1.本说明书一个或多个实施例涉及水面垃圾清理技术领域,尤其涉及一种基于全固态激光雷达的无人水面垃圾清理船及工作方法。
背景技术:
2.随着国家经济的飞速发展,科学技术不断提高,公共设施及旅游区的建设力度不断加大,由于地面上的垃圾随风飘散,或者是由于公民、游客的素质问题,在公园景区的溪流、城市的河流上都漂浮着随处可见的白色垃圾,严重的破坏了我国水生生物的生态平衡。传统的水面垃圾清理方案中,采用竹竿打捞,范围有限,效率低下;人工驾驶小船打捞,费时费力,人工成本大;后续又相继出现各种垃圾清理船,由于依靠燃油驱动,容易造成环境污染、噪声污染,同时可能会因为油泄露造成水质的二次污染。
3.后来随着第三次工业革命信息技术产业的大发展以及第四次工业革命智能化产业发展的来临,无人装备制造领域取得了快速发展,无人船也逐渐进入人们的视野,目前市场上的无人垃圾清理船,大多是依靠于gps定位,依据垃圾分类需求的原理去拾取垃圾,其垃圾清理的精准度和探测性能上的问题还需要进一步提升。
技术实现要素:
4.有鉴于此,本说明书一个或多个实施例的目的在于提出一种基于全固态激光雷达的无人水面垃圾清理船及工作方法,以解决目前的垃圾清理船精准度不足的问题。
5.基于上述目的,本说明书一个或多个实施例提供了一种基于全固态激光雷达的无人水面垃圾清理船,包括:
6.船体,船体搭载有驱动其移动的动力装置;
7.清理装置,安装在船体上,用于垃圾清理;
8.垃圾分类存储区,设置在船体上,用于集中放置垃圾;
9.传动装置,用于将清理装置清理出的垃圾传送至垃圾分类存储区中;
10.探测设备,安装在船体前端,包括全固态激光雷达,全固态激光雷达用于采集船体周围的环境数据,并检测水面周围目标;
11.控制中心用于根据全固态激光雷达采集到的信息,处理动力装置、清理装置和传动装置的执行动作,将水面上的垃圾清理到垃圾分类存储区中。
12.优选地,清理装置包括:
13.传输电机,安装在船体内部一侧;
14.转动轴,安装在船体前端,转动轴上安装有多个扇叶;
15.组合传动装置,一端与传输电机连接,另一端与转动轴连接,用于带动转动轴转动。
16.优选地,组合传动装置包括轮轴,轮轴两侧的轮盘分别连接有第一条链和第二条链的一端,第一条链的另一端与传输电机连接,第二条链的另一端与转动轴的轮盘相连。
17.优选地,清理装置还包括第一级过滤层,第一级过滤层为扇叶上均匀开设的条形通孔。
18.优选地,船体前侧安装有支架,转动轴设置为两组,分别安装在支架的两侧。
19.优选地,传动装置包括垃圾传送带和齿轮轴,垃圾传送带上设有滤水带和阻挡块,齿轮轴包括两个第二轮轴,两个第二轮轴分别设置于垃圾传送带两端,其中一个第二轮轴与传输电机连接.
20.优选地,全固态激光雷达包括相位可调的激光发射器、3d成像传感器和旋转台,激光发射器和3d成像传感器安装在旋转台上,激光发射器用于发出激光,3d成像传感器用于捕捉反射的激光,得到船体周围的环境数据信息和水面周围目标信息。
21.优选地,垃圾分类存储区中设置有滤板,滤板侧面安装有活动的第一推动块,滤板底部安装有第二级过滤层,第二级过滤层侧面安装有活动的第二推动块,滤板两侧还连接有垃圾回收运输带,两侧的垃圾回收带另一端分别连接有第一垃圾处理口和第二垃圾处理口,第二季过滤层侧面还连接有垃圾回收通道;
22.垃圾分类存储区处还安装有摄像头,控制中心用于接收摄像头的检测信息,若判断垃圾达到设定量,则停止清理装置工作,并控制动力装置将垃圾清理船驱动到指定位置。
23.优选地,本垃圾清理船还包括能源装置,能源装置用于提供能源,能源装置包括太阳能电池收集板,太阳能电池收集板包括太阳能电池片阵列组合和接线盒,接线盒两侧设有警示灯,警示灯用于对船体的充电、启动、停止、变向状态进行监控显示。
24.本说明书还提供一种基于全固态激光雷达的无人水面垃圾清理船工作方法,基于上述任意一项的基于全固态激光雷达的无人水面垃圾清理船,本工作方法包括:
25.启动垃圾清理船,探测设备中的全固态激光雷达采集周围的环境数据,同时检测水面周围目标,将信息传送给控制中心;
26.控制中心根据雷达信息,利用云计算isar算法建立实时的图像信息,根据同时定位与地图构建方案建立湖面地图,确定地图中的障碍物、垃圾和水流流速;
27.根据控制中心反馈的图像信息和地图信息,通过计算机给垃圾清理船规划清理任务,包括路径设置、垃圾选取、边界条件和清理速度,路径设置,用于规划垃圾清理船的行驶轨迹和速度;垃圾选取,用于清理指定目标物;边界条件,用于限制垃圾清理船的活动范围;清理速度,用于控制清理装置的工作频率;
28.当垃圾分类存储区回收至设定量时,控制中心停止清理工作,下达返回指令,使垃圾清理船返回至指定位置;
29.垃圾清理船抵达指定位置后,控制中心下达垃圾分类存储区的清理指令,将堆积的垃圾置放到垃圾清理船外;
30.垃圾全部清理完成后,控制垃圾清理船重新返回水面继续完成规划任务,直至规划任务完成,返回指定停放处。
31.从上面所述可以看出,本说明书一个或多个实施例提供的基于全固态激光雷达的无人水面垃圾清理船,通过在船体上设置清理装置、传动装置,探测设备和控制中心,通过各个装置、系统、设备的协同控制方法,实现湖面上垃圾的清理任务规划,行驶过程通过全固态激光雷达扫描,将信息发送至控制中心,然后控制中心根据信息制定规划任务,本发明的探测设备利用全固态激光雷达技术,适用于湖面各种恶劣环境,扫描精度高、范围广;稳
定性好;提升了无人水面垃圾清理船的适用情况,有效解决了目前垃圾清理船探测清理精度不高的问题。
附图说明
32.为了更清楚地说明本说明书一个或多个实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本说明书一个或多个实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
33.图1为本说明书一个或多个实施例的垃圾清理船整体结构示意图;
34.图2为本说明书一个或多个实施例的垃圾清理船侧视结构示意图;
35.图3为本说明书一个或多个实施例的垃圾清理船背部结构示意图;
36.图4为本说明书一个或多个实施例的垃圾清理船俯视角结构示意图;
37.图5为本说明书一个或多个实施例的太阳能电池片结构示意图;
38.图6为本说明书一个或多个实施例的螺旋桨结构示意图;
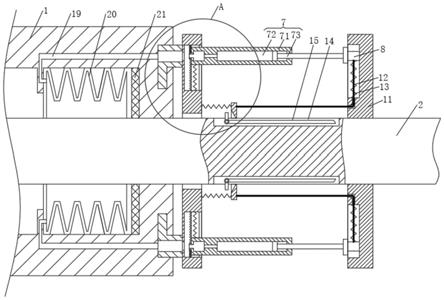
39.图7为本说明书一个或多个实施例的全固态激光雷达结构示意图;
40.图8为本说明书一个或多个实施例的垃圾分类存储区结构示意图;
41.图9为本说明书一个或多个实施例的清理装置结构示意图;
42.图10为本说明书一个或多个实施例的垃圾传送带结构示意图;
43.图11为本说明书一个或多个实施例的动力电机结构示意图;
44.图12为本说明书一个或多个实施例的组合传动装置结构示意图;
45.图13为本说明书一个或多个实施例的垃圾清理船工作方法流程图。
具体实施方式
46.为使本公开的目的、技术方案和优点更加清楚明白,以下结合具体实施例,对本公开进一步详细说明。
47.需要说明的是,除非另外定义,本说明书一个或多个实施例使用的技术术语或者科学术语应当为本公开所属领域内具有一般技能的人士所理解的通常意义。本说明书一个或多个实施例中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。“包括”或者“包含”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
48.本说明书实施例提供一种基于全固态激光雷达5的无人水面垃圾清理船,如图1
‑
4所示,包括船体1、清理装置10、传动装置、探测设备6和控制中心13,其中船体1搭载有驱动其移动的动力装置,并在船体1上设置有用于集中存放垃圾的垃圾分类存储区9,清理装置10安装在船体1上,用于垃圾清理,传动装置用于将清理装置10清理出的垃圾传送至垃圾分类存储区9中,探测设备6安装在船体1前端,包括全固态激光雷达5,全固态激光雷达5用于采集船体1周围的环境数据,并检测水面周围目标,控制中心13用于根据全固态激光雷达5
采集到的信息,处理动力装置、清理装置10和传动装置的执行动作,将水面上的垃圾清理到垃圾分类存储区9中。
49.本说明书实施例提供的基于全固态激光雷达5的无人水面垃圾清理船,通过在船体1上设置清理装置10、传动装置,探测设备6和控制中心13,通过各个装置、系统、设备的协同控制方法,实现湖面上垃圾的清理任务规划,行驶过程通过全固态激光雷达5扫描,将信息发送至控制中心13,然后控制中心13根据信息制定规划任务,本发明的探测设备6利用全固态激光雷达5技术,适用于湖面各种恶劣环境,扫描精度高、范围广;稳定性好;提升了无人水面垃圾清理船的适用情况,有效解决了目前垃圾清理船探测清理精度不高的问题。
50.作为一种实施方式,上述清理装置10包括安装在船体1内部一侧的传输电机19,安装在船体1前端的转动轴1001和组合传动装置20,其中转动轴1001上安装有多个扇叶1002,组合传动装置20一端与传输电机19连接,另一端与转动轴1001连接,即当传输电机19运行时,通过组和传动装置带动转动轴1001转动。
51.举例来说,组合传动装置20包括轮轴201,轮轴201两侧的轮盘分别连接有第一条链202和第二条链的一端,第一条链202的另一端与传输电机19连接,第二条链的另一端与转动轴1001的轮盘相连,如图12所示。
52.作为一种实施方式,清理装置10还包括第一级过滤层1003,第一级过滤层1003为扇叶1002上均匀开设的条形通孔,在转动轴1001带动扇叶1002旋转,对水面上的垃圾进行打捞的过程中,第一级过滤层1003可起到滤水的作用,如图9所示。
53.作为一种实施方式,船体1前侧安装有支架7,转动轴1001设置为两组,分别安装在支架7的两侧,方面对水面上的垃圾进行全面的打捞,提高打捞效率,举例来说,每组转动轴1001上的扇叶1002均设置为四个。
54.作为一种实施方式,传动装置包括垃圾传送带12和齿轮轴21,垃圾传送带12上设置有滤水带1201和阻挡块1202,如图10所示,分别起到滤水和防滑的作用,齿轮轴21包括两个第二轮轴和四个齿轮,分别设置于垃圾传送带12两端,其中一个第二轮轴与传输电机19连接,用于传动整个装置,将垃圾传送至垃圾分类存储区9中,
55.作为一种实施方式,全固态激光雷达5包括相位可调的激光发射器501、3d成像传感器502和旋转台503,如图7所示,用于自主发射激光和接受激光,完成路径识别、物体成像、精准探测的功能。激光发射器501和3d成像传感器502安装在旋转台503上,激光发射器501用于发出激光,3d成像传感器502用于捕捉反射的激光,得到船体1周围的环境数据信息和水面周围目标信息。
56.激光雷达作为一种传感器,其主要功能是将探测到信息传给云计算系统,实现对湖面环境的感知。全固态激光雷达5技术是基于光波相控阵扫描的新型光束指向控制技术,又被称为opa扫描技术。相比于机械式激光雷达、微机电系统(mem)和面阵闪光(flash)技术的雷达,全固态激光雷达5具有无惯性器件、精确稳定、方向可任意控制等优点。
57.作为一种实施方式,垃圾分类存储区9中设置有滤板901,滤板901侧面安装有活动的第一推动块904,滤板901底部安装有第二级过滤层902,第二级过滤层902侧面安装有活动的第二推动块905,滤板901两侧还连接有垃圾回收运输带18,两侧的垃圾回收带另一端分别连接有第一垃圾处理口8和第二垃圾处理口14,第二季过滤层侧面还连接有垃圾回收通道903,如图8所示;
58.垃圾分类存储区9处还安装有摄像头16,控制中心13用于接收摄像头16的检测信息,若判断垃圾达到设定量,则停止清理装置10工作,并控制动力装置将垃圾清理船驱动到指定位置。
59.举例来说,上述指定位置可以是初始位置,也可以是其他指定位置,上述垃圾分类存储区9可设置为l型,上部分一侧开口,下部分旁侧开口,一是利于垃圾分层排放,二是合理运用船体1空间,通过滤板901和第二级过滤层902将垃圾分类存储区9内部空间分隔,顶部空间用于存放体积较大的垃圾,底部空间用于存放体积较小的垃圾,第二过滤层进行进一步滤水,从而实现垃圾分类存储。
60.作为一种实施方式,该垃圾清理船还包括用于提供能源的能源装置,能源装置包括太阳能电池手机版,太阳能电池收集板3包括太阳能电池片301阵列组合和接线盒11,太阳能电池片301如图5所示,接线盒11两侧设有警示灯15,警示灯15用于对船体1的充电、启动、停止、变向状态进行监控显示。
61.在该实施例中,太阳能电池收集板3安装在船顶后端,控制中心13安装在太阳能电池收集板3底部。
62.作为一种实施方式,动力装置位于船体内中部,包括动力电机17、螺旋桨4和浮力气垫2,螺旋桨4包括转动环401和桨叶402,该结构与水平方向呈36
°
环形阵列排布,利于机械转动,节省动力;
63.上述动力电机17包括机座1701、后端盖1702、齿轮1703、线圈组1704、轴承1705、铁芯1706和前端盖1707。
64.本说明书实施例还提供一种基于全固态激光雷达5的无人水面垃圾清理船工作方法,基于上述的基于全固态激光雷达5的无人水面垃圾清理船,本方法包括以下步骤:
65.步骤一:启动垃圾清理船,探测设备6中的全固态激光雷达5首先采集周围的环境数据,同时检测水面周围目标,将信息传送给控制中心13;控制中心13根据雷达信息,利用云计算isar算法建立实时的图像信息,根据同时定位与地图构建(slam,simultaeous localizaation and mapping)方案建立湖面地图,确定地图中的障碍物、垃圾、水流流速。
66.步骤二:根据控制中心13反馈的图像信息和地图信息,通过计算机给垃圾清理船规划清理任务,包括路径设置、垃圾选取、边界条件、清理速度、电池监控。路径设置,用于规划垃圾清理船的行驶轨迹和速度;垃圾选取,用于清理指定目标物;边界条件,用于限制垃圾清理船的活动范围;清理速度,用于控制清理装置10的扇叶1002旋转速度;电池监控,用于判断垃圾清理船太阳能电池板是否为充电、放电。
67.步骤三:当垃圾分类存储区9回收至一定量时,由船内部平行于垃圾分类存储区9的摄像头16检测。若堆积满时,将信息至控制中心13,使控制中心13停止清理工作,下达返回指令,返回至指定位置。
68.步骤四:垃圾清理船抵达指定位置,经全固态激光雷达5扫描确定后,控制中心13下达垃圾分类存储区9的清理指令,这时启动第一推动块904和第二推动块905,同时打开垃圾回收运输带18、垃圾回收通道903、第一垃圾处理口8和第二垃圾处理口14,将堆积的垃圾置放到外面。
69.步骤五:垃圾全部清理完成后,重新返回水面继续完成规划任务。
70.步骤六:规划任务完成,返回至指定停放处,再次处理垃圾,根据电量监控决定是
否需要充电。
71.本发明船体结构为半封闭式,用于保护内部电机和防止机械腐蚀;动力装置是通过电机带动螺旋桨为无人船提供航行动力;清理装置位于船体前端,航行过程中通过扇叶转动机制将垃圾推送到传送带上;传动装置是通过传送带将垃圾运送到垃圾存储分类区;能源装置是利用太阳能板的光电转化为无人船提供电源和存储电源;探测设备是通过全固态激光雷达对周围水面环境和障碍物进行探测,其中包括图像采集、路径识别、目标测距以及流速检测;控制系统通过数据交叉处理,集中处理各装置的执行动作和下达信息指令,具有以下有益效果:
72.1)本发明通过各个装置、系统、设备的协同控制方法,实现湖面上垃圾的清理任务规划。行驶过程通过全固态激光雷达扫描,将信息发送至控制中心,利用云计算isar算法,完成图像采集,再根据simultaeous localizaation and mapping(slam)方案建立湖面地图;然后控制中心根据信息制定规划任务;最后通过摄像头检测,解决为完成任务之前垃圾分类存储区的垃圾堆积问题,实用性较高,易于操作。
73.2)本发明的能源设置采用太阳能电池板,避免了环境污染,符合环保生态理念。
74.3)本发明的探测设备利用全固态激光雷达技术,适用于湖面各种恶劣环境,扫描精度高、范围广;稳定性好;提升了无人船的适用情况。
75.4)本发明的垃圾处理简易高效,采取旋转 传动的工作方式将垃圾送至垃圾分类存储区;垃圾分类存储区设计为l型,上部分一侧开口,下部分旁侧开口,一是利于垃圾分层排放,二是合理运用船体空间。
76.所属领域的普通技术人员应当理解:以上任何实施例的讨论仅为示例性的,并非旨在暗示本公开的范围(包括权利要求)被限于这些例子;在本公开的思路下,以上实施例或者不同实施例中的技术特征之间也可以进行组合,步骤可以以任意顺序实现,并存在如上所述的本说明书一个或多个实施例的不同方面的许多其它变化,为了简明它们没有在细节中提供。
77.另外,为简化说明和讨论,并且为了不会使本说明书一个或多个实施例难以理解,在所提供的附图中可以示出或可以不示出与集成电路(ic)芯片和其它部件的公知的电源/接地连接。此外,可以以框图的形式示出装置,以便避免使本说明书一个或多个实施例难以理解,并且这也考虑了以下事实,即关于这些框图装置的实施方式的细节是高度取决于将要实施本说明书一个或多个实施例的平台的(即,这些细节应当完全处于本领域技术人员的理解范围内)。在阐述了具体细节(例如,电路)以描述本公开的示例性实施例的情况下,对本领域技术人员来说显而易见的是,可以在没有这些具体细节的情况下或者这些具体细节有变化的情况下实施本说明书一个或多个实施例。因此,这些描述应被认为是说明性的而不是限制性的。
78.本说明书一个或多个实施例旨在涵盖落入所附权利要求的宽泛范围之内的所有这样的替换、修改和变型。因此,凡在本说明书一个或多个实施例的精神和原则之内,所做的任何省略、修改、等同替换、改进等,均应包含在本公开的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。