1.本文所公开的主题整体涉及超声成像系统和超声成像方法。
背景技术:
2.超声成像是能够采集超声图像数据的成像模态,该超声图像数据可实时查看或者被存储并在采集之后不时查看。超声成像系统还具有能够采集和存储一个或多个视频的能力,每个视频包含在不同时间点采集的多个图像帧。将超声图像数据显示为视频允许临床医生查看人的解剖结构如何随时间推移而改变。与超声成像系统一起使用的超声探头的视场(fov)的尺寸决定了可在超声数据的单个帧中采集的最大面积或最大体积。由于fov的尺寸,在超声检查期间,操作超声成像系统的临床医生可能错过一个或多个感兴趣项目,特别是当试图检查人的身体的大器官或大区域时。
3.为了使超声图像数据中缺失一个或多个感兴趣项目的可能性最小化,特别是当与fov相比成像器官相对较大时,一些常规超声成像系统被配置为生成全景视图。全景视图可由在不同空间位置处采集的多个超声图像生成。由于fov的尺寸所施加的约束,超声图像可以组合或拼接在一起,以便提供覆盖比单个超声图像可能覆盖的面积或体积更大的面积或体积的单个全景视图。
4.用于生成全景视图的超声图像可以是静止帧,每个帧表示单个时间点的人的解剖结构,或者全景视图中的超声图像中的每一个超声图像可以是视频。对于全景视图中的超声图像中的每一个超声图像是视频的实施方案,以临床医生易于解释的方式显示视频存在挑战。由于每个单独的视频是在不同的时间采集的,因此各种患者生命体征(诸如心率或呼吸率)在各个视频之间可能是不同的。已知能基于诸如呼吸率或心率之类的参数来在时间上同步各个视频。然而,当在全景视图中将超声图像显示为视频时,这没有解决基本问题。视频中的每一个视频可被显示为重复循环,使得其连续播放。这意味着每个视频可具有不同的周期。当各自具有不同周期的多个不同视频循环被组合成全景视图并同时播放时,结果对于临床医生而言可能在视觉上混淆。各种视频循环之间的失配可分散临床医生的注意力。由于视频长度之间的失配而导致的视觉变化可能吸引临床医生的注意力,从而使得更难以识别视频中的临床重要特征。因此,需要一种改进的超声成像系统和超声成像方法,其中全景视图中的视频被自动时间缩放,使得所有视频都花费相同的时间量来播放。
技术实现要素:
5.在一个实施方案中,一种超声成像的方法包含在移动超声探头时采集超声图像数据。该方法包含自动识别超声数据中的多个感兴趣片段。该方法包含自动将时间缩放应用于多个感兴趣片段中的至少一个感兴趣片段。该方法包含将超声图像数据显示为包括多个视频的全景视图,其中多个视频中的每一个视频基于多个感兴趣片段中的不同感兴趣片段,并且其中基于时间缩放,全景视图中的多个视频中的每一个视频花费相同的时间量来播放。
6.在一个实施方案中,一种超声成像系统包含显示设备、被配置为采集超声图像数据的超声探头,以及与超声探头和显示设备进行电子通信的处理器。处理器被配置为自动识别超声图像数据中的多个感兴趣片段,并且自动将时间缩放应用于多个感兴趣片段中的至少一个感兴趣片段。处理器被配置为在显示设备上将超声图像数据显示为包括多个视频的全景视图,其中多个视频中的每一个视频基于多个感兴趣片段中的不同感兴趣片段,并且其中基于时间缩放,全景视图中的多个视频中的每一个视频花费相同的时间量来播放。
附图说明
7.通过参考附图阅读以下对非限制性实施方案的描述,将更好地理解本文所述的本发明主题,其中:
8.图1是根据一个实施方案的超声成像系统的示意图;
9.图2示出了根据一个示例的胸腔;
10.图3示出了根据一个实施方案的超声探头;
11.图4示出了根据一个实施方案的方法的实施方案的流程图;
12.图5a示出了肺和肋骨的超声图像数据的一个示例;
13.图5b是示出根据一个实施方案的强度/时间的曲线图;
14.图5c是根据一个实施方案的质心/时间的曲线图;并且
15.图6是根据一个实施方案的全景图像的图示。
具体实施方式
16.本文所述的发明主题的至少一个技术效果包含将多个感兴趣片段显示为包含多个视频的全景视图,其中基于应用于多个感兴趣片段中的至少一个感兴趣片段的时间缩放,全景视图中的多个视频中的每个视频花费相同的时间量来播放。
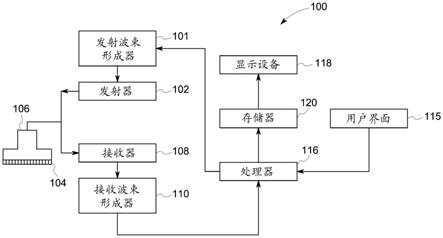
17.图1是根据本文所述的发明主题的一个实施方案的超声成像系统100的示意图。超声成像系统100包含发射波束形成器101和发射器102,该发射波束形成器和发射器驱动超声探头106内的元件104将脉冲超声信号发射到身体(未示出)中。根据一个实施方案,超声探头106可以是线性探头、曲线探头、相控阵列探头、线性相控阵列探头、曲线相控阵列探头、二维矩阵阵列探头、弯曲二维矩阵阵列探头、机械3d探头或能够采集诊断超声图像的任何其他类型的超声探头。
18.脉冲超声信号从体内结构诸如血细胞或肌肉组织反向散射,以产生返回到元件104的回波。回波被元件104转换成电信号,并且电信号被接收器108接收。表示所接收的回波的电信号穿过输出超声图像数据的接收波束形成器110。超声探头106可含有电子电路来执行发射和/或接收波束形成的全部或部分。例如,在其他实施方案中发射波束形成器101、发射器102、接收器108和接收波束形成器110的全部或部分可位于超声探头106内。扫描可包括通过发射和接收超声信号的过程采集数据。由超声探头106采集的超声图像数据可包含用超声成像系统100采集的一个或多个数据集。用户界面115可用于控制超声成像系统100的操作,包含用于控制数据的输入、用于改变扫描或显示参数等。用户界面可包含例如触摸屏、键盘、触摸板、轨迹球、鼠标、一个或多个旋钮、一个或多个硬键以及一个或多个软键中的一者或多者。
19.超声成像系统100还包含处理器116,该处理器控制发射波束形成器101、发射器102、接收器108和接收波束形成器110。处理器116通过一个或多个有线和/或无线连接与探头106进行电子通信。处理器116可控制超声探头106以获取数据。处理器116控制元件104中的哪些元件是活动的以及从超声探头106发射的波束的形状。处理器116还与显示设备118进行电子通信,并且处理器116可将数据处理成图像以显示在显示设备118上。根据一个实施方案处理器116可包含一个或多个中央处理器。根据其他实施方案,处理器116可包含能够执行处理功能的一个或多个其他电子部件,诸如一个或多个数字信号处理器、现场可编程门阵列、图形板和/或集成电路。根据其他实施方案,处理器116可包括能够执行处理功能的多个电子部件。其他实施方案可使用两个或更多个单独的处理器来执行根据图1所示的示例性实施方案由处理器116执行的功能。根据另一个实施方案,处理器116还可包含解调射频数据并生成原始数据的复合解调器(未示出)。在另一个实施方案中,解调可以在处理链中较早地执行。
20.处理器116适于根据数据上的多个可选超声模态来执行一个或多个处理操作。当接收到回波信号时,可以在扫描会话期间实时处理数据,诸如通过在没有任何有意延迟的情况下处理数据,或者在同一人的同一成像会话期间采集附加数据的同时处理数据。
21.数据可在扫描会话期间临时存储在缓冲器(未示出)中,并且在实时或离线操作中以不太实时的方式处理。本发明主题的一些实施方案可包含多个处理器(未示出),以处理根据上文所述的示例性实施方案由处理器116处理的处理任务。例如,第一处理器可用于解调和抽取rf信号,而第二处理器可用于在显示图像之前进一步处理数据。应当理解,其他实施方案可使用不同的处理器布置方式。
22.超声成像系统100可以例如10至30赫兹的帧速率连续采集超声数据。能够以类似帧速率刷新从数据生成的图像。其他实施方案可以以不同速率采集并且显示超声数据。例如,一些实施方案可以小于10赫兹或大于30赫兹的帧速率采集超声数据。
23.包括存储器120,用于存储经处理的采集数据的帧。在一个实施方案中,存储器120具有足够的容量来存储至少数秒钟的超声图像数据。数据帧的存储方式便于根据其采集顺序或时间进行检索。存储器120可包括任何已知的数据存储介质,诸如一个或多个有形的和非暂态的计算机可读存储介质(例如,一个或多个计算机硬盘驱动器、磁盘驱动器、通用串行总线驱动器、固态驱动器等)。
24.在本发明的各种实施方案中,处理器116可通过其他或不同的模式相关模块(例如,b模式、彩色多普勒、m模式、彩色m模式、频谱多普勒、弹性成像、tvi、应变、应变速率等)来处理数据,以形成二维或三维图像数据。例如,一个或多个模块可生成b模式、彩色多普勒、m模式、彩色m模式、频谱多普勒、弹性成像、tvi、应变、应变速率以及它们的组合等。可记录指示在存储器中采集数据的时间的定时信息。这些模块可包括例如扫描转换模块以用于执行扫描转换操作,以将图像体积从光束空间坐标转换为显示空间坐标。视频处理器模块可从存储器读取图像帧,并且在对人进行手术时实时显示图像。视频处理器模块可将图像存储在图像存储器中,从该图像存储器读取和显示图像。
25.图2示出了根据一个示例的人204的胸腔200。采集的超声图像数据(如本文所述)可表示胸腔200的部分,包含人204的肺208、多个肋骨和胸骨210。多个肋骨可包含第一肋骨221、第二肋骨222、第三肋骨223、第四肋骨224、第五肋骨225、第六肋骨226、第七肋骨227、
第八肋骨228、第九肋骨229和第十肋骨230。图2还示出了位于肋骨之间的多个肋间隙。例如,第一肋间隙231、第二肋间隙232、第三肋间隙233、第四肋间隙234和第五肋间隙235全部在图2中表示。第一肋间隙231位于第一肋骨221和第二肋骨222之间;第二肋间隙232位于第二肋骨222和第三肋骨223之间;第三肋间隙233位于第三肋骨223和第四肋骨224之间;并且第四肋间隙234位于第四肋骨224和第五肋骨225之间。人204的胸腔200包含附加肋间隙;然而,这些附加肋间隙尚未在图2上具体标识。在获得超声图像数据时,图1所示的超声探头106可以保持与人204的皮肤的外表面接触,并且沿着人204纵向移动(例如,在比一个或多个其他方向更接近平行于人204的长度或高度的方向上)。该移动还导致超声探头106相对于多个肋骨横向移动。例如,超声探头106可以在平行于或基本上平行于人204的纵分平面202的方向上移动(例如,在平行的十度内、在平行的15度内等)。当超声探头106在超声图像数据的采集期间在该方向上移动时,超声探头106横向于或基本上横向于多个肋骨伸长的方向移动。
26.图3示出了图1所示的超声成像系统100的超声探头106的一个实施方案。超声探头106可具有保持元件104(在图3中的外壳300内不可见)的外壳300。超声探头106的外壳300沿着外壳300的面向表面302与人204交接(例如,接触)。该面向表面302相对于正交(例如,垂直)方向306沿第一方向304伸长。
27.超声探头106可以沿着人204的外侧沿着胸腔200移动,以获采集人204的肺208的超声图像数据。在一个实施方案中,超声探头106横向于多个肋骨伸长的方向移动。例如,超声探头106可以沿着人204的外部在比垂直于纵分平面202更平行于纵分平面202的方向上移动。
28.超声探头106可以保持在超声探头106的外壳300的细长方向304平行于(或比垂直更平行于)人204的多个肋骨取向的取向上,同时超声探头106沿着基本上平行于纵分平面202的方向移动。超声探头106的这种取向可以被称为超声探头106的纵分位置或取向。另选地,超声探头106可保持在垂直于纵分取向的取向上。这种取向导致超声探头106被取向成使得探头106的外壳300的细长方向304垂直于(或比平行更垂直于)人204的多个肋骨,同时探头106在基本上平行于纵分平面202的方向上移动。探头106的这种取向可以被称为探头106的横向位置或取向。
29.图4示出了用于采集超声图像数据并基于超声图像数据显示全景图像的方法400的一个实施方案的流程图。方法400的技术效果是采集身体(例如,肺或另一身体部分)的超声图像数据并显示全景视图,该全景视图显示超声图像数据的多个时间缩放的视频。将相对于采集人的肺的超声图像数据的实施方案来描述方法400,但应当理解,根据其他实施方案,该方法可用于采集不同的解剖区域。
30.在步骤402处,在移动超声探头106时采集超声图像数据。在获得超声图像数据时,超声探头106可以保持与人204的皮肤的外表面接触并且横向于人的肋骨移动。例如,超声探头106可以在平行于或基本上平行于人204的纵分平面202的方向上移动(例如,在平行的十度内、在平行的15度内等)。当超声探头106在超声图像数据的采集期间在该方向上移动时,超声探头106横向于或基本上横向于各个肋骨伸长的方向移动。另选地,超声探头106可在平行于肋骨伸长的方向的方向上移动。根据其他实施方案,超声探头106可以在除平行于肋骨伸长的方向之外的方向上移动,或者基本上横向于肋骨伸长的方向移动。超声图像数
据可以例如包含当超声探头106沿身体移动时采集的多个图像帧。多个图像帧中的每一个图像帧表示在唯一时间点采集的超声图像数据。并且,由于超声探头106在步骤402处采集超声图像数据期间正沿着身体移动,因此图像帧中的每个图像帧也可从患者身体上的略微不同的位置采集。
31.在一个实施方案中,在超声探头106保持在相同取向(例如,仅纵分取向或仅横向取向)并且在单个方向上(例如,仅朝向人204的头部或仅远离人204的头部)移动时采集超声图像数据。在另一个实施方案中,在超声探头106保持在不同取向并在单个方向上移动时采集超声图像数据(例如,在探头106保持在纵分取向时采集超声图像数据的一部分,并且在探头106保持在横向取向时采集超声图像数据的另一部分)。在另一个实施方案中,在超声探头106保持在相同或不同的取向上并且在两个或更多个不同的方向(例如,相反的方向、横向方向、正交方向等)上移动时,采集超声图像数据。
32.图5a示出了用保持在纵分取向的超声探头106采集的人204的肺208和肋骨的超声图像数据500的一个示例。图5a包含多个感兴趣片段和多个肋骨阴影。肋骨阴影指示脉冲超声信号的通过被肋骨阻挡的位置。例如,图5a包含第一感兴趣片段531、第二感兴趣片段532、第三感兴趣片段533和第四感兴趣片段534。图5还包含第二肋骨阴影522、第三肋骨阴影523和第四肋骨阴影524。第二肋骨阴影522由第二肋骨222引起;第三肋骨阴影523由第三肋骨223引起;并且第四肋骨阴影524由第四肋骨224引起。
33.在一个实施方案中,处理器116可被配置为自动识别超声图像数据中的感兴趣片段。感兴趣片段可以是基于图像数据的特性而选择的组合图像数据的子集或部分。处理器116可以检查像素(或图像数据的其他子集)的特性以识别感兴趣片段,诸如图像数据中的像素的颜色、强度、亮度等。
34.图像数据500可以是显示肋间隙504和/或肋骨阴影506的一个或多个部分的移动的视频。这种移动可导致一个或多个感兴趣特征有时出现并且在其他时间从超声图像数据500消失。例如,指示肺炎感染、空气支气管征或其他损伤的图像数据500中的b线或其他特征在一些但不是全部图像帧中可以是可见的。
35.处理器116可以检查由超声探头106采集的图像数据,以确定探头106相对于人204的身体移动的速度。例如,当采集肺208、肋骨等的新区域或不同区域的新的或附加的超声图像数据时,处理器116可以确定超声探头106正在移动。这些新的或不同的区域可包含附加肋间隙和/或肋骨阴影的图像数据。返回到图4所示的方法400的流程图的描述,在采集超声数据之后,诸如在超声探头106的扫描期间,方法400前进至步骤404。根据一些实施方案,临床医生可指示全景图像的所有超声图像数据已通过用户界面115的输入被采集。根据一些实施方案,临床医生可致动按钮,诸如冻结按钮,以便指示超声数据的采集已完成。在步骤404处,处理器116识别超声图像数据中的感兴趣片段。根据示例性实施方案,可能期望识别对应于肋间隙的感兴趣片段,诸如第一肋间隙231、第二肋间隙232、第三肋间隙233、第四肋间隙234和第五肋间隙235。处理器116可以基于图像数据的特性的变化诸如强度的变化(例如,当附加肋间隙被成像时强度增大,或者当肋骨被成像时亮度减小)识别感兴趣片段诸如肋间隙。将参考图5b描述示出处理器116可以如何使用超声图像数据中的强度信息来识别感兴趣片段的示例性实施方案。
36.图5b是示出用于生成图5a所示的图像500的超声图像数据的强度/位置的曲线图
540。曲线图540包含第一部分541、第二部分542、第三部分543、第四部分544、第五部分545、第六部分546和第七部分547。第一部分541表示从第一肋间区域231采集并在图像500上显示为第一感兴趣片段531的超声图像数据的部分;第二部分542表示从第二肋间区域232采集并在图像500上显示为第二感兴趣片段532的超声图像数据的部分;第三部分543表示从第三肋间区域233采集并在图像500上显示为第三感兴趣片段533的超声图像数据的部分;并且第四部分544表示从第四肋间区域234采集并在图像500上显示为第四感兴趣片段534的超声图像数据的部分。第五部分545表示第二肋骨阴影522;第六部分546表示第三肋骨阴影523;并且第七部分547表示第四肋骨阴影524。
37.图5b示出了从肋间隙采集的超声图像数据的部分与从包含肋骨的区域采集的超声图像数据的部分(即,将被表示为图像中的肋骨阴影的部分)之间的差异。从肋间隙采集的超声图像数据的部分具有比从被肋骨模糊的区域采集的超声图像数据高得多的强度。肋骨的存在阻挡了所有或几乎所有的声能,并导致强度为零或接近零。在图像500上,超声图像数据的包含肋骨的部分被描绘为肋骨阴影,诸如第二肋骨阴影522、第三肋骨阴影523和第四肋骨阴影524。
38.根据一个实施方案,处理器116可以基于超声图像数据的强度来识别感兴趣片段。例如,处理器116可以将超声图像数据与阈值进行比较:如果超声图像数据高于阈值,则超声图像数据具有感兴趣片段;如果超声图像数据低于阈值,则超声图像数据表示肋骨阴影并且不包含感兴趣片段。示例性阈值550示于图5b中。根据实施方案,处理器116可使用其他图像属性来由超声图像数据识别感兴趣片段。例如,处理器116可以使用信息诸如多普勒数据、光斑跟踪或色流数据来识别超声图像数据内的感兴趣片段。处理器116还可以使用人工智能,诸如通过使用神经网络来识别超声图像数据中的感兴趣片段。
39.根据另一个实施方案,处理器116可使用质心(com)计算,其中图像中的像素强度被视为质量的当量。处理器116可在超声探头106的平移或扫描的方向上计算com在每个位置处的竖直位置。在存在肋骨和肋骨阴影的位置处,com趋于靠近超声探头106的表面(即,在图像中的较浅深度处),而对于具有肋间隙的图像的部分,com趋于更深。处理器116可基于com计算相对于时间或距离来确定肋骨阴影和肋间隙的位置。例如,根据示例性实施方案,处理器116可通过识别图像中com计算相对较高的区域来识别肋骨和肋骨阴影的位置;并且处理器116可通过识别图像中com计算相对较低的区域来识别图像中肋间隙或胸膜区域的位置。例如,图5c示出com曲线图560的示例。com曲线图560示出com相对于图像中的水平位置的竖直位置。处理器116可识别com曲线图560中的相对峰562和com曲线图560中的相对谷564。相对峰562对应于具有肋骨和肋骨阴影的图像的区域,而相对谷564对应于从肋间隙/胸膜区域获得的图像的区域。
40.在步骤406处,处理器116识别要与全景视图一起使用的目标视频持续时间。根据一个实施方案,处理器116可以确定超声图像数据中的每个感兴趣片段的采集持续时间,并且使用采集持续时间来确定目标视频持续时间。根据一个实施方案,处理器116可以使用来自超声图像数据的强度信息(诸如图5b中表示的强度信息)或根据com计算(诸如图5c中表示的com计算)来识别感兴趣片段中的每个感兴趣片段的开始时间和结束时间。根据一个实施方案,感兴趣片段对应于肋间隙,并且显示从人的肺采集的数据。如相对于步骤402所述,当采集超声图像数据时,超声探头106相对于人移动。例如,超声探头106可在基本上平行于
纵分平面202的方向上平移,以便采集超声图像数据。超声图像数据包含多个超声图像数据帧,每个帧在不同的时间采集。只要在采集超声图像数据期间平移超声探头106,图像帧中的每个图像帧将从相对于人的解剖结构的不同空间位置采集。根据一个实施方案,处理器116可以使用强度信息来识别与每个感兴趣片段相关联的开始时间和结束时间。处理器116可被配置为识别与从肋骨阴影到肋间隙的过渡以及从肋间隙到肋骨阴影的过渡相关联的时间。例如,如图5b所示,与肋骨阴影相关联的强度非常低,并且与肋间隙相关联的强度高得多。当在步骤402期间在采集超声数据期间平移探头时,在超声图像数据的每个帧中采集的解剖结构是不同的。处理器116可被配置为识别超声图像数据中的帧,其中超声图像数据首先从与肋骨阴影相关联的相对低强度转变到与特定肋间隙相关联的相对高强度。同样,处理器116可被配置为识别超声图像数据中的帧,其中超声图像数据从具有相对高强度的特定肋间隙过渡到具有相对低强度的相邻(下一个)肋骨阴影。
41.根据另一个实施方案,处理器116可以使用来自com计算的信息,以便确定超声图像数据中的每个感兴趣片段的采集持续时间。例如,处理器116可使用com计算来识别肋骨和/或肋骨阴影位置,如先前相对于图5c所述。一旦确定了肋骨和/或肋骨阴影的位置,处理器116就可以使用该信息来确定包含特定肋间隙的第一帧的采集时间和包含特定肋间隙的最后帧的采集时间。处理器116可以使用com信息来识别覆盖每个感兴趣片段的超声数据中的帧。
42.由处理器116识别的帧中的每个帧可具有指示采集时间的时间戳。处理器116可以使用所识别的帧和/或相关联的时间戳来识别每个感兴趣片段的开始时间和结束时间,根据示例性实施方案该感兴趣片段为肋间隙。基于超声图像数据中的每个感兴趣片段的所识别的开始时间和结束时间,处理器116可以通过例如计算每个感兴趣片段(例如,每个肋间区域)的开始时间和结束时间之间的时间量来计算每个感兴趣片段的采集持续时间。
43.根据其他实施方案,处理器116可依赖于固定的或预先确定的目标视频持续时间。处理器116可以例如将时间缩放应用于感兴趣片段中的全部或至少一些,使得基于感兴趣片段的视频将各自具有目标视频持续时间。这得到全景视图,其中每个视频花费相同的时间量来播放。换句话讲,在时间缩放之后,全景视图中的每个视频将具有目标视频持续时间。
44.在步骤408处,处理器116将时间缩放应用于感兴趣片段中的一个或多个感兴趣片段。处理器116可以通过扩展一个或多个感兴趣片段和/或收缩一个或多个感兴趣片段来时间缩放超声图像数据。例如,处理器116可以通过在时间上扩展感兴趣片段中的超声图像数据来时间缩放感兴趣片段,使得视频花费更长的时间量来播放。或者,处理器116可以通过收缩感兴趣片段中的超声图像数据来时间缩放感兴趣片段,使得视频花费更短的时间量来播放。在时间上扩展感兴趣片段导致相关联的视频以比采集帧速率更慢的帧速率播放;并且在时间上收缩感兴趣片段导致相关联的视频以比采集帧速率更快的帧速率播放。
45.除了在时间上收缩或扩展超声图像数据之外或代替在时间上收缩或扩展超声图像数据,处理器116可以利用附加技术,以便执行对一个或多个感兴趣片段的时间缩放。例如,处理器116可以在时间上扩展一些感兴趣片段,同时在时间上收缩其他感兴趣片段。如果与特定感兴趣片段相关联的超声图像数据具有比与其他感兴趣片段相关联的超声图像数据显著更少的帧,则处理器116可以播放具有较少帧的视频多于一次,而仅单次播放具有
更多数量帧的视频。例如,如果第一感兴趣片段具有10帧并且第二感兴趣片段具有30帧,则处理器116可以基于第一感兴趣片段播放第一视频三次,而基于第二感兴趣片段仅单次播放第二视频,以便提供对第一感兴趣片段和第二感兴趣片段的适当时间缩放。
46.根据另一个实施方案,处理器116可生成一个或多个内插帧,以便确保全景图像中的每个视频的回放花费相同的时间量。例如,处理器116可以插入内插帧,以便基于特定感兴趣片段来调整视频播放所花费的时间。例如,处理器116可以将内插帧添加到比期望的更短的感兴趣片段,以便提供对超声图像数据的适当时间缩放,使得所有视频都花费相同的时间量来播放。处理器116可被配置为使用上文所述的技术的组合以便提供时间缩放。例如,处理器116可以被配置为使用以下技术中的两种或更多种:在时间上扩展、在时间上收缩、播放感兴趣片段的视频多于一次,或者向与感兴趣片段相关联的视频添加内插帧。根据其他实施方案,时间缩放可包含相对时间缩放。例如,处理器116可以不同于采集超声图像数据的速度回放每个视频。因此,处理器116可基于相对于全景视图中的其他视频调整每个视频的回放速度的程度来提供视频之间的相对时间缩放。换句话讲,通过调整全景视图中每个视频的相对回放速度来执行时间缩放。
47.根据另一个实施方案,将时间缩放应用于感兴趣片段可包含在基于感兴趣片段显示视频时重复感兴趣片段的帧中的一个或多个帧。例如,假设视频以相同的帧速率播放,则通过重复视频中的帧中的一个或多个帧,视频可进行时间缩放以花费更多的时间来播放。
48.可以时间缩放感兴趣片段,以便实现目标视频持续时间。目标视频持续时间可以基于感兴趣片段中的一个或多个感兴趣片段的长度,目标视频持续时间可以由临床医生选择,或者目标视频持续时间可以是预先确定的时间长度。例如,可以时间缩放与一个或多个感兴趣片段相关联的超声图像数据,以匹配与特定感兴趣片段相关联的视频的长度。根据一个实施方案,处理器116可被配置为将时间缩放应用于超声图像数据,使得全景视图中的每个视频花费相同的时间量来播放。根据一个实施方案,处理器116可以时间缩放超声图像数据,使得视频中的每一个视频花费与视频中的最长一个视频相同的时间量来播放。根据一个实施方案,处理器116可以时间缩放与一个或多个感兴趣片段相关联的超声图像数据,使得视频中的每一个视频花费与视频中的最短一个视频相同的时间量来播放。下文将讨论关于时间缩放超声图像数据的附加细节。在步骤410处,处理器116以图6所示的全景视图诸如全景视图600显示超声图像数据。下文将提供关于全景视图600的附加细节。
49.如前所述,全景视图可以通过以下方式采集,即当探头106在人204上移动时获得超声图像数据的不同部分,然后将这些不同的超声图像数据部分拼接或以其他方式组合在一起以形成全景视图。处理器116可以使用图像信息诸如亮度值、形状/图案标识或其他匹配算法来组合与全景视图600中的各个感兴趣片段相关联的超声图像数据的部分。
50.与超声探头106在单个视场(fov)中可获得的图像数据相比,超声图像数据的全景视图600可显示或包含患者的更多图像数据。例如,超声探头106的fov可以比全景视图600小得多。
51.参考图6,全景视图600包含第一部分602、第二部分604、第三部分606、第四部分608、第五部分610、第六部分612、第七部分614和第八部分616。在全景视图600的每个部分中显示基于不同感兴趣片段的视频。例如,可以在第一部分602中显示基于第一感兴趣片段的第一视频;可以在第二部分604中显示基于第二感兴趣片段的第二视频;可以在第三部分
606中显示基于第三感兴趣片段的第三视频;可以在第四部分608中显示基于第四感兴趣片段的第四视频;可以在第五部分610中显示基于第五感兴趣片段的第五视频;可以在第六部分612中显示基于第六感兴趣片段的第六视频;可以在第七部分614中显示基于第七感兴趣片段的第七视频;并且可以在第八部分616中显示基于第八感兴趣片段的第八视频。根据图6所示的实施方案,感兴趣片段中的每个感兴趣片段可为从患者肺区域的不同肋间隙采集的超声图像数据。
52.根据一个实施方案,在全景视图中显示多个视频中的每一个视频可包含将多个视频中的每一个视频显示为重复循环或影片循环。当显示为重复循环时,每个视频被连续重放。换句话讲,当显示为重复循环时,每个视频从视频中的最后一帧过渡到视频中的第一帧。时间缩放超声图像数据是指调整每个视频在循环或重复之前播放所花费的时间长度。每个视频在全景视图中播放所花费的时间长度也可被称为重复循环的周期。可使用时间缩放,使得在全景视图中显示为重复循环的每个视频具有相同的周期。
53.时间缩放超声图像数据使得能够显示全景视图,诸如全景视图600,其中每个视频在重复之前花费相同的时间量来播放。处理器116还可同步全景视图中的所有视频,使得视频中的每一个视频同时从循环的结束过渡到循环的开始(即,循环)。包含已经被时间缩放和同步的视频的全景视图为用户减少了干扰。这允许临床医生专注于全景视图的诊断上重要的方面,而不是被在不同时间点循环的视频所导致的不连续性分散注意力。
54.通过对超声图像数据自动执行时间缩放,处理器116能够在没有任何附加用户输入的情况下向临床医生呈现其中每个视频的长度相同的全景视图。执行时间缩放另外具有呈现更易于临床医生查看和解释的全景视频的优点,因为其在视觉上不太分散临床医生的注意力。
55.如本文所用,以单数形式列举并且以单词“一个”或“一种”开头的元件或步骤应当被理解为不排除多个所述元件或步骤,除非明确说明此类排除。此外,对“一个实施方案”的引用并非旨在被解释为排除也包含所叙述的特征的其他实施方案的存在。此外,除非明确地相反说明,否则“包含”、“包括”或“具有”一个元件或具有特定属性的多个元件的实施方案可包括不具有该属性的其他这类元件。
56.应当理解,以上描述旨在是例示性的而非限制性的。例如,上述实施方案(和/或其方面)可以彼此组合使用。另外,在不脱离本发明的范围的情况下,可进行许多修改以使特定情况或材料适应本发明的教导。虽然本文描述的材料的尺寸和类型旨在限定本发明的参数,但它们决不是限制性的而是示例性实施方案。在回顾以上描述后,许多其他实施方案对于本领域技术人员将是显而易见的。因此,本发明的范围应该参考所附权利要求书以及此类权利要求书所赋予的等同物的全部范围来确定。在所附权利要求书中,术语“包括”和“在
……
中”用作相应术语“包含”和“其中”的通俗中文等同物。此外,在以下权利要求书中,术语“第一”、“第二”和“第三”等仅用作标记,而不旨在对其对象施加数字要求。此外,以下权利要求书的限制不是用装置加功能格式书写的,也不旨在基于35u.s.c.
§
112(f)来解释,除非并且直到这些权利要求书限制明确地使用短语“用于
……
的装置”,然后是没有其他结构的功能陈述。
57.该书面描述使用示例来公开本发明,包括最佳模式,并且还使本领域技术人员能够实践本发明,包括制造和使用任何设备或系统以及执行任何包含的方法。本发明的专利
范围由权利要求书限定,并且可包括本领域技术人员想到的其他示例。如果此类其他示例具有与权利要求书的字面语言没有区别的结构元件,或者如果它们包括与权利要求书的字面语言具有微小差别的等效结构元件,则此类其他示例旨在落入权利要求书的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。