1.本实用新型涉及水质监测技术领域,特别涉及一种地表水水质监测用远程取样装置。
背景技术:
2.地表水是指陆地表面上动态水和静态水的总称,亦称陆地水,包括各种液态的和固态的水体,主要有河流、湖泊、沼泽、冰川、冰盖等,它是人类生活用水的重要来源之一,也是水资源的主要组成部分;水质监测是监视和测定水体中污染物的种类、各类污染物的浓度及变化趋势,评价水质状况的过程;
3.一、传统的地表水水质监测取样方式,通常是需要工作人员携带取样装置到取样点进行取样工作,工作效率较低;
4.二、河流湖泊的岸边通常较为湿滑,工作人员在取样时存在一定的安全风险,为此,提出一种地表水水质监测用远程取样装置。
技术实现要素:
5.有鉴于此,本实用新型实施例希望提供一种地表水水质监测用远程取样装置,以解决或缓解现有技术中存在的技术问题,至少提供一种有益的选择。
6.本实用新型实施例的技术方案是这样实现的:一种地表水水质监测用远程取样装置,包括主体组件、伸缩组件和取水组件,所述主体组件包括无人机本体、支撑柱、泡沫板、支撑环、图像传感器和信号收发器;
7.所述伸缩组件包括第一电动推杆、plc控制器、取水管、第一通孔和第二通孔;
8.所述无人机本体的下表面对称安装有两个图像传感器,所述无人机本体的内部顶壁通过螺栓对称螺纹连接有三个第一电动推杆,三个所述第一电动推杆的活塞杆均焊接有取水管,所述无人机本体的上表面中部安装有信号收发器,所述无人机本体的内部顶壁安装有plc控制器,所述图像传感器的信号输出端通过导线电性连接于plc控制器的信号输入端,所述plc控制器的信号输出端通过导线电性连接于信号收发器的信号输入端,所述plc控制器的电性输出端通过导线电性连接于第一电动推杆的电性输入端;
9.所述伸缩组件的内部安装有取水组件。
10.在一些实施例中,所述取水组件包括第二电动推杆、固定板、支撑板、支撑杆、活塞块、橡胶圈和导水管;
11.所述取水管的内侧壁中部焊接有plc控制器,所述plc控制器的上表面通过螺栓螺纹连接有第二电动推杆,所述第二电动推杆的电性输入端通过导线电性连接于plc控制器的电性输出端,所述取水管的底部连通有导水管;通过plc 控制器控制第二电动推杆的开启和关闭。
12.在一些实施例中,所述第二电动推杆的活塞杆贯穿固定板的内侧壁且焊接有支撑板,所述支撑板的下表面对称焊接有两个支撑杆,两个所述支撑杆的底部均粘接于活塞块
的上表面,所述活塞块的外侧壁中部粘接有橡胶圈;通过运动的活塞块使取水管内的压强降低。
13.在一些实施例中,所述取水管的内侧壁通过转轴铰接有盖板,所述盖板的下表面中部粘接有橡胶块,所述橡胶块的外侧壁与所述导水管的内侧壁滑动连接;通过转动的盖板控制导水管的开启和关闭。
14.在一些实施例中,所述盖板的上表面一侧焊接有扭转弹簧,所述扭转弹簧远离盖板的一端焊接于取水管的内侧壁;通过盖板带动扭转弹簧进行压缩。
15.在一些实施例中,所述取水管的内侧壁安装有制冷片,所述制冷片的电性输入端通过导线电性连接于plc控制器的电性输出端,所述导水管的内侧壁底部焊接有过滤网;通过过滤网对进入导水管内的水进行过滤,避免较大的杂物进入导水管的内部。
16.在一些实施例中,所述无人机本体的下表面对称焊接有四个支撑柱,四个所述支撑柱的底部均焊接于支撑环的外侧壁,所述支撑环的内侧壁粘接有泡沫板,所述支撑环的外侧壁底部粘接有橡胶气囊;通过橡胶气囊和泡沫板使无人机本体漂浮在水面上。
17.在一些实施例中,所述无人机本体的下表面对称开设有三个第一通孔,所述泡沫板的下表面对称开设有三个第二通孔,三个所述第一通孔和第二通孔的内侧壁均与所述取水管的外侧壁滑动连接,两个所述图像传感器的下表面均套设有亚克力罩体,所述亚克力罩体的顶部粘接于无人机本体的下表面;通过第一通孔和第二通孔为取水管进行导向工作。
18.本实用新型实施例由于采用以上技术方案,其具有以下优点:
19.一、本实用新型通过图像传感器采集无人机本体周边的图像,然后通过plc 控制器和将图像传输至远程控制终端,以便于工作人员更快速的找到取样点,然后通过plc控制器启动第一电动推杆工作,plc控制器的活塞杆带动取水管插入水中进行取样工作,从而无需工作人员靠近岸边便可完成取样工作,提高了工作人员的安全保障。
20.二、本实用新型通过plc控制器启动第二电动推杆工作,第二电动推杆的活塞杆通过支撑板带动支撑杆运动,运动的支撑杆,从而通过导水管将水导入取水管的内部进行储存,从而节约了工作人员的劳动量,提高了工作效率。
21.上述概述仅仅是为了说明书的目的,并不意图以任何方式进行限制。除上述描述的示意性的方面、实施方式和特征之外,通过参考附图和以下的详细描述,本实用新型进一步的方面、实施方式和特征将会是容易明白的。
附图说明
22.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
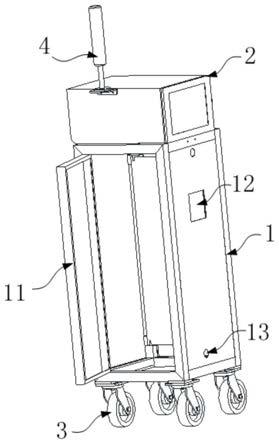
23.图1为本实用新型的结构图;
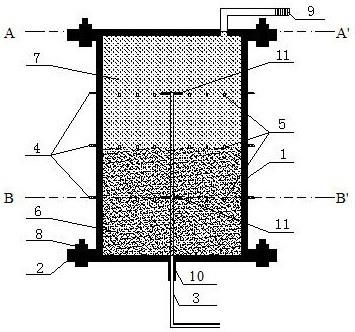
24.图2为本实用新型取水管的内部结构示意图;
25.图3为本实用新型图2的a区结构放大示意图;
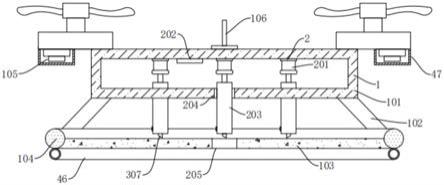
26.图4为本实用新型导水管的内部结构示意图;
27.图5为本实用新型图像传感器和plc控制器的电路图。
28.附图标记:1、主体组件;2、伸缩组件;3、取水组件;101、无人机本体;102、支撑柱;103、泡沫板;104、支撑环;105、图像传感器;106、信号收发器; 201、第一电动推杆;202、plc控制器;203、取水管;204、第一通孔;205、第二通孔;301、第二电动推杆;302、固定板;303、支撑板;304、支撑杆; 305、活塞块;306、橡胶圈;307、导水管;41、盖板;42、扭转弹簧;43、橡胶块;44、过滤网;45、制冷片;46、橡胶气囊;47、亚克力罩体。
具体实施方式
29.在下文中,仅简单地描述了某些示例性实施例。正如本领域技术人员可认识到的那样,在不脱离本实用新型的精神或范围的情况下,可通过各种不同方式修改所描述的实施例。因此,附图和描述被认为本质上是示例性的而非限制性的。
30.下面结合附图对本实用新型的实施例进行详细说明。
31.如图1
‑
5所示,本实用新型实施例提供了一种地表水水质监测用远程取样装置,包括主体组件1、伸缩组件2和取水组件3,主体组件1包括无人机本体 101、支撑柱102、泡沫板103、支撑环104、图像传感器105和信号收发器106;
32.伸缩组件2包括第一电动推杆201、plc控制器202、取水管203、第一通孔204和第二通孔205;
33.无人机本体101的下表面对称安装有两个图像传感器105,无人机本体101 的内部顶壁通过螺栓对称螺纹连接有三个第一电动推杆201,三个第一电动推杆201的活塞杆均焊接有取水管203,无人机本体101的上表面中部安装有信号收发器106,无人机本体101的内部顶壁安装有plc控制器202,图像传感器105的信号输出端通过导线电性连接于plc控制器202的信号输入端,plc 控制器202的信号输出端通过导线电性连接于信号收发器106的信号输入端, plc控制器202的电性输出端通过导线电性连接于第一电动推杆201的电性输入端;
34.伸缩组件2的内部安装有取水组件3。
35.在一个实施例中,取水组件3包括第二电动推杆301、固定板302、支撑板 303、支撑杆304、活塞块305、橡胶圈306和导水管307;
36.取水管203的内侧壁中部焊接有plc控制器202,plc控制器202的上表面通过螺栓螺纹连接有第二电动推杆301,第二电动推杆301的电性输入端通过导线电性连接于plc控制器202的电性输出端,取水管203的底部连通有导水管307;通过以上设置,远程控制终端通过信号收发器106和plc控制器202 启动第二电动推杆301工作,通过设置的导水管307将水导入取水管203的内部。
37.在一个实施例中,第二电动推杆301的活塞杆贯穿固定板302的内侧壁且焊接有支撑板303,支撑板303的下表面对称焊接有两个支撑杆304,两个支撑杆304的底部均粘接于活塞块305的上表面,活塞块305的外侧壁中部粘接有橡胶圈306;通过以上设置,第二电动推杆301的活塞杆带动支撑板303运动,运动的支撑板303带动支撑杆304运动,运动的支撑杆304带动活塞块305 运动,运动的活塞块305带动橡胶圈306运动,通过设置的橡胶圈306增加了活塞块305和取水管203之间的密封性,运动的活塞块305使取水管203内的压强降低。
38.在一个实施例中,取水管203的内侧壁通过转轴铰接有盖板41,盖板41 的下表面中部粘接有橡胶块43,橡胶块43的外侧壁与导水管307的内侧壁滑动连接;通过以上设置,盖板41带动橡胶块43运动,通过运动的橡胶块43 控制导水管307的开启和关闭。
39.在一个实施例中,盖板41的上表面一侧焊接有扭转弹簧42,扭转弹簧42 远离盖板41的一端焊接于取水管203的内侧壁;通过以上设置,运动的盖板 41带动扭转弹簧42运动,运动的扭转弹簧42通过挤压取水管203的内侧壁进行压缩。
40.在一个实施例中,取水管203的内侧壁安装有制冷片45,制冷片45的电性输入端通过导线电性连接于plc控制器202的电性输出端,导水管307的内侧壁底部焊接有过滤网44;通过以上设置,plc控制器202控制制冷片45的开启和关闭,开启的制冷片45对取水管203内的样品进行降温工作,避免了样品在温度的影响下发生变质。
41.在一个实施例中,无人机本体101的下表面对称焊接有四个支撑柱102,四个支撑柱102的底部均焊接于支撑环104的外侧壁,支撑环104的内侧壁粘接有泡沫板103,支撑环104的外侧壁底部粘接有橡胶气囊46;通过以上设置,橡胶气囊46和泡沫板103带动无人机本体101漂浮在取样点水面上。
42.在一个实施例中,无人机本体101的下表面对称开设有三个第一通孔204,泡沫板103的下表面对称开设有三个第二通孔205,三个第一通孔204和第二通孔205的内侧壁均与取水管203的外侧壁滑动连接,两个图像传感器105的下表面均套设有亚克力罩体47,亚克力罩体47的顶部粘接于无人机本体101 的下表面;通过以上设置,第二通孔205和第一通孔204为取水管203进行导向工作,避免了取水管203在运动中发生偏移。
43.在一个实施例中,无人机本体101的上表面安装有用于开启和关闭图像传感器105、信号收发器106和plc控制器202的开关组,开关组的电性输入端通过导线电性连接于蓄电池的电性输出端,用以为图像传感器105、信号收发器106和plc控制器202供电。
44.在一个实施例中,图像传感器105的型号为tl
‑
ipc633
‑
4;信号收发器106 的型号为dmx512;第一电动推杆201的型号为xdha12
‑
150;第二电动推杆 301的型号为xdha12
‑
200;plc控制器202的型号为df
‑
96d;制冷片45的型号为tes1
‑
12706。
45.本实用新型在工作时:通过开关组启动图像传感器105、信号收发器106 和plc控制器202工作,工作的图像传感器105对无人机本体101周边的环境进行图像采集,采集的图像通过导线传输至plc控制器202,然后通过plc 控制器202连接的信号收发器106将图像传感器105采集的图像发送至远程控制终端,以便于工作人员更好的控制无人机本体101的飞行,当无人机本体101 飞行至取样点时,通过设置的橡胶气囊46和泡沫板103带动无人机本体101 漂浮在取样点水面上,然后远程控制终端通过信号收发器106和plc控制器 202启动第一电动推杆201工作,第一电动推杆201的活塞杆带动取水管203 运动,运动的取水管203通过在第一通孔204和第二通孔205内滑动,增加了取水管203的稳定性,避免了取水管203在运动中发生偏移,运动的取水管203 插入水中,然后通过plc控制器202启动第二电动推杆301工作,第二电动推杆301的活塞杆带动支撑板303运动,运动的支撑板303带动支撑杆304运动,运动的支撑杆304带动活塞块305运动,运动的活塞块305带动橡胶圈306运动,通过设置的橡胶圈306增加了活塞块305和取水管203之间的密封性,运动的活塞块305使取水管203内的压强降低,然后通过导水管307将取样点的水导流至取水管203内进行储存,通过设置的过滤网44,对水中较大的杂物进行过滤,避免了杂物通过导水管307进入取水管203
的内部,同时,导水管307 内的水带动盖板41运动,运动的盖板41带动扭转弹簧42和橡胶块43运动,运动的橡胶块43通过挤压取水管203的内壁进行压缩,运动的橡胶块43从导水管307的内部脱离,从而使导水管307内的水顺利进入取水管203的内部,取样完成后,被压缩的扭转弹簧42带动盖板41运动,运动的盖板41带动橡胶块43插入导水管307的内部,对导水管307进行密封工作,避免了取水管203 内的样品发生泄漏,本装置不仅无需工作人员靠近岸边便可完成取样工作,增加了工作人员的安全保障,而且节约了工作人员的劳动量,提高了工作效率。
46.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到其各种变化或替换,这些都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。