避碰路径。构建的性能受限的船舶避碰路径由船舶避碰转向角度a1、船舶返航转向角度a2、船舶避让点距离d1、船舶复航点距离d2、船舶避让转向舵角r1、船舶返航转向舵角r2以及船舶复航转向舵角r3七个路径变量组成。定义船舶避碰路径p为上述七个路径变量的集合,即p
i
={a1,a2,d1,d2,r1,r2,r3}。其中,三个转向舵角作为船舶运动数学模型的输入,可以模拟船舶避碰过程中的三次转向阶段g1、g3和g5,可以解决规划避碰路径时考虑船舶操纵性能的问题。
[0094]
具体实施时,作为本发明优选的实施方式,所述步骤s3的具体实现过程如下:
[0095]
s31、根据国际海上避碰规则,确定船舶避让行为;
[0096]
s311、根据步骤s2确定的本船与目标船存在碰撞危险后,根据国际海上避碰规则判定船舶会遇态势;船舶会遇态势包括对遇态势、追越态势和交叉相遇态势;
[0097]
s312、根据不同的会遇态势确定本船与目标船的避让责任和避让行为,其中,交叉相遇态势,采取向右转向的避让行为;对遇态势,采取向右转向的避让行为;追越态势,采取向右转向的避让行为。
[0098]
s32、结合船舶避碰行为,构建性能受限的船舶避碰运动过程;
[0099]
s321、构建船舶避让过程,船舶避让过程是指确认本船与目标船存在碰撞危险后,采取避让行为直至让清目标船或驶过目标船,该过程包括船舶等待直航阶段g0、船舶避让转向阶段g1和船舶避让直航阶段g2;
[0100]
s322、构建船舶复航过程,船舶复航过程是指驶过目标船之后,本船返航回到原航线原航向的过程,包括船舶返航转向阶段g3、船舶返航直航阶段g4和船舶复航转向阶段g5;
[0101]
其中,g1、g3和g5三个转向运动阶段要考虑船舶的转向性能,用船舶运动数学模型模拟船舶的三个转向运动阶段,构建性能受限的船舶避碰运动过程。
[0102]
s33、构建性能受限的船舶避碰路径,考虑到船舶的操纵性能,为使规划的船舶避碰路径符合船舶的运动特征,需要考虑船舶转向即船舶舵角对船舶运动轨迹的影响。因此,如图3所示,构建性能受限的船舶避碰路径p
i
={a1,a2,d1,d2,r1,r2,r3},其中:
[0103]
a1:船舶避碰转向角度,代表船舶避让转向的幅度,取值范围为21~80度;
[0104]
a2:船舶复航转向角度,代表船舶复航转向的幅度,取值范围为21~80度;
[0105]
d1:船舶避让点距离,代表避让转向的时机,取值范围为0.1海里~6.0海里;
[0106]
d2:船舶复航点距离,代表船舶复航转向的时机,取值范围为0.1海里~6.0海里;
[0107]
r1:船舶避让转向舵角,代表船舶操纵性能限制,取值范围为5度~35度;
[0108]
r2:船舶返航转向舵角,代表船舶操纵性能限制,取值范围为5度~35度;
[0109]
r3:船舶复航转向舵角,代表船舶操纵性能限制,取值范围为5度~35度;
[0110]
将三个转向舵角作为船舶运动数学模型的输入,模拟船舶的避碰航行过程的三次转向运动阶段,以达到规划避碰路径符合船舶运动特征的目的。
[0111]
s4、应用基于生物迁移启发式算法优化船舶避碰路径;在本实施例中,船舶避碰路径p
i
={a1,a2,d1,d2,r1,r2,r3}为优化变量,设定七个路径变量各自的取值范围,七个路径变量各自取值组成一个船舶避碰路径,不同的取值组合情况组成不同的船舶避碰路径,求解最优船舶避碰路径就是在七个路径变量的所有组合中搜索最优的一种组合。因此,将船舶避碰路径规划问题转化为带有约束的组合优化问题,探索七个路径变量的最优组合,即搜索航程最短的船舶安全避碰路径。以船舶避碰安全为约束条件,以船舶避碰运动的航行距离为目标函数。然后,通过模拟栖息地之间的物种迁移,应用生物迁移启发式算法搜索最优船舶避碰路径。将船舶避碰路径视为基于生物迁移启发式算法中的栖息地,用二进制编码表示。栖息地的迁入率和迁出率与栖息地适宜度相关,通过模拟栖息地中物种的迁入迁出过程搜索具有最高适宜度的栖息地,即最短安全避碰路径。栖息地适宜度即为避碰路径的适应度,与避碰路径的航程和安全有关。
[0112]
具体实施时,作为本发明优选的实施方式,如图4所示,所述步骤s4的具体实现过程如下:
[0113]
s41、用二进制编码方式表示船舶避碰路径p={a1,a2,d1,d2,r1,r2,r3},确定七个路径变量的取值范围,利用二进制编码方式表示以上七个路径变量,组合起来表示性能受限的船舶避碰路径,如下表所示。生物迁移启发式算法中的栖息地代表船舶避碰路径,最高适宜度的栖息地就是航程最短的性能受限的船舶安全避碰路径;
[0114][0115]
s42、利用船舶运动数学模型模拟船舶转向运动阶段,考虑到船舶的操纵性和运动特征,采用船舶运动数学模型模拟船舶的避碰时的转向运动阶段,即步骤s32中的g1、g3和g5三个转向运动阶段;船舶转向时的转向舵角作为船舶运动数学模型的输入,模拟船舶的避碰时的转向运动阶段,得到船舶转向的运动轨迹;
[0116]
s43、计算适应度,评价船舶避碰路径;在保证船舶安全的条件下,求解航程最短的船舶避碰路径;
[0117]
船舶避碰路径规划的目标函数s为船舶避碰路径的航程,即步骤s33所述六个阶段的航程之和,采用如下表示:
[0118][0119]
船舶避碰路径规划的安全约束为两船的最近距离θ
min
大于设定的船舶安全会遇距离θ
safe
,采用如下公式表示:
[0120]
θ
min
>θ
safe
[0121]
适应度函数f与船舶避碰路径的航程s与安全系数δ有关,采用如下公式表示:
[0122]
f=δ*(s
oc
/s)
[0123]
其中,s
oc
是船舶避碰路径的最小航程,即本船初始位置点o和航线交叉点c的直线距离;满足安全约束时,安全系数δ等于1;不满足安全约束时,安全系数δ等于0;
[0124]
a1,a2的取值约束为21度~80度,采用如下公式表示:
[0125]
21≤a
i
≤80,i∈{1,2}
[0126]
d1,d2的取值约束为0.1海里~6.0海里,采用如下公式表示:
[0127]
0.1≤d
j
≤6.0,j∈{1,2}
[0128]
r1、r2和r3的取值约束为5度~35度,采用如下公式表示:
[0129]
5≤r
k
≤35,k∈{1,2,3};
[0130]
s44、评判当前的船舶避碰路径是否达到收敛标准;收敛标准可设置为最大迭代次数,也可设置为多次迭代船舶避碰路径不再优化,若达到收敛标准,则输出当代最优船舶避碰路径p={a1,a2,d1,d2,r1,r2,r3};
[0131]
s45、应用生物迁移启发式算法的迁移策略,更新船舶避碰路径。
[0132]
s451、将船舶避碰路径作为栖息地,二进制编码的船舶避碰路径的每一位二进制码作为物种,模拟物种在各栖息地之间的迁移过程,寻找最优适宜度的栖息地,即航程最短的船舶安全避碰路径;
[0133]
s452、将所有船舶避碰路径按照适应度由小到大排序,r
k
是排序位置,n是避碰路径的个数;船舶避碰路径的迁移率与其适应度有关,船舶避碰路径适应度越大,迁出率越高,迁入率越低;
[0134]
s453、生成0~1的随机数,对二进制编码的船舶避碰路径逐位判定是否执行迁入操作,随机数大于迁入率,则执行迁入操作;
[0135]
s454、将迁出率μ
k
采用如下公式表示:
[0136]
μ
k
=1/2(1
‑
cos(πr
k
/n))
[0137]
s455、将迁入率λ
k
采用如下公式表示:
[0138]
λ
k
=1
‑
μ
k
[0139]
s456、被迁入的二进制位从其他船舶避碰路径中选择,利用轮盘赌选择方法选择船舶避碰路径,第j个船舶避碰路径p
j
的被选概率pr(p
j
)公式如下:
[0140][0141]
其中,u
j
是第j个船舶避碰路径的迁出率;
[0142]
s457、选中被迁入船舶避碰路径后,对应的二进制位迁入当前船舶船舶避碰路径,替换原来的二进制位,完成一次迁移操作;
[0143]
s458、更新船舶避碰路径后,执行步骤s43,直至收敛,输出航程最短的船舶安全避碰路径。船舶避碰路径的迁移操作示意见图5。
[0144]
s5、输出航程最短的性能受限的安全船舶避碰路径。可以为船舶驾驶员提供决策支持,包括船舶避让决策和船舶复航决策,在保证船舶安全的情况下尽可能减少航程损失。得到的船舶避碰路径考虑了船舶操纵性,符合船舶的运动特征,可以提高规划路径的可实施性。
[0145]
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。