1.本发明涉及一种根据权利要求1的前序部分所述的用于确定绝对旋转角度的角度测量装置或位置编码器。
背景技术:
2.从现有技术中已知还能够进行多转检测的编码器。如果轴进行一次以上的完整旋转,则只有在旋转过程中进行检测时才能测量绝对旋转,因为由于周期性,在一次完整旋转之后会再次到达轴上的某个位置,并且在进一步旋转过程中同样还会周期性地到达该位置。因此,在绝对角度检测过程中,所讨论的传感器装置必须被永久地供应能量,例如连接到电压源,在该绝对角度检测中,还对在某一时期内执行的完整回转数进行计数。
3.例如,de 10 2009 084 389 b4描述了一种具有磁体布置的位置传感器,用于所谓的多转检测,所述传感器特别适合在特别小的安装空间中用作位置传感器。为此目的,设置通量引导元件以引导磁场线,并且尽管安装空间小,但仍防止一个以上传感器元件受到同一磁体的影响。尤其是当装置关闭时,因此一般需要细密的电气措施,以便也能够检测绝对旋转角度的变化。特别地,为此目的使用电池供电的或其他能量自主的检测系统,但是,这意味着这些系统的使用寿命也很有限,并且一定时间后必须更换比如电池等电压源。附加地,这种电气系统经常也非常依赖于环境温度。因此,这些系统通常不适合于低成本应用。
技术实现要素:
4.相应地,本发明的任务是能够提出一种简化的低成本角度测量装置,通过该角度测量装置,所谓的多转检测也是可能的。
5.该任务通过权利要求1的特征解决,这些特征从上述类型的角度测量装置开始。
6.由于在从属权利要求中指定的措施,本发明的有利的实施例和其他形式是可能的。
7.本发明涉及的角度测量装置基本上可以用作用于确定绝对旋转角度的旋转编码器或位置编码器。一方面,该角度测量装置可以直接连接到驱动轴上,以便在必要时高分辨率地记录轴的回转数或速度;但是,该角度测量装置在关闭时还可以用于存储绝对回转数。本发明涉及的角度测量装置的特征是其可以使用绝对旋转角度的机械存储,这意味着不必向检测系统永久供电。
8.为此目的,本发明涉及的角度测量装置包括产生磁场并围绕第一旋转轴线可旋转地安装的励磁元件(field element)。附加地,励磁元件绕第二旋转轴线可旋转地安装,该第二旋转轴线与第一旋转轴线不重合,而是与第一旋转轴线偏移,使得励磁元件也可以在旋转平面中绕第二旋转轴线旋转。根据本发明的实施例,第一旋转轴线和第二旋转轴线可以彼此平行地对准,这对于角度测量装置的小型化是特别有利的。
9.但是,也可以想到的是,第一旋转轴线和第二旋转轴线应相对于彼此倾斜。例如,可想到励磁元件在圆锥体的外表面上围绕其纵轴旋转的实施例的变型。
10.此外,设置了具有至少两个传感器的传感器阵列,所述传感器相对于旋转平面偏移地定位,使得它们不与励磁元件碰撞。励磁元件产生的磁场、特别是其位置和取向由传感器阵列检测。
11.相应地,传感器被设计为通过测量由励磁元件产生的、随励磁元件在旋转平面中的位置而变和/或随励磁元件绕第一旋转轴线的南北极取向而变的磁场,以基于所产生的磁场来确定励磁元件在旋转平面中的位置及其相对于其南北极取向的取向。因此,传感器阵列即使彼此机械地彼此独立联接,也可以基本上确定绕第一旋转轴线和第二旋转轴线的两个旋转运动。为了精确地确定位置和取向,设置了位于不同位置的传感器阵列中的至少两个传感器。
12.这种测量技术允许磁场的变化,特别是旋转过程中磁场的取向变化来描述不同的比例或不同的旋转角度范围和旋转角度分辨率,这取决于这些变化是由围绕第一旋转轴线的固有旋转引起的还是由围绕第二旋转轴线的旋转引起的。例如,绕第一旋转轴线的旋转可以提供非常小的旋转角度的高分辨率,而绕第二旋转轴线的旋转描述较大的旋转角度。
13.在本发明的特别有利的实施例中,励磁元件被设计为永磁体或包括永磁体,与电磁体相比,永磁体不需要其自身的电源。因此,这样的实施例也适合在没有电源的操作中使用。最重要的是,可以节省成本,并且也不需要更换电池等。使用所谓的径向磁体是特别有利的。可以有利地将这个径向磁体定位成使得其在其表面区域内具有磁极的南北取向。如果径向磁体绕垂直于其表面区域的旋转轴线旋转,则这个径向磁体可以根据南北取向(north
‑
south orientation)绕旋转轴线旋转。这样,可以检测到旋转期间磁场的特别强烈的变化,使得提高了装置的准确度和分辨率。附加地,径向磁体的特征是其是特别紧凑的单元并且不必由单独的励磁元件(比如多个永磁体)组装而成。
14.在如下实施例中可以实现特别简单且紧凑的设计,在该实施例中,第一旋转轴线与穿过励磁元件的中心点的纵轴线重合或者垂直于励磁元件的表面区域并且穿过中心点延伸和/或延伸穿过励磁元件的北极与南极之间的主轴线并穿过励磁元件的几何中心延伸。当围绕第一旋转轴线旋转时,励磁元件将进行自转。与第一旋转轴线偏移的第二旋转轴线也可以根据其大小有利地延伸到励磁元件的外部。因此,励磁元件可以例如进行与地球围绕太阳的旋转相似的旋转,即绕其第一旋转轴线进行固有旋转,并且绕其第二旋转轴线进行旋转运动。两个旋转运动有利地具有的旋转运动关于要测量的旋转运动的增速(step
‑
up)传动具有不同的比例、特别是增速和减速传动与彼此相比处于足够不同的比例。通过减速传动,旋转运动转化为较慢的旋转运动,这尤其可以通过绕第二旋转轴线的旋转来实现。这使得可以通过减小比例来测量大量的旋转,而不会发生所谓的“过流”,并且实际进行的旋转数不会超出实际检测范围。在1:1传动的情况下,最晚在一个周期之后,将不再可能确定在大于2π的角度范围内是否发生了多转旋转。另一方面,较小的旋转可以被转化,其方式是使得可以以足够的精度和高分辨率检测到较小的旋转;旋转、特别是励磁元件绕第一旋转轴线的固有旋转合适于此。
15.以有利的方式,本发明涉及的角度测量装置的特征是甚至在关闭时和没有任何电源的情况下旋转的机械存储也是可能的。如果进行旋转,则所提出的磁体布置可以被设置成处于运动。例如,通过围绕第二旋转轴线的旋转来检测所谓的多转运动中的旋转的整数倍,而通过磁体围绕第一旋转轴线的旋转来转化较小的旋转。避免了过流,并且否则由于旋
转运动的周期性而会丢失的信息被机械地存储,因为在旋转之后,励磁元件的位置相对于初始状态已经改变。
16.这样的位置传感器的实现例如通过设置壳体和齿轮单元来实现,其中,励磁元件被安装为通过齿轮单元相对于壳体可绕第一旋转轴线或第二旋转轴线旋转。在本发明的进一步发展中,行星齿轮或沃尔夫罗姆齿轮(wolfrom gear)特别有利地适合于此目的。在行星齿轮单元中,有一些轴在框架中在圆形路径上旋转。这样,可以有利地在相对小的空间中紧凑地进行不同的旋转运动。
17.附加地,这样的行星齿轮的特征还在于这些行星齿轮可以以节省空间的方式级联,其中可以选择减速(step
‑
down)传动的程度,并且可以根据需要基本上扩大所谓的多转检测的范围。将齿轮箱设计成级联的齿轮单元是特别有利的,因为这能够实现基本上任何大小的减速比。这意味着实际上可以随意扩展可以进行测量且不会发生过流的比例范围。行星齿轮可以被设计为减速联接齿轮单元,即所谓的沃尔夫罗姆齿轮单元。设计为沃尔夫罗姆齿轮单元允许同轴齿轮箱的结构特别紧凑的设计并具有较高的增速比或减速比。
18.然而,为了能够检测励磁元件的定位或取向的变化,必须将当前位置或取向与起始位置/取向相互比较。原则上,可以以有利的方式设置评估装置,以便检测由传感器阵列确定的励磁元件在旋转平面和其南北极取向上的位置,并将其相应地转换为回转数。据此,可以确定这两个时间点之间的相对角度位置和相对角度取向(第一时间点是起始状态,第二时间点是当前状态),每个角度范围介于0与2π之间。附加地,在第一时间点与第二时间点确定相对多转位置,这也提供关于在此过渡期内发生了多少整数回转数的信息。
19.第一时间点时的原始位置可以是固定的。在这一点上,例如,可以通过定位励磁元件来进行校准,其方式是使得它们的位置以及因此对应地产生的磁场是提前已知的。还可想到,评估单元的设计方式应使得使评估成为可能的数学计算规则或分配规则已经将预定义的原始位置考虑在内。
20.但是,也可考虑的是,例如应该将在第一时间点时的第一位置记录在评估单元的存储器中,并且在评估过程中应当将当前的测量值与原始测量值进行比较。可以分开测量原始时间点时的对应原始位置并将其记录在固定存储器中,然后在对应时间段之后的评估时间点立即对其进行评估。在有利的变型中,可想到通过记录位置或原始字段来提供只读存储器(rom)。
21.取决于励磁元件的预期场特性,传感器可以例如被设计为一维或多维磁场传感器。一方面,在此可以节省成本,另一方面,使用多维磁场传感器可以特别好地并且精确地记录励磁元件的对准,使得可以提高特别是分辨率和准确度。
22.本发明的特征还在于仅用一个单一励磁元件就可以完成。即使要测量许多次旋转,也仍然可以实现良好的分辨率,例如,通过使用级联齿轮单元,将多转运动的超限度设置为最大可能的旋转数。
23.为了能够制造紧凑的装置,壳体可以连接到齿圈,即,齿圈相对于壳体是固定的,其中齿圈容纳行星齿轮单元的至少一部分。因此,通过齿圈的安装在内部的齿轮轮廓,壳体甚至在相应高转矩的情况下也可以直接将机械力或旋转运动传递到齿轮单元,使得角度测量装置也可以足够灵敏地工作。
24.励磁元件可以特别地固定在公转轮的中心,例如被夹紧在(由塑料制成的)公转轮
中或模制在其周围,使得励磁元件和公转轮可以进行一起绕第一旋转轴线或第二旋转轴线的旋转。因此,将转矩传递到公转轮上会直接引起励磁元件的旋转,并触发磁场的变化,即关于励磁元件的取向及关于其相对于齿圈的位置,使得这可以直接准确地检测到。附加地,该装置需要很少的部件来实现实际的测量物理学,这意味着该装置更紧凑,机械系统非常简单,并且因此可以节省成本。
25.进而,在本发明的实施例中,齿轮单元可以包括太阳齿轮,该太阳齿轮直接或间接地机械地联接到行星齿轮单元。相反,但是这种太阳齿轮也可以联接到旋转编码器中的轴。轴可以连接到驱动器上,使得可以通过旋转运动来测量转速。
26.传感器中的至少两个传感器可以位于围绕第二旋转轴线的圆上,其中位于该圆上的传感器与第二旋转轴线的距离可以小于或等于第一旋转轴线与第二旋转轴线的距离。因此,如果传感器位于圆上距第二旋转轴线的距离与距励磁元件的中心(或第一旋转轴线)的距离相同,则励磁元件会在其在变速箱中移动时掠过传感器。
27.角度测量装置的分辨率可以通过选择驱动轮与公转轮之间的传动比来以有利的方式被确定。
28.励磁元件绕第二旋转轴线在圆上移动。但是,如果传感器位于这个圆内且与第二旋转轴线的距离较小,则可以避免励磁元件与传感器之间的最大可能距离应与在该距离应恰好与第一和第二旋转轴线的距离一样大的情况一样大。这也可以用于实现分辨率与测量信号之间的优化。如已经描述的那样,本发明特别适合作为精密旋转编码器,但是也适合作为用于机械存储的多转位置编码器而不需要具有(独立的)电压源的永久运行的检测装置。
29.本发明的特征还在于,其可以连接至具有不变的基本结构的旋转轴,以用作旋转编码器,但同时也用作用于在断电时测量旋转运动的位置编码器。
附图说明
30.本发明的实施例在附图中被示出,并且在下面与进一步的细节和优点一起被更详细地说明。具体地:
31.图1:示出了根据本发明的角度测量装置的设计的示意图,
32.图2:根据本发明的角度测量装置的实施例的变型,
33.图3、图4:根据图1和图2和图5的角度测量装置的不同的传感器布置,以及
34.图5:根据本发明的具有级联齿轮单元的角度测量装置。
具体实施方式
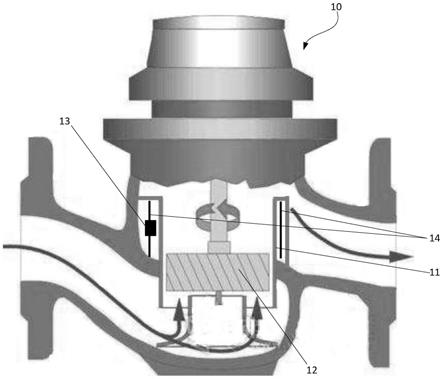
35.图1示出了根据本发明的角度测量装置1的结构的示意图,其具有牢固地安装在行星轮30中的径向磁体2作为励磁元件。行星轮30具有公转轮3的功能。公转轮3一方面与齿圈4啮合,另一方面与太阳齿轮5啮合。太阳齿轮5驱动公转轮3,并因此使径向磁体2绕第一旋转轴线7旋转。在固定齿圈4的情况下,公转轮3绕第二旋转轴线6移动。
36.此外,如图3所示,传感器阵列设置有至少两个传感器10、11、12,这些传感器相对于旋转平面8偏移定位。
37.传感器阵列适于通过测量径向磁体2产生的、随径向磁体2在旋转平面8(见图3)中的位置而变并且随径向磁体2绕第一旋转轴线7的南北极取向而变的磁场来确定径向磁体2
在旋转平面8(见图3)中的位置及其相对于其南北极取向(图1所示)的取向。
38.图2示出了本发明涉及的角度测量装置1的实施例,其具有作为励磁元件的径向磁体2,该径向磁体永久地安装在公转轮3(中间轮)中。公转轮3通过轴承与行星齿轮30啮合,该行星齿轮一方面与齿圈4啮合,另一方面与太阳齿轮5(中心轮)啮合,使得它们彼此机械地联接。太阳齿轮5可旋转地安装在旋转轴线6上。由齿圈4组成的居中安装在所安装的太阳齿轮5的轴线6上(轴线6与太阳齿轮5的旋转轴线重合)的齿轮布置与行星齿轮30一起形成行星齿轮单元。在所示的示例中,齿圈4是固定的(与壳体相对),而太阳齿轮5是被驱动的。齿圈4例如连接至壳体。当太阳齿轮5被驱动时,具有永磁体2的公转轮3因此可以在齿圈4中旋转。公转轮3由驱动轮32驱动,并且其自身围绕旋转轴线7旋转,因此磁体2也围绕该旋转轴线旋转。旋转轴线7和旋转轴线6彼此平行对准。太阳齿轮5和公转轮3移动的平面是共用旋转平面8。
39.当径向磁体2绕第一旋转轴线7旋转时,径向磁体2的南北取向相应地在旋转平面8中旋转。同时,公转轮3与径向磁体2一起绕轴线6旋转。如果太阳齿轮5旋转并且牢固地连接至齿圈4的壳体是固定的,则公转轮3与磁体2一起移动,使得径向磁体2位于的位置和同时其南北对准可以相应地被确定。因此,径向磁体2的南北取向平行于旋转平面8也是有利的。
40.公转轮3以及因此还有径向磁体2绕旋转轴线7的旋转由旋转轮3相对于驱动轮32的传动比确定。
41.角度测量装置的分辨率可以通过选择驱动轮32与公转轮3之间的传动比来确定。这也具有可以具体地调节角度测量装置的准确度和分辨率的优点。
42.另一方面,围绕旋转轴线6的旋转代表了到较慢旋转的减速比,使得也可以检测到多次旋转。公转轮3的位置变化或径向磁体2的磁场变化代表(机械地)存储的对回转数进行编码的信息。
43.此外,如果要确定连接至太阳齿轮5或驱动轮32的轴的旋转,则角度测量装置1也可以用作旋转编码器。通过径向磁体2在其南北取向上对准的方式,可以看见较小的角度运动。通过绕公转轮所位于的旋转轴线6的位置可以看见更大的绝对角度量的回转。
44.图3和图4示出了对应的传感器10、11、12或10、11、12、13、14、15可以相对于公转轮3或永磁体2围绕旋转轴线6的旋转移动。图2和图3的不同之处在于,随着传感器数量的增加,测量准确度提高。
45.总体上,图3还有图4中的传感器10
‑
15在平行于平面8的平面中移位。通常,图4中的传感器10
‑
15通过相同径向磁体2由于它们很近而在各个位置处通常将感受到较大的磁场。但是,当径向磁体2位于相对位置时,与被观察的传感器10
‑
15的距离也比图3中的变化更大。
46.图5进而示出了具有级联齿轮单元(比如沃尔夫罗姆齿轮单元)的角度测量装置20。轴22穿过壳体21,该轴安装在轴承23中与壳体21相对。齿圈24固定到壳体21上,其中,太阳齿轮25和作为行星齿轮单元的机械联接的行星齿轮26位于该壳体中。行星齿轮26进而与另一个齿圈27机械地联接,即,它们的齿彼此啮合。齿圈27由轴承28与轴22相对支撑。公转轮29进而与这个齿圈联接,所述公转轮牢固地连接至径向磁体2,该径向磁体通过公转轮29的旋转而旋转,一方面绕旋转轴线7(第一旋转轴线)自转,另一方面绕旋转轴线6(第二旋转轴线)旋转,该旋转轴线同时形成轴22的旋转轴线。绕旋转轴线7的自转速度由公转轮29和
驱动轮34的传动比确定。
47.通过将齿轮单元级联,可以测量几次旋转(多转检测),因为一方面可以基本上随意选择旋转运动(绕第二旋转轴线)之一的减速比,而同时,角度的分辨率则相应地较高,因为,尽管该装置紧凑,但是附加地还可以实现另一具有明显更高的传动比(绕第一旋转轴线)的旋转运动。附加地,被设计为单个永磁体、优选地设计为径向磁体的单个励磁元件2基本上是足够的。具有几个永磁体的磁体布置基本上不是必需的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。