基于区间二型t
‑
s模糊的欺骗攻击下的网络控制方法
技术领域
1.本发明属于控制科学与控制工程领域,具体涉及基于区间二型t
‑
s模糊模型的欺骗攻击下的网络控制方法。
背景技术:
2.随着开放但不受保护的通信网络的普遍使用,其中网络安全系统越来越容易受到各种恶意攻击者的攻击。据报道,一次成功的网络攻击可能会导致非常严重的后果,包括客户信息泄露,基础设施破坏,甚至危及生命。因此,网络控制系统(ncs,network control system)的安全问题引起了越来越多的关注,其中,欺骗攻击是最重要的网络攻击之一,欺骗攻击,也被称为虚假数据注入攻击,攻击者通过网络发送虚假的控制输入信号,改变数据信息的真实性或者完整性,降低甚至恶化系统的性能,这对控制系统来说,威胁性是相当大的。越来越多的注意力被用于探索欺骗攻击,因此我们需要寻找一种新的方法来改善网络控制系统。
3.区间二型t
‑
s模糊控制系统是研究非线性系统的热门方向之一。区间二型t
‑
s模糊控制系统的优点在于:(1)区间二型t
‑
s模型相较于传统的一型t
‑
s模型具有更好的处理不确定信息的能力;(2)区间二型t
‑
s模型比二型t
‑
s模型在计算方面更具有优势,且还拥有二型 t
‑
s模型的优点。现有技术大多是对一型t
‑
s模糊控制系统的研究,对区间二型t
‑
s模糊控制系统的研究还很少。因此区间二型t
‑
s模糊网络控制系统在实际应用中受到越来越多的关注,吸引越来越多的学者研究。
技术实现要素:
4.针对现有技术的不足,本发明提出了基于区间二型t
‑
s模糊模型的欺骗攻击下的网络控制方法,设计了一种内存事件触发方案,在降低通信资源占用的同时维持系统性能。采用随机发生的欺骗攻击模型,结合内存事件触发方法构建了网络控制系统模型,实现针对欺骗攻击的网络系统的安全控制。
5.基于区间二型t
‑
s模糊模型的欺骗攻击下的网络控制方法,具体包括以下步骤:
6.步骤一、建立基于区间二型t
‑
s模型的网络控制系统模型
7.建立欺骗攻击下的网络系统的数学模型:
[0008][0009]
其中,表示网络系统的状态,为系统状态变量,为控制输入向量,φ(t)为初始向量值函数。a
i
、b
i
是具有适当维数的常数矩阵。
[0010]
利用区间二型t
‑
s模型的if
‑
then规则描述欺骗攻击下网络系统的数学模型:
[0011][0012]
其中,n
ai
是前提变量θ
a
(x(t))在第i条规则下的模糊集,a=1,2,
…
,r,i=1,2
…
,r;在系统初始状态下,控制输入向量u(t)=0,初始向量值函数φ(t)∈[
‑
τ
m
,0),τ
m
,t
m
是已知常数标量。
[0013]
步骤二、网络系统模型去模糊化
[0014]
在步骤一建立的欺骗攻击下网络系统的数学模型中加入隶属度函数,对模型(2)进行去模糊化:
[0015][0016][0017]
其中,分别为前件变量θ
a
(x(t))隶属度的上限与下限,是第i条规则激活强度的取值范围,活强度的取值范围,是系统不确定相关的非线性函数,且满足
[0018]
作为优选,去模糊化的方法为单点模糊化、乘积推理或中心平均。
[0019]
步骤三、设计内存事件触发条件
[0020]
将零阶保持的持续区域t∈ω划分成多个采样间隔子集ω
l
:
[0021][0022]
采样间隔子集表示从当前控制器最新数据传递时刻t
k
h到下一个最近的传递时刻t
k 1
h之间的采样间隔点,数据包x(t
k
h)、x(t
k 1
h)的传输延迟分别为
[0023]
定义t时刻网络系统的时滞大小为:
[0024]
其中是传输延迟的上限。设计当预先设置好的事件触发条件被打破时,事件触发器将触发新事件,因此内存事件触发条件描述为:
[0025][0026]
其中,σ为阈值参数,w>0为权重矩阵;e
i
是当前采样时刻的系统状态x(t
k
‑
i 1
h)与最新传递数据的状态x(t
k
h lh)之间的状态误差。根据公式(6)描述的内存事件触发条件得到下一个事件触发时刻t
k 1
h为:
[0027]
[0028][0029]
其中,为加权参数。通过设置阈值参数σ的值,可以更改事件的触发频率。阈值参数σ的值越小,事件触发的次数越多。当阈值参数σ的值小到接近与0时,事件触发将趋近于时间触发。
[0030]
步骤四、设计状态反馈控制器
[0031]
基于步骤三的内存事件触发条件,采用并行分布补偿法设计状态反馈控制器,利用区间二型t
‑
s模型的if
‑
then规则描述如下:
[0032][0033]
其中,k
j
是第j个控制规则的反馈增益矩阵,j=1,2,
…
,r;h是信号的采样周期。
[0034]
将公式(7)、(8)带入到公式(9),状态反馈控制器的全局模型为:
[0035][0036]
令得到如下闭环控制系统:
[0037][0038]
步骤五、设计欺骗攻击模型
[0039]
在每个数据传输的时刻,事件发生器封装m个历史传输信号{x(t
k
h),...,x(t
k
‑
m 1
h)},并将 m个历史传输信号与当前时刻传输信号一同发送给控制器,因此在随机欺骗攻击下的网络控制模型为:
[0040][0041]
其中θ(t)∈{0,1}表示欺骗攻击发生的概率,当θ(t)=0表示没有攻击,当θ(t)≠0时,原始信号{x(t
k
h),...,x(t
k
‑
m 1
h)}被攻击者捕获,并被一组攻击性信[f1(x(t
‑
d(t)),
…
,f
m
(x(t
‑
d(t))] 代替。攻击信号f
i
(x(t
‑
d(t))i∈{1,2,...,m}满足:||f
i
(x(t
‑
d(t))||2≤||g
i
x(t
‑
d(t)||2,其中g
i
表示攻击信号f
i
(x(t
‑
d(t))上限的相应已知矩阵,g
max
是g
i
中的最大一个,且0≤d(t)≤d
m
。
[0042]
步骤六、求解控制器增益
[0043]
求解系统在随机发生的欺骗攻击模型下的渐近稳定条件,得到状态反馈控制器增益,实现基于区间二型t
‑
s模糊模型的欺骗攻击下的网络控制。
[0044]
本发明具有以下有益效果:
[0045]
1、把网络攻击与区间二型模糊系统相结合,提高处理不确定性方面的能力,更符合实际情况,在实际应用场景中可以提高控制精度。
[0046]
2、利用区间二型t
‑
s模型描述运动过程,使用区间二型模糊集函数对服务攻击的网络控制系统系统建模,在降低整体计算复杂程度的同时,还能更精确得对系统进行描述,提高控制方法的有效性。
[0047]
3、采用事件触发控制器可以有效降低控制能耗,减轻网络系统负载,对控制信道的带宽要求降低,并可应用于分布式控制器的设计中。
附图说明
[0048]
图1为实施例中不同系统状态的响应曲线;
[0049]
图2为欺骗攻击下事件触发的状态响应曲线;
[0050]
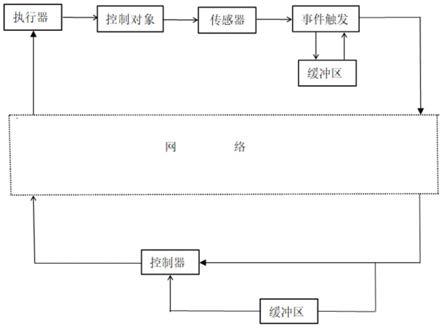
图3是欺骗攻击下的事件触发网络系统结构图。
具体实施方式
[0051]
以下结合附图对本发明作进一步的解释说明;
[0052]
基于区间二型t
‑
s模糊模型的欺骗攻击下的网络控制方法,具体包括建立欺骗攻击下的网络系统的数学模型:
[0053][0054]
其中,i=1,2。利用区间二型t
‑
s模型的if
‑
then规则描述欺骗攻击下网络系统的数学模型:
[0055]
rule 1:ifθ1(x(t))is n
1i then
[0056][0057]
x(t)=φ(t)
[0058]
rule 2:ifθ2(x(t))is n
2i then
[0059][0060]
x(t)=φ(t)
[0061]
定义:
[0062]
引理一:对于满足任意正定对称矩阵r∈r
n
×
n
,标量d1,d2满足d1≤d2,向量函数ω(t)使得下述积分有定义,则有:
[0063][0064]
引理二:若矩阵a,b,c,具有适当维数,且b=b
t
,则以下三个命题等价:
[0065]
(1):
[0066]
(2):a<0,c
‑
ba
‑1b
t
<0
[0067]
(3):c<0,a
‑
b
t
c
‑1b<0
[0068]
定理1:对于给定标量t
m
≥t
m
≥0,σ,m,u
α
,θ,如果存在适当维数的矩阵 p>0,q1>0,q2>0,r1>0,r2>0,z1>0,z2>0,w>0,n,m,s,t,k
α
,α∈{1,...,m},
[0069]
则闭环控制系统(11)渐近稳定。
[0070][0071][0072]
p
11
=ξ l l
t
,ξ=[ξ
ij
]4×4,
[0073][0074][0075]
ξ
22
=diag{
‑
q
1,
0,
‑
q2},
[0076][0077][0078][0079][0080][0081][0082][0083]
π
51
(1)=z1f1,∏
51
(2)=z2f2,
[0099][0100][0101][0102][0103][0104][0105][0106][0107][0108][0109][0110][0111][0112][0113][0114][0115]
根据定理一、二,使用matlab软件中的lmi工具求得状况控制器增益的可行解为: k1=[1.4966 6.6060]、k2=[1.2446 5.5255]。
[0116]
系统不同状态下的响应曲线如图1所示,可以看出系统是渐近稳定的。图2为欺骗攻击下事件触发的状态响应曲线;图3是欺骗攻击下的事件触发网络系统结构图。
[0117]
对定理一的证明:
[0118]
证明如下:
[0119]
构造如下李雅普诺夫函数:
[0120][0121]
从和f
i
(x(t
‑
d(t))以及触发算法的定义可以看出,根据f
i
(x(t
‑
d(t))的定义,存在以下不等式:
[0122][0123]
定义无穷小算子:
[0124]
取式(15)两边的期望,得到:
[0125]
[0126][0127]
其中:
[0128][0129][0130][0131][0132][0133]
对的最后两个积分项分别用引理2可得:
[0134]
[0135][0136]
定义:得到:
[0137][0138]
其中:i=1,2,j=3,4
[0139]
使用引理2,可以从(13)和(14)中得到:e(l(v(t)))<0,完成对引理一的证明。
[0140]
对定理二的证明:
[0141]
证明:定义x=p
‑1,对角矩阵的转置,定义新的矩阵变量
[0142]
对(10)和(11)左乘右乘这个对角矩阵的转置,定义新的矩阵变量
[0143]
可得(15)和(16),即完成对引理二的证明。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。