技术特征:
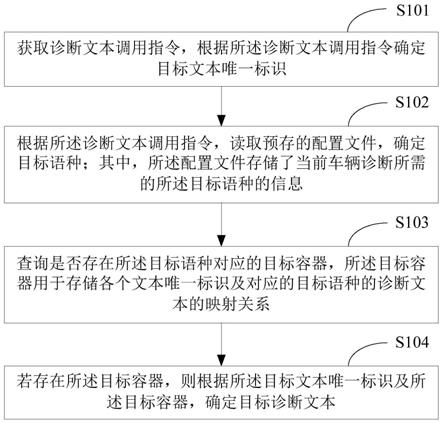
1.一种基于模拟退火算法和模糊pid的元动作单元转速控制方法,其特征在于,将整机按照功能进行结构化分解至子系统,再将各子系统按照“功能—运动—动作”的步骤逐步分解到元动作单元层,以蜗杆转动元动作单元为被控对象,通过速度传感器对蜗杆转动元动作进行转速采集,并计算其平均值,作为系统反馈环节的输入,由比例环节、积分环节和微分环节构成pid控制器算法,调节转速趋向于设定值。2.根据权利要求1所述基于模拟退火算法和模糊pid的元动作单元转速控制方法,其特征在于,所述蜗杆转动元动作单元包括支撑件、动力源、执行件、中间传动和连接件。3.根据权利要求2所述基于模拟退火算法和模糊pid的元动作单元转速控制方法,其特征在于,所述基于模拟退火算法和模糊pid的元动作单元转速控制方法的具体计算过程如下:首先给出目标转速u,模糊id控制器算法包括模糊控制规则和隶属度函数,通过模糊控制算法对pid控制器算法中的积分系数和微分系数进行整定,在线计算第n时刻积分系数的增量δki(n)和微分系数的增量δkd(n);1)输入输出的模糊化:选择蜗杆转动元动作单元转速偏差e(n)与其导数ec(n)作为模糊控制器的输入变量,经量化因子作用后输入模糊控制器得到模糊化变量e(n)和ec(n);2)模糊论域、模糊语言值,隶属度函数的确定:首先,给出转速偏差e(n)、转速偏差变化率ec(n)的模糊论域、模糊语言值,为了让速度切换更加细腻流畅,设置转速偏差e(n)、转速偏差导数ec(n)和控制量u的基本论域为[
‑
6,6],并划分为13个等级,即{
‑
6,
‑
5,
‑
4,
‑
3,
‑
2,
‑
1,0,1,2,3,4,5,6},模糊语言值{负大,负中,负小,零,正小,正中,正大},即{nb,nm,ns,o,ps,pm,pb},所用隶属度函数为三角隶属函数;接着,给出积分系数增量δki的模糊论域和模糊语言值,设计隶属度函数:给出积分系数增量δki的模糊论域为{
‑
0.3,
‑
0.25,
‑
0.2,
‑
0.15,
‑
0.1,
‑
0.05,0,0.05,0.1,0.15,0.2,0.25,0.3},模糊语言值为{负大,负中,负小,零,正小,正中,正大},即{nb,nm,ns,o,ps,pm,pb};制定积分系数增量δki的模糊控制规则:根据转速偏差e(n)、转速偏差变化率ec(n)的模糊语言值,制定二者组合情况下δki的控制规则,所用隶属度函数为三角隶属函数;给出微分系数增量δkd的模糊论域和模糊语言值,设计隶属度函数:给出微分系数增量δkd的模糊论域为{
‑
0.42,
‑
0.35,
‑
0.28,
‑
0.21,
‑
0.14,
‑
0.07,0,0.07,0.14,0.21,0.28,0.35,0.42},模糊语言值为{负大,负中,负小,零,正小,正中,正大},即{nb,nm,ns,o,ps,pm,pb};制定微分系数增量δkd的模糊控制规则:根据转速偏差e(n)、转速偏差变化率ec(n)的模糊语言值,制定二者组合情况下δkd的控制规则;所用隶属度函数为三角隶属函数。4.根据权利要求2或3任一项所述基于模拟退火算法和模糊pid的元动作单元转速控制方法,其特征在于,模糊推理是以转速偏差e(n)与其导数ec(n)作为模糊控制器的输入变量,pid调节器的id参数是转速偏差e(n)与其偏差变化率ec(n)的非线性函数,具体可记为:其中,和分别表示id参数中的积分,微分的初始值,e
n
δk
i
和(e
n
ec
n
)δk
d
分别表示经模糊推理和解模糊化后的到的调整pid中的积分和微分变化量,整定可以得出n时刻积
分系数ki(n)和微分系数kd(n)。5.根据权利要求3所述基于模拟退火算法和模糊pid的元动作单元转速控制方法,其特征在于,通过速度传感器对蜗杆转动元动作单元的转速进行采集,并计算其平均值,作为目标转速u。6.根据权利要求3所述基于模拟退火算法和模糊pid的元动作单元转速控制方法,其特征在于,给出kp控制规则,比例环节控制规则为当模糊化后的转速偏差对应的语言值变量为负小、零或正小,模糊化后的转速偏差变化率对应的语言值变量为负大、负中、正中或正大,并且转速偏差变化加速度为零时,则增大pid控制单元微分环节益。7.根据权利要求6所述基于模拟退火算法和模糊pid的元动作单元转速控制方法,其特征在于,确定kp时,把ki和kd设为0,不要积分与微分,把kp值从0开始慢慢增大,观察压力的反应速度,当压力的反应速度达到要求,停止增大kp值,假设此时为状态a,对状态a时的kp结合ki和kd做模拟退火算法。8.根据权利要求7所述基于模拟退火算法和模糊pid的元动作单元转速控制方法,其特征在于,假设前一个状态为x(n),系统根据某一指标(梯度下降,上节的状态),状态变为x(n 1),相应的,kp的状态由v(n)变为v(n 1),定义系统由x(n)变为x(n 1)的接受概率p为:e(n)表示n时刻的转速偏差输出,e(n 1)表示n 1时刻转速偏差输出。9.根据权利要求8所述基于模拟退火算法和模糊pid的元动作单元转速控制方法,其特征在于,如果误差减小了,转移就被接受;如果误差增大了,说明系统偏离全局最优值位置更远了,此时算法不会立刻将其抛弃,而是进行概率操作:首先在区间[0,1]产生一个均匀分布的随机数,如果p,则转移接受,否则拒绝转移,进入下一步,往复循环;其中p以误差的变化量和v进行决定概率kp以及e(n)的大小,所以kp这个值是动态的。
技术总结
本发明属于机械与控制交叉领域,公开了一种基于模拟退火算法和模糊PID的元动作单元转速控制方法,首先,在进行转速控制之前,将整机分解到子系统,再从子系统分解到元动作单元进行控制;通过速度传感器对蜗杆转动元动作单元采集转速,通过控制器对电机转速进行设置,设计模糊ID控制器算法的控制规则表、模糊论域、模糊语言值、隶属度函数,实现积分系数、微分系数的整定;利用模拟退火算法对转速P控制器比例因子智能寻优,结合PID的试凑法确定最优值,能够对蜗杆转动元动作单元的转速进行精确控制,具有良好的动静态特性,提高了电机转动时的稳定性。的稳定性。的稳定性。
技术研发人员:葛红玉 罗天宇 郭玉娇
受保护的技术使用者:西安科技大学
技术研发日:2021.08.11
技术公布日:2021/11/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。