1.本发明属于模糊容错控制技术领域,更为具体地讲,涉及一种基于自适应观测器的非线性系统模糊容错控制方法。
背景技术:
2.在实际应用中,由于系统固有的非线性特性或非线性分量的存在,几乎所有的系统都是非线性系统。近年来,非线性系统引起了许多研究者的关注。通常,在工业控制中,执行器或传感器的故障经常由于温度变化、系统部件老化等原因发生,由于这些故障的存在,控制系统的性能可能会恶化或导致系统的不稳定。特别是近年来,对非线性系统故障的研究也受到关注。[“decentralized adaptive nn output
‑
feedback fault compensation control of nonlinear switched large
‑
scale systems with actuator dead
‑
zones”(z.ma,and h.ma,ieee transactions on systems,man,and cybernetics:systems,vol.50,no.9,pp.3435
‑
3447,2020.)]针对具有故障的非线性切换大规模系统,设计了一种基于神经网络的自适应分散容错控制来补偿故障。[“barrier lyapunov function
‑
based adaptive fault
‑
tolerant control for a class of strict
‑
feedback stochastic nonlinear systems”(x.yu,t.wang,j qiu,and h.gao,ieee transactions on cybernetics,vol.51,no.2,pp.938
‑
946,2021.)]考虑到随机非线性系统中的锁定和失效故障,提出了一种自适应模糊容错控制方法来补偿故障。然而,到目前为止,具有状态约束的非线性系统的容错控制问题尚未得到充分研究,因为在补偿故障的同时保持状态约束更具挑战性。
技术实现要素:
[0003]
本发明的目的在于克服现有技术的不足,提供一种基于自适应观测器的非线性系统模糊容错控制方法,以能够有效地解决非线性系统在故障和状态约束下的故障容错、状态估计以及跟踪控制问题。
[0004]
为实现上述发明目的,本发明基于自适应观测器的非线性系统模糊容错控制方法,针对非线性系统中的故障问题,设计了一种基于自适应滑模的估计器;针对非线性系统的状态约束问题,构造了一种基对数型的李雅普诺夫函数;为了实现跟踪控制,设计了一种模糊容错控制器。本发明能够有效解决非线性系统在故障和状态约束下的故障和状态估计以及跟踪控制问题。
[0005]
所述自适应观测器设计,定义最优的权重参数为δ
i*
,设计滑模函数为:
[0006][0007]
其中其中为的估计值。于是设计观测器:
[0008]
[0009][0010]
其中v
i
为中间变量,ξ
i
>0表示观测器调节参数,φ
i
(t)表示自适应参数,其自适应律为:
[0011][0012][0013]
且
[0014][0015][0016][0017][0018]
其中μ
0i
>0,π
i
>0,β
i
>0,0<γ
i
<1和q
i
>1均为自适应律调节参数。
[0019]
所述状态估计器设计,设计一种状态估计器,如下:
[0020][0021]
其中c
i
为估计器调节参数。
[0022]
所述模糊容错控制器设计,设计如下控制器:
[0023][0024]
其中τ
n
‑1和τ
n
表示虚拟控制误差,λ
n
>0和ρ
n
>1为控制器调节参数,参数>1为控制器调节参数,参数及f
n0
的计算将在说明书中给出。
[0025]
本发明的目的是这样实现的。
[0026]
本发明基于自适应观测器的非线性系统模糊容错控制方法涉及含有非线性系统的自适应观测器设计、状态估计器设计以及模糊容错控制器设计。本发明针对非线性系统中的故障问题,设计了一种基于自适应滑模的估计器;针对非线性系统的状态约束问题,构造了一种基对数型的李雅普诺夫函数;为了实现跟踪控制,设计了一种模糊容错控制器。本发明能够有效解决非线性系统在故障和状态约束下的故障和状态估计以及跟踪控制问题。
附图说明
[0027]
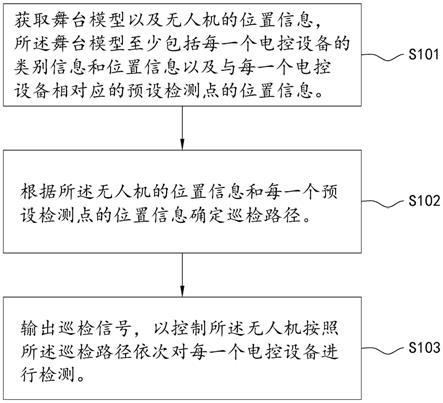
图1是本发明基于自适应观测器的非线性系统模糊容错控制方法一种具体实施方式的原理示意图。
具体实施方式
[0028]
下面结合附图对本发明的具体实施方式进行描述,以便本领域的技术人员更好地理解本发明。需要特别提醒注意的是,在以下的描述中,当已知功能和设计的详细描述也许会淡化本发明的主要内容时,这些描述在这里将被忽略。
[0029]
图1是本发明基于自适应观测器的非线性系统模糊容错控制方法一种具体实施方式的原理示意图。
[0030]
如图1所示,本发明涉及含有非线性系统的自适应观测器设计、状态估计器设计以及模糊容错控制器设计。
[0031]
考虑如下非线性系统:
[0032][0033]
其中y∈r和u(t)∈r分别表示系统的输出和输入,和表示系统的状态,满足约束条件:|x
i
|≤κ
i
,i=1,2,...,n,其中κ
i
>0且为常数,i=1,2,...,n代表光滑的未知非线性函数,η
i
(t),i=1,2,...,n表示系统的故障。
[0034]
非线性系统(1)满足假设:(1)故障项的一阶和二阶导数是有界的,即和其中上界是未知的,但界限是可获得的;(2)对于任意x1,x2∈r
i
,存在常量l
i
使得条件|h
i
(x1)
‑
h
i
(x2)|≤l
i
||x1‑
x2||,i=1,...,n成立;(3)期望信号y
r
(t)是可微分和有界的,满足条件其中和是两个正常数。
[0035]
通常,采用模糊逻辑的方法来逼近平滑的非线性函数,如对任意常数ε>0,h(x)是定义在紧致集合m上的连续函数,则存在一个模糊逻辑系统使得:
[0036][0037]
其中δ
t
表示权重向量,表示激励函数。
[0038]
自适应观测器和状态估计器设计
[0039]
首先未知的光滑非线性函数可以近似为:
[0040][0041]
其中表示的估计值。
[0042]
其次最优参数δ
i*
可以通过下面方程求得:
[0043][0044]
其中ω
i
和表示两个有界的紧致集,且
[0045]
定义变量作为非线性函数的模糊估计误差,它们满足其中表示误差上界。进一步,将状态近似误差定义为:
[0046][0047]
其中表示状态x
i
的估计值。
[0048]
构造状态估计器:
[0049][0050]
其中c
i
为常数且c
i
>2,v
i
表示辅助变量,它将被设计使得故障的估计误差可以在有限时间内收敛于0,其中表示故障η
i
(t)的估计值。
[0051]
进一步,构造如下滑模函数:
[0052][0053]
其中和如果辅助变量v
i
(i=1,2,...,n)的动态模型设计如下:
[0054][0055]
其中ξ
i
是常数且满足ξ
i
>0,sgn(
·
)表示符号函数,故障通过下式进行估计:
[0056][0057]
则故障的估计误差可以在有限时间内收敛于0。其中参数φ
i
可按照如下自适应律进行更新:
[0058][0059][0060]
且:
[0061][0062][0063][0064][0065]
其中μ
0i
>0,π
i
>0,β
i
>0,0<γ
i
<1和q
i
>1均为调节参数。
[0066]
模糊容错控制器设计
[0067]
根据上面设计的状态估计器和观测器,非线性系统(1)可以进一步描述为:
[0068][0069]
于是,定义误差变量:
[0070][0071]
其中α
i
‑1,i=2,...,n表示虚拟控制输入,τ
i
,i=1,2,...,n表示虚拟误差。
[0072]
下面将根据反步控制算法的思想,设计虚拟控制输入和实际控制输入。
[0073]
首先,定义扩展误差变量e=(e1,e2,...,e
n
)
t
,设计李雅普诺夫函数:
[0074][0075]
步骤1:对误差变量τ1微分,得
[0076][0077]
构造如下对数型李雅普诺夫函数
[0078][0079]
其中p1表示正定对称矩阵,其中和
[0080]
对v1进行求导,得
[0081][0082]
于是,构造如下虚拟控制输入α1和参数自适应律
[0083][0084][0085]
其中λ1>0和ρ1>1。
[0086]
步骤i(i=2,...,n
‑
1):对误差变量τ
i
微分,得:
[0087][0088]
构造如下对数型李雅普诺夫函数:
[0089][0090]
其中p
i
表示正定对称矩阵,其中和和
[0091]
对v
i
进行求导,得:
[0092][0093]
为了求解上式中的设计如下超螺旋观测器:
[0094][0095]
其中ζ
il
(l=0,1)和f
i0
表示超螺旋系统的状态,ξ
il
(l=0,1)表示观测器参数,且满足ξ
il
>0。
[0096]
进一步,按如下式计算参数
[0097][0098]
其中ω
i
‑1表示参数估计误差,其上界为将代入得:
[0099][0100]
于是,构造虚拟控制输入和参数自适应律:
[0101][0102][0103]
其中λ
i
>0和ρ
i
>1。
[0104]
步骤n:对误差变量τ
n
微分,得:
[0105][0106]
构造如下对数型李雅普诺夫函数:
[0107][0108]
其中p
n
表示正定对称矩阵,且和和
[0109]
对v
n
微分,得:
[0110][0111]
于是,设计如下实际控制输入和参数自适应律:
[0112][0113][0114]
将其代数上式,经化简得:
[0115][0116]
其中c=min{2(c
i
‑
2),2λ
i
,(ρ
i
‑
1)p
i
,i=1,...,n}和不等式(35)表明,跟踪误差及所有的闭环系统信号是有界的。
[0117]
尽管上面对本发明说明性的具体实施方式进行了描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。