1.本公开涉及隧道施工领域,特别涉及一种智能化判定隧道喷射混凝土速度与厚度的喷射机。
背景技术:
2.本部分的陈述仅仅是提供了与本公开相关的背景技术,并不必然构成现有技术。
3.我国隧道工程支护结构一般由初期支护与二次衬砌构成,由于二次衬砌施工具有滞后性,因此隧道初期支护在保证隧道施工过程中的安全以及隧道防水体系的有效性具有举足轻重的作用。
4.隧道初期支护一般由喷射混凝土、锚杆、钢筋网以及钢拱架组成,其中喷射混凝土具有将其他各部分连接到一起的作用,喷射混凝土的厚度、速度、表面均匀度(平整度)等决定着初期支护的质量。传统喷射混凝工艺一般有“人 喷射枪”或“人 喷射机”两种,喷射质量受人为因素较大,同时由于隧道爆破易造成开挖轮廓不规则,出现隧道超挖或欠挖情况。人工喷射混凝土时存在对隧道超欠挖判断不准确,喷射位置掌握不好,喷射速度无法控制,喷射厚度无法判断,喷射混凝土表面平整度控制不到位等缺陷,往往造成欠挖位置无法处理,喷射厚度不够,超挖位置无法喷至设计位置,直接影响到初期支护的强度,给隧道施工期间带来了巨大安全隐患;人工喷射速度无法控制,喷射速度过快或过慢,都会影响到喷射混凝土质量,造成初期支护耐久性不足;喷射厚度无法判断,直接影响初期结构的整体强度;人工喷射混凝土表面易出现不均匀以及拱架位置出现“肋骨”的情况,平整度往往不满足规范要求,喷射混凝土凸起部分易刺破隧道防水层,使隧道防水体系失效,同时喷射混凝土凹陷部分与隧道二次衬砌之间脱空,易造成隧道二次衬砌受力不均出现开裂现象,与钢拱架交叉的“肋骨”区域已造成钢拱架腐蚀生锈,降低钢拱架的承载能力。
技术实现要素:
5.本公开的目的是针对现有技术存在的缺陷,提供一种智能化判定隧道喷射混凝土速度与厚度的喷射机。
6.本实用新型采用的技术方案如下:
7.一种智能化判定隧道喷射混凝土速度与厚度的喷射机,包括可移动的车体,在所述的车体上设有喷射机储料箱、喷射机操控室和喷射机机械臂,所述的喷射机操控室的前端连接所述的喷射机机械臂,所述的喷射机机械臂与喷射机储料箱相连通,所述的喷射机机械臂上安装有速度控制器和第一定位传感器;在喷射机操控室安装有第二定位传感器,所述的第一定位传感器、速度控制器和第二定位传感器均与喷射机操控室内的控制系统相连。
8.通过将隧道内水准点位置以及隧道设计参数输入喷射机内部,喷射机根据自身停放位置与水准点进行校核,通过内部方法计算将隧道内轮廓以水准点为原点的坐标系转换为已传感器为原点的坐标系,同时获取传感器与隧道初期支护之间的相对位置关系。通过
传感器对隧道开挖轮廓进行扫描获取隧道存在超欠挖的区域,对于欠挖严重的区域提示作业人进行再次开挖,超挖严重的区域喷射混凝土速度会自动提高喷射速度。同时每完成一层混凝土喷射后喷射机会自动进行一次喷射混凝土表面扫描,对于凹陷区域,下次在该位置喷射混凝土时会自动提高喷射速度,对于凸起区域,下次在该位置喷射混凝土时会自动降低喷射速度,以此保证喷射混凝土表面的平整度,直到喷射混凝土厚度与表面平整度达到设计要求。
9.本实用新型的有益效果:
10.1.本实用新型公开的喷射机中,通过机械臂上的第一定位传感器,扫描开挖后隧道内轮廓的实时数据与输入的隧道设计开挖轮廓参数进行对比,自动判定隧道开挖的超挖与欠挖区域,并进行标定记录;在喷射机操控室安装有第二定位传感器,通过第二定位传感器确定喷射机相对于原始坐标的相对位置,实现自动定位;
11.2.本实用新型公开的喷射机,设置有隧道喷射速度控制器,可以自动控制混凝土的喷射速度;
12.3.本实用新型公开的喷射机,可以实现在隧道超挖区域范围内喷射机提高喷射速度;
13.4.本实用新型公开的喷射机,可以实现在隧道欠挖区域范围内喷射机降低喷射速度,实现与超挖区域内表面齐平;
14.5.本实用新型公开的喷射机,可以实现初期支护分层喷射混凝土,提高混凝土的均匀性,保证初期支护的施工质量;
15.5.本实用新型公开的喷射机,可以自动实现每层混凝土喷射完成后对隧道内轮廓进行一次扫描,不断校正喷射混凝土内表面,保证喷射混凝土内表面平整度;
16.6.本实用新型公开的喷射机,间接的保护了隧道防水系统,避免了防水板被凸起区域的喷射混凝土刺破,提高了防水系统的防水功能;
17.7.本实用新型公开的喷射机,间接的提高了隧道二次衬砌的受力性能,避免了隧道二次衬砌与喷射混凝土凹陷区域的脱空情况,使二次衬砌结构受力更加合理。
附图说明
18.构成本技术的一部分的说明书附图用来提供对本技术的进一步理解,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的限定。
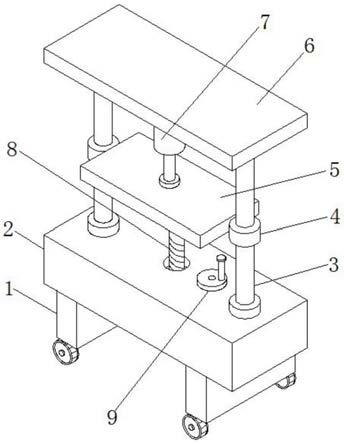
19.图1本实用新型实例整体示意图;
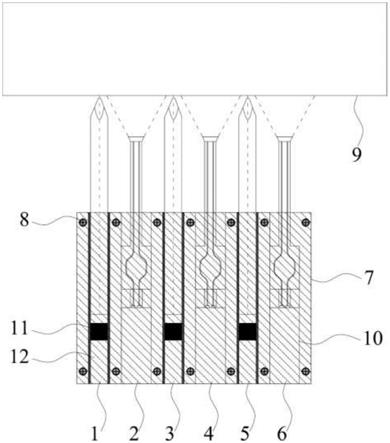
20.图2本实用新型实例超欠挖及喷射混凝土凸出、凹陷示意图;
21.图3本实用新型实例超欠挖及喷射混凝土凸出、凹陷示意图放大图;
22.图4本实用新型实例以水准点为原点的极坐标系;
23.图5本实用新型实例以位置传感器为原点的极坐标系;
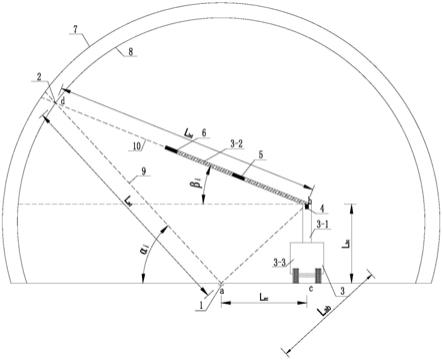
24.图6两坐标系转化原理图;
25.其中:1.隧道内施工测量水准点,2.传感器扫描点,3.喷射机,3
‑
1.喷射机操控室,3
‑
2.喷射机机械臂,3
‑
3.喷射机储料箱,4.第二定位传感器,5.第一定位传感器,6.喷射机喷射速度控制器,7.隧道开挖设计内轮廓线,8.隧道喷射混凝土设计内轮廓线,9.水准点1与扫描点2的连接导线,10.隧道超挖区域, 11.隧道欠挖区域,12.喷射混凝土凸起区域,
13.喷射混凝土凹陷区域。
具体实施方式
26.应该指出,以下详细说明都是例示性的,旨在对本实用新型提供进一步的说明。除非另有指明,本实用新型使用的所有技术和科学术语具有与本实用新型所属技术领域的普通技术人员通常理解的相同含义。
27.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本实用新型的示例性实施方式。如在这里所使用的,除非本实用新型另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合;
28.正如背景技术所介绍的,现有技术中存在不足,为了解决如上的技术问题,本实用新型提出了一种智能化判定隧道喷射混凝土速度与厚度的喷射机。
29.本实用新型的一种典型的实施方式中,如图1所示,其公开了一种智能化判定隧道喷射混凝土速度与厚度的喷射机,包括可移动的车体,在所述的车体上设有喷射机储料:3
‑
3、喷射机操控室3
‑
1和喷射机机械臂3
‑
2,所述的喷射机操控室3
‑
1的前端连接有喷射机机械臂3
‑
2,所述的喷射机机械臂3
‑
2与喷射机储料箱3
‑
1相连通,所述的喷射机机械臂3
‑
2上安装有喷射机喷射速度控制器6和第一定位传感器5;在喷射机操控室安装有第二定位传感器4,所述的第一定位传感器5、喷射机喷射速度控制器6和第二定位传感器4与喷射机操控室内的控制系统相连。
30.如图1所示,上述的喷射机喷射速度控制器6位于喷射机机械臂的浆液出口位置,通过操控室可以控制喷射机喷射速度控制器,进而调整机械臂的喷射速度。
31.进一步的,上述的喷射机操控室上安装的第二定位传感器4包括第二角度传感器和第二距离传感器;对应图1,所述的第二角度传感器用于检测传感器所在的竖直线与传感器、施工水准测量点两者连线间夹角;所述的第二距离传感器用于检测传感器与施工水准测量点间的水平与竖直;
32.进一步的,在机械臂上安装的第一定位传感器5包括第一角度传感器和第一距离传感器;对应图1,所述的第一角度传感器用于检测机械臂与水平面之间夹角;所述的第一距离传感器用于检测传感器与隧道设计轮廓面之间的距离。
33.本实用新型通过将隧道内水准点位置以及隧道设计参数输入喷射机内部,喷射机根据自身停放位置与水准点进行校核,通过现有的方法计算将隧道内轮廓以水准点为原点的坐标系转换为已传感器为原点的坐标系,同时获取传感器与隧道初期支护之间的相对位置关系。通过传感器对隧道开挖轮廓进行扫描获取隧道存在超欠挖的区域,对于欠挖严重的区域提示作业人进行再次开挖,超挖严重的区域喷射混凝土速度会自动提高喷射速度。同时每完成一层混凝土喷射后喷射机会自动进行一次喷射混凝土表面扫描,对于凹陷区域,下次在该位置喷射混凝土时会自动提高喷射速度,对于凸起区域,下次在该位置喷射混凝土时会自动降低喷射速度,以此保证喷射混凝土表面的平整度,直到喷射混凝土厚度与表面平整度达到设计要求。
34.本实用新型的工作原理:通过建立理论三维模型,可以分析出洞内的理论参数(理论的角度与距离的对应关系),然后实际的情况必然与理论分析有偏差,两者进行对比,在
允许范围内不用补喷,允许范围之外,继续补喷。具体如下:
35.1、引入数学中映射概念,建立以水准点为原点的极坐标系,角度变量α与半径变量l
ad
一一对应(一个角度变量α有且仅有一个半径变量l
ad
与之对应,反之一个半径变量l
ad
可以有多个角度变量α与之对应)。定义关系式l
ad
=f(α),表示l
ad
是以α为自变量的函数。其中l
ad
与α在隧道设计内轮廓确定以及施工测量水准点放样完成后,其对应关系成为已知参数可以输入到喷射机内部系统中;
36.2、喷射机进入隧道内部停放位置并不确定,因此建立以第二定位传感器为原点的极坐标系。其中l
ac
为第二定位传感器与水准点1的水平距离,l
bc
为第二定位传感器与水准点1的竖向距离。
37.3、根据图6所示,给出正弦定理、余弦定理表达式(及其变形表达式):
38.正弦定理:
[0039][0040]
余弦定理:
[0041][0042][0043][0044]
4、根据以上1、2、3以及图6来说明两坐标系之间的转换关系。
[0045]
(1)当喷射机就位后,通过第一定位传感器可以确定距离l
ac
以及l
bc
,因为δabc为直角三角形,所以γ=90
°
,根据勾股定理可以δabc斜边长度,即因此lab、lac、lbc均为已知参数;
[0046]
(2)同时可以根据余弦定理计算出δabc三个角度值大小:
[0047][0048]
γ=90
°
[0049]
η=90
°‑
δ
[0050]
(3)根据余弦定理等可得δabd中的相关边长及角度为:
[0051]
λ=180
‑
δ
‑
α
[0052][0053][0054]
[0055]
β=θ
‑
η 90
°
[0056]
(4)根据以上(1)(2)(3)可知,到喷射机就位后,三角形δabc中的三条边长度l
ab
、l
ac
、l
bc
与角度值δ、η、γ均为已知参数;三角形δabd中除边长l
ab
为已知参数外,其余边长l
ad
、l
cd
与角度λ、θ(β)均为角度α的因变量,即l
ad
、l
bd
与角度λ、θ(β)均可以表示为角度α的函数。反之边长l
ad
、l
cd
与角度λ、α均为角度β的因变量,即l
ad
、l
bd
与角度λ、α均可以表示为角度β的函数。
[0057]
l
ad
=f1(α)
[0058][0059]
l
bd
=f4(β)
[0060]
表1关系对应表
[0061][0062]
(5)第一定位传感器可以根据机械臂的移动,感知角度β以及距离l
bd
。
[0063]
(6)喷射机中的第一定位传感器实际测量的喷射混凝土的厚度及平整度数据,与理论分析数据进行对比,通过设置合理的偏差值来判定喷射混凝土厚度与平整度是否满足预期。当实际偏差小于设置的偏差值,则喷射混凝土厚度与平整度满足预期,执行区域作业;当当实际偏差大于设置的偏差值,则喷射混凝土厚度与平整度不及预期,继续该区域喷射混凝土作业,直至满足偏差要求。
[0064]
最后还需要说明的是,上述工作原理中涉及到的计算属于简单的数学计算,对应该计算的控制程序也属于常见的控制程序,因此,本实用新型本身部包括对算法以及程序本身的改进。
[0065]
以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。