1.本发明涉及水产养殖技术领域,具体而言,涉及一种升降式养殖网箱系统及控制方法。
背景技术:
2.网箱养殖是现阶段海水鱼类养殖的主要方式,随着传统海洋渔业资源衰退和传统作业渔场老化,网箱养殖业越来越多地引起世界各沿海国家的重视。
3.随着海洋养殖的发展,养殖网箱不仅局限于沉于水下,还要求可以通过升降等动作实现更多功能。例如,日常养殖工作状态时能够自适应潮差引起的水位变化,悬浮在某一吃水深度,而在进行捕捞作业时可以上浮,遭遇台风赤潮等灾害时可以下沉避灾等。
4.现有技术中通常是在水面漂浮养殖平台,养殖平台包括养殖网箱,在养殖平台底部设置浮箱,通过浮箱实现网箱的升降,但这种方式对遭遇自然灾害时进行水下避险的抵御能力较弱,安全性较低。
技术实现要素:
5.本发明解决的问题是现有技术中的养殖网箱抗风浪能力较低,安全性低等不足。
6.为解决上述问题中的至少一个方面,本发明提供一种升降式养殖网箱系统,包括:
7.网笼、锚固桩、桩套、竖向支撑结构及浮箱;
8.所述网笼包括网笼本体及网笼轴,所述网笼轴与所述桩套连接,所述桩套套设于所述锚固桩上,且所述桩套适于沿所述锚固桩的轴向移动;
9.所述浮箱包括第一浮箱和第二浮箱,所述竖向支撑结构及所述第一浮箱均套设于所述锚固桩上,且所述竖向支撑结构位于所述桩套与所述第一浮箱之间,所述第二浮箱连接于所述网笼本体朝向所述锚固桩的端部。
10.本发明在锚固桩上套设第一浮箱,在网笼本体端部设置第二浮箱,通过第一浮箱和第二浮箱的上浮或下沉来控制网笼升降,并通过网笼轴与桩套的连接及桩套在锚固桩上的滑动实现网笼升降,结构设计简单。且由于第一浮箱套设于锚固桩上,第二浮箱连接在网笼本体上,因此浮箱不易偏离,稳定性高,增强了网箱对抗风浪的能力,提高了安全性。
11.较佳地,所述第二浮箱包括环形箱体和气仓,所述气仓绕所述网笼轴设置,所述气仓与所述环形箱体同心设置且所述环形箱体位于所述气仓外圈,所述气仓与所述环形箱体之间连接有第一气道,所述第一气道上设置有第一电磁阀,所述环形箱体的外壁上设置有进出口,所述进出口处安装有第二电磁阀。
12.由此,通过控制第一电磁阀和第二电磁阀,实现第二浮箱内注水下沉或第二浮箱排水上浮,进而实现网笼的升降。
13.较佳地,所述进出口为多个,多个所述进出口在所述环形箱体的外壁上沿周向均匀分布。
14.由此,通过设置的多个进水口,实现第二浮箱内快速注水下沉或者快速排水上浮。
15.较佳地,每个所述进出口处均设置有第一倾角开关和第二倾角开关,所述第一倾角开关和所述第二倾角开关分别与所述第二电磁阀电连接,且所述第一倾角开关和所述第二倾角开关的触发角度不同。
16.由此,通过在进出口处设置两个倾角开关,对第二浮箱的不同位置进行监测,并控制对应的第二电磁阀开启,实现在指定倾角范围内的第二电磁阀的开启或关闭。
17.较佳地,所述气仓与所述环形箱体之间还连接有第二气道,所述第二气道上设置有第二空气压缩泵,所述第二空气压缩泵用于向所述气仓内泵入高压气体。
18.由此,通过第二空气压缩泵实现对气仓的补气。
19.较佳地,所述第二气道与所述环形箱体连通处设置有进气口,所述进气口处安装有单向阀。
20.由此,通过单向阀的设置,使得气体只能从环形箱体进入气仓内,而气仓内的气体无法从第二气道进入环形箱体内。
21.较佳地,所述第二气道上还设置有第三倾角开关,所述第三倾角开关与所述第二空气压缩泵电连接。
22.由此,通过设置第三倾角开关,使得第二空气压缩泵只有在第二浮箱转动至特定位置时才能开启,并使得进入环形箱体内的为气体而非水,避免环形箱体内进水,影响第二空气压缩泵的正常运转。
23.较佳地,所述第一浮箱由多块单元浮箱拼接而成。
24.较佳地,所述第一浮箱包括浮箱本体、压缩空气仓、第一空气压缩泵及出入水孔,所述压缩空气仓设置于所述浮箱本体内,所述压缩空气仓外壁设置有阀门,所述第一空气压缩泵用于将所述浮箱本体内的气体泵入所述压缩空气仓内,所述出入水孔设置于所述浮箱本体的底部。
25.本发明还提供一种升降式养殖网箱系统的控制方法,基于如上所述的升降式养殖网箱系统,包括:
26.获取网笼的升降指令,根据所述升降指令控制第一浮箱和第二浮箱的升降;
27.其中,当所述升降指令为需要所述网笼下沉时,控制所述第一浮箱和所述第二浮箱内均注水;
28.当所述升降指令为需要所述网笼上浮时,控制所述第一浮箱和所述第二浮箱均向外排水,并于所述网笼上浮后控制所述第二浮箱进行补气。
29.本发明的升降式养殖网箱系统的控制方法相较于现有技术具有的有益效果如下:
30.本发明通过控制第一电磁阀、第二电磁阀及第二空气压缩泵的开闭,实现第二浮箱上浮、下沉、补气等不同工作状态,并通过与第一浮箱的共同作用,实现网笼的升降,且控制方法简单,易操作。
附图说明
31.图1为本发明实施例中网笼升降示意图;
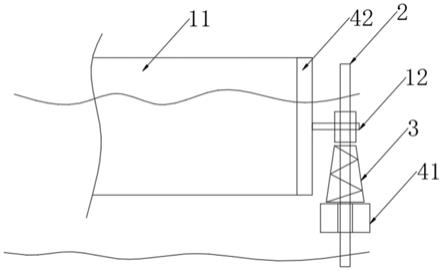
32.图2为本发明实施例中升降式养殖网箱系统的结构示意图;
33.图3为本发明实施例中桩套布置示意图一;
34.图4为本发明实施例中桩套布置示意图二;
35.图5为本发明实施例中第一浮箱布置示意图一;
36.图6为本发明实施例中第一浮箱布置示意图二;
37.图7为本发明实施例中第一浮箱结构示意图;
38.图8为本发明实施例中第二浮箱的结构示意图;
39.图9为本发明实施例中第二浮箱下部预设角度范围内的第二电磁阀开启的示意图;
40.图10为本发明实施例中第二浮箱上部预设角度范围内的第二电磁阀开启的示意图;
41.图11为本发明实施例中第二电磁阀控制电路示意图。
42.附图标记说明:
43.1、网笼;2、锚固桩;3、竖向支撑结构;
44.11、网笼本体;12、网笼轴;21、桩套;22、滑轮;23、限位结构;41、第一浮箱;42、第二浮箱;
45.411、单元浮箱;412、垫层;413、浮箱本体;414、压缩空气仓;415、第一空气压缩泵;416、出入水孔;
46.421、环形箱体;422、气仓;423、第一气道;424、第一电磁阀;425、第二电磁阀;426、第二气道;427、第二空气压缩泵;428、单向阀。
具体实施方式
47.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
48.请参阅图1
‑
11所示,本发明实施例提供一种升降式养殖网箱系统,包括:
49.网笼1、锚固桩2、桩套21、竖向支撑结构3及浮箱;
50.网笼1包括网笼本体11及网笼轴12,网笼轴12与桩套21连接,桩套21套设于锚固桩2上,且桩套21适于沿锚固桩2轴向移动;
51.浮箱包括第一浮箱41和第二浮箱42,竖向支撑结构3及第一浮箱41均套设于锚固桩2上,且竖向支撑结构3位于桩套21与第一浮箱41之间,第二浮箱42连接于网笼本体11的端部。
52.如图1所示,为网笼1升降示意图,捕鱼时,将网笼1提升至足够小的吃水深度,遭遇台风等极端天气时降低至水面以下规避。如图2所示,为升降式网箱系统的局部结构示意图,网箱配合两根锚固桩2使用,锚固桩2固定于海底,在网络升降过程中起到稳定和导向作用。第一浮箱41嵌套于锚固桩2上,竖向支撑结构3嵌套在锚固桩2上并落在可升降的第一浮箱41上,可滑动的桩套21落在竖向支撑结构3上,伸出网笼本体11的网笼轴12与桩套21外壁连接,网笼本体11的端部连接第二浮箱42。由此,通过第一浮箱41和第二浮箱42控制网笼1升降,通过桩套21在锚固桩2上的滑动实现网笼1升降。
53.如图3、4所示,为桩套21与锚固桩2的连接布置图,桩套21与锚固桩2之间通过滑轮22连接,由此实现桩套21在锚固桩2上的滑动。示例性地,锚固桩2上沿轴向设置有滑轨,滑轮22固定于桩套21的内壁。锚固桩2可以为方桩,也可以为圆桩,即锚固桩2的横截面有方形和圆形两种,对应地,桩套21的横截面可以为方形,也可以为圆形。当锚固桩2为方桩时,如
图3所示,在锚固桩2的四个角分别设置有两个滑轮22,以此使得桩套21与锚固桩2之间的滑动更加稳定。当锚固桩2为圆桩时,如图4所示,为了防止桩套21相对锚固桩2发生转动,在桩套21与锚固桩2之间设置有限位结构23,限位结构23包括相互配合的限位凸起和限位槽。示例性地,限位凸起设置于锚固桩2的外壁,限位槽开设于桩套21的内壁,通过限位凸起与限位槽的配合,使得桩套21不能够发生圆周转动,而只能够沿着锚固桩2进行轴向滑动。
54.其中一些实施方式中,第一浮箱41为装配式可升降浮箱,由多块单元浮箱411拼接而成,分块拼接构造的方式便于浮箱的预制和安装。应当理解,两块单元浮箱411之间通过连接件及螺栓等紧固件连接,此为现有技术,在此不再赘述。单元浮箱411的形状可以不作限制,多块单元浮箱411组合后的浮箱的形状也可以不作限制。例如,单元浮箱411可以为三角形、长方形、正方形、平行四边形、梯形或正六边形等中的一种或多种。示例性地,如图5所示,第一浮箱41由两块单元浮箱411构成,单元浮箱411的形状为长方形,如图6所示,单元浮箱411的形状为l形。无论单元浮箱411为何种形状,拼接后的浮箱中心具有适于锚固桩2通过的孔。
55.优选实施方式中,第一浮箱41与锚固桩2之间套设有垫层412。垫层412时采用低摩擦系数材料制成的垫层412,由此降低第一浮箱41上下浮动时的阻力。
56.示例性地,第一浮箱41的工作原理如图7所示,第一浮箱41包括浮箱本体413、压缩空气仓414、第一空气压缩泵415及出入水孔416,压缩空气仓414设置于浮箱本体413内,压缩空气仓414外壁设置有阀门,阀门优选为电磁阀,阀门开启时,气体从压缩空气仓414内排出,第一空气压缩泵415用于将浮箱本体413内的气体泵入压缩空气仓414内,出入水孔416设置于浮箱本体413的底部。由此,当需要第一浮箱41浮升时,阀门开启,释放压缩空气仓414内的气体,气体将浮箱本体413内的水从出入水孔416排挤出,为浮箱提供升力,使得第一浮箱41升起。当需要第一浮箱41下降时,压缩浮箱本体413内的气体至压缩空气仓414,水从出入水孔416进入浮箱本体413内,即浮箱本体413内注水,使得浮箱下沉。应当理解,当第一浮箱41为装配式浮箱时,每个单元浮箱411也可以采用上述原理实现。
57.为了更好地实现网笼1的升降,不仅在锚固桩2上套设第一浮箱41,还在网笼本体11的两端分别设置第二浮箱42,通过第一浮箱41和第二浮箱42的共同作用实现浮箱的升降,进而实现网笼1的升降。
58.其中一些实施方式中,如图8所示,第二浮箱42包括环形箱体421和气仓422,气仓422与环形箱体421同心设置,即气仓422位于环形箱体421的内部。气仓422优选为环形气仓。气仓422与环形箱体421之间连接有第一气道423和第二气道426,其中,第一气道423上设置有第一电磁阀424,第一电磁阀424用于控制气仓422与环形箱体421的连通或断开。当第一电磁阀424打开时,气仓422内的气体由第一气道423通向环形箱体421。环形箱体421的外壁上设置有进出口,进出口处安装有第二电磁阀425,第二电磁阀425用于控制进出口的开闭,当第二电磁阀425打开时,空气或水可通过进出口进出。进出口可以为多个,多个进出口在环形箱体421的外壁上沿周向均匀分布。
59.第二气道426上设置有第二空气压缩泵427,第二空气压缩泵427用于向气仓422内泵入高压气体,以对气仓422进行充气。第二气道426与环形箱体421连通处设置有进气口,进气口处安装有单向阀428,单向阀428的设置,使得气体只能从环形箱体421经进气口进入第二气道426内,并进一步进入气仓422内,气仓422内的气体无法从第二气道426进入环形
箱体421内,而只能从第一气道423进入环形箱体421内。
60.通过控制第一电磁阀424、第二电磁阀425及第二空气压缩泵427的开闭,可以实现第二浮箱42的升降。第一电磁阀424、第二电磁阀425及第二空气压缩泵427均可以通过外接电源或蓄电池驱动,并可通过遥控系统实施控制其开关状态。例如,第一电磁阀424和第二电磁阀425通电则打开,断电则关闭。第二空气压缩泵427通电则开启工作。
61.为了实现网笼1端部第二浮箱42的压载(注水)和卸载(排水)功能,需解决网笼1自转变位导致的进排水口位置不固定的问题。由此,本实施例对第二浮箱42的姿态及所处位置进行监测,以进行相应的控制。
62.示例性地,在环形箱体421的进出口处以及连接环形箱体421与气仓422的连接气道上均设置有倾角开关,倾角开关分别与第二电磁阀和第二空气压缩泵电连接,当倾角开关达到其触发角度时,控制与该倾角开关对应的第二电磁阀或者空气压缩泵开启。由此,通过设置倾角开关,实现指定倾角范围内第二电磁阀的打开或关闭,或者第二空气压缩泵的开启或关闭。
63.应当理解的是,倾角开关的内部安装有倾角传感器、处理器和控制器,倾角传感器用于检测倾角开关安装后发生的倾斜角度,本实施例中倾角传感器可以选择滚珠式倾角传感器,处理器用于分析倾角传感器发送的信息,控制器用于接收处理器发送的命令控制相应电磁阀的通断。
64.具体地,在环形箱体421的每个进出口处均设置两个倾角开关,分别为第一倾角开关和第二倾角开关,第一倾角开关和第二倾角开关分别与第二电磁阀425电连接,即通过电路设计,可以实现第一倾角开关和第二倾角开关与第二电磁阀425连通或断开。另外,第一倾角开关和第二倾角开关的触发角度不同。可以理解的是,随着网笼1的转动,第二浮箱42也在转动,对于第二浮箱42上的某一个进出口来说,其所处位置也在发生变化。例如,随着第二浮箱42的转动,该进出口由位于第二浮箱42的顶部转至第二浮箱的底部。对于第二浮箱42来说,当其处于不同状态时,需要打开不同位置处的进出口,以实现注水或排水等功能,但由于第二浮箱42随网笼1不断转动变位,因此第二浮箱42外壁的进出口的位置不断发生变化。
65.当第一倾角开关达到其触发角度时,控制与该第一倾角开关对应的第二电磁阀开启。示例性地,如图9所示,假设位于第二浮箱下部且位于第二浮箱圆心角α范围内的第一倾角开关达到其触发角度,则控制与该第一倾角开关对应的第二电磁阀开启,图9中未填充的圆圈表示第二电磁阀处于开启状态。
66.当第二倾角开关达到其触发角度时,控制与该第二倾角开关对应的第二电磁阀开启。示例性地,如图10所示,假设位于第二浮箱上部且位于第二浮箱圆心角β范围内的第二倾角开关达到其触发角度,则控制与该第二倾角开关对应的第二电磁阀开启,图10中未填充的圆圈表示第二电磁阀处于开启状态。
67.因此,本实施例通过在每个进出口处设置第一倾角开关和第二倾角开关,通过将两个倾角开关的触发角度设置为不同的角度,使得第二浮箱42处于不同转动状态时,可以分别实现其上不同位置的进出口处的第二电磁阀425开启。
68.具体地,第二气道426上还设置有第三倾角开关,第三倾角开关与第二空气压缩泵427电连接。当第三倾角开关检测到第二浮箱42倾斜至某一角度时,控制第二空气压缩泵
427通电开启,从而实现气仓422的进气。可以理解的是,为了实现气仓422的进气,需要在第二浮箱42转动至进气口处于上部时才可,因为此时进入第二浮箱42内部的为空气而非水。
69.下面结合网笼1的不同作业状态对本发明进行详细说明。
70.当网笼1处于正常工作状态时,第一电磁阀424、第二电磁阀425及第二空气压缩泵427均关闭,此时未进行网笼1的升降。其中,当升降指令为需要网笼1下沉时,控制第一浮箱41和第二浮箱42内均注水;
71.当升降指令为需要网笼1上浮时,控制第一浮箱41和第二浮箱42均向外排水,并控制第二浮箱42进行补气。具体地,当网笼1需要下沉避灾时,第一电磁阀424和第二空气压缩泵427均关闭,第二电磁阀425与倾角开关之间断开,使得所有的第二电磁阀425均开启,为便于叙述,将第二电磁阀425全部开启的状态记为第二电磁阀425的a状态。此时,由于第一电磁阀424和第二空气压缩泵427均关闭,环形箱体421与气仓422之间的第一气道423和第二气道426均关闭,即气仓422内的气体无法进入环形箱体421内,且也没有气体由环形箱体421内进入气仓422内。同时,由于第二电磁阀425全部开启,因此环形浮箱内注水,使得第二浮箱42下沉,进而带动网笼1下沉。
72.另外,为了更快地实现网笼1下沉,第一浮箱41的第一空气压缩泵415压缩浮箱本体413内的气体至空气压缩仓,使得第一浮箱41内也注水下沉。
73.当网笼1需要上浮时,第一电磁阀424开启,第二空气压缩泵427关闭。第二电磁阀425与第一倾角开关电连接,使得位于第二浮箱42下部预设角度范围内的第二电磁阀425开启,为便于叙述,记为第二电磁阀425的b状态,如图9所示,此时,由于第一电磁阀424开启,第二空气压缩泵427关闭,因此,气仓422内的高压气体由第一气道423进入环形箱体421内。由于位于第二浮箱42下部预设角度范围内的第二电磁阀425开启,可以理解,这部分开启的电磁阀处于水中。因此,由气仓422放出的高压气体进入环形箱体421后,将箱体内的水由第二浮箱42底部的进出口处挤出,由此使得第二浮箱42底部具有上升的力,使得第二浮箱42上浮。
74.另外,为了更快地实现网笼1上浮,第一浮箱41的第一空气压缩泵415释放空气压缩仓内的气体,为第一浮箱41提供浮力。
75.当网笼1上浮之后,由于在上浮阶段气仓422内的气体通过第一气道423排出,因此还需要对气仓422进行补气。此时,控制第一电磁阀424关闭,使得气仓422内的气体不再继续排出。同时,第二电磁阀425及第二倾角开关电连接,使得位于第二浮箱42上部预设角度范围内的第二电磁阀425开闭,如图10所示,为便于叙述,记为第二电磁阀425的c状态,由此外界空气可以通过环形箱体421外壁上的进出口进入环形箱体421内。同时,第二空气压缩泵427也开启,以便于进入环形箱体421内的空气可以在第二空气压缩泵427的作用下进入气仓422内,以实现气仓422内气体的补充,为下一次第二浮箱42的上浮做准备。
76.上述各种状态可以通过适当布设的电路和控制系统实现。以第二电磁阀425的a状态、b状态及c状态为例,其可以通过如图11所示的电路实现。
77.如图11所示,为第二电磁阀425的控制电路示意图,其中,图11中所示的编号425代表第二电磁阀。当开关指向a时,第二电磁阀425与倾角开关未串联,此时第二电磁阀425全部开启。当开关指向b时,第二电磁阀425与第一倾角开关串联,此时达到第一倾角开关触发角度的第二电磁阀425开启。当开关指向c时,第二电磁阀425与第二倾角开关串联,此时达
到第二倾角开关触发角度的第二电磁阀425开启。
78.最后应说明的是,以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。