1.本发明涉及手术导航与植入系统设备技术领域,具体是一种手术导航与放射性植入系统用导航支架及其使用方法。
背景技术:
2.癌症治疗最有效的方法就是手术切除或化疗,但是医生凭借肉眼和触摸的经验很难对于尺寸较小的癌症组织或肿瘤边界进行有效的判断。因此,为医生提供病灶区的精确直观影像成为研究的热点;
3.手术导航与放射性植入系统,以下简称导航植入系统,其主要是对手术或放射性植入进行导航,主要用于肿瘤的手术治疗和放射性治疗;在手术过程中准确识别肿瘤的位置,引导医生进行手术切除,引导放射性粒籽源精准植入肿瘤靶区,通过放疗的方式予以治疗;
4.目前导航植入系统中光学定位系统比较成熟的是光学定位仪(红外精准定位系统),光学定位系统的工作原理是把检测到的被测物体三维坐标信息传给上位机,由上位机的后续处理获得手术导航定位反光小球的坐标,手术导航系统利用反光小球获得的病灶位置的坐标,目前导航植入系统中通常采用固定支架的形式对光学定位仪进行固定,如专利申请号为201520698883.8,一种基于图像的外科手术导航系统,其中的红外光学定位仪固定在支架上,近些年来在实践过程中,有的在固定支架前端采用万向球头连接,并手动调节光学定位仪位置,随着自动化和智能化的发展,传统的调节局限性越来越大,不方便调节光学定位仪的转角和倾角,不能实现便捷式全方位的位置和角度调节,不利于手术导航与放射性植入系统的快速精准导航定位。
技术实现要素:
5.本发明所要解决的技术问题是:目前用于固定光学定位仪的导航支架,结构简单,不方便调节光学定位仪的转角和倾角,不能实现便捷式全方位位置和角度调节,不利于手术导航与放射性植入系统的快速精准导航定位。
6.因此,本发明提供如下技术方案:
7.一种手术导航与放射性植入系统用导航支架,该导航支架用于固定光学定位仪,所述导航支架包括壳体、竖直伸缩架、壳体移动与锁定机构、水平伸缩架、旋转机构以及万向连接头机构;所述竖直伸缩架安装在壳体内,顶部能够升起伸出壳体或下降收纳于壳体内;壳体移动与锁定机构设置于壳体底部,使得壳体能够移动和锁定于地面或支撑面,所述水平伸缩架尾端通过旋转机构连接在竖直伸缩架顶部,能够伸缩和转动调节;所述万向连接头机构固定连接在水平伸缩架前端;水平伸缩架能够驱动万向连接头机构伸缩,光学定位仪连接在万向连接头机构上,万向连接头机构能够驱动调节光学定位仪的全方位角度。
8.工作时,导航支架固定光学定位仪,壳体移动至相应位置并锁定,竖直伸缩架从壳体内升起,带动待光学定位仪上升至合适高度后锁定,水平伸缩架旋转并伸缩,带动光学定
位仪进入工作区域内并锁定;万向连接头机构调节光学定位仪的水平转角以及倾角,光学定位仪处于合适定位导航工位;实现光学定位仪全方位便捷式位置调节,有利于手术导航与放射性植入系统的快速精准导航定位。
9.另外一方面竖直伸缩架隐藏于壳体内的设计,在定位结束后能够收纳于壳体内,使得壳体顶部空间结构简洁,便于设备管理;
10.作为本发明的进一步方案:所述竖直伸缩架包括刚性链、链轮、轮座、升降动力机构、导向伸缩套筒以及储链筒;所述链轮通过轮座安装在壳体内底部;所述导向伸缩套筒安装在壳体内,并对应链轮一侧设置,顶端能够伸出壳体;所述储链筒安装在壳体内,并对应链轮另一侧设置;
11.刚性链一端内置于导向伸缩套筒内,并与导向伸缩套筒顶端固定连接,另一端绕过链轮,与链轮啮合传动并伸入储链筒内;升降动力机构驱动链轮转动,带动刚性链在导向伸缩套筒以及储链筒内升降,带动导向伸缩套筒升降。本发明进一步采用刚性链和链轮的升降结构,使得升降结构简洁,便于隐藏式容置于壳体内。
12.作为本发明的再进一步方案:所述水平伸缩架包括水平滑筒、水平滑杆以及滑杆伸缩机构;所述水平滑筒一端通过旋转机构转动连接在导向伸缩套筒顶部,另一端滑动配合水平滑杆;滑杆伸缩机构设置于水平滑筒内,与水平滑杆连接,驱动水平滑杆沿水平滑筒伸缩;所述滑杆伸缩机构包括伸缩丝杆以及与伸缩丝杆传动连接的伸缩电机,伸缩丝杆以及伸缩电机固定在水平滑筒内,水平滑杆与伸缩丝杆的自由端啮合传动。本发明进一步采用丝杆滑块式移动机构,并简化结构设计水平伸缩架,方便水平位移调节;
13.作为本发明的再进一步方案:所述旋转机构包括机仓、旋转轴、旋转电机以及传动齿轮,旋转轴套装在机仓外侧设置的轴承上,机仓内旋转电机通过传动齿轮与旋转轴传动连接,旋转机构结构简洁可靠,方便旋转或转角调节。
14.作为本发明的再进一步方案:所述万向连接头机构包括旋转机构以及倾角调节机构;所述旋转机构的机仓固定在水平滑杆前端底部,所述倾角调节机构包括倾角调节仓、连接杆、万向球、球座、连接板以及拉丝倾角调节机构;
15.倾角调节仓与旋转机构的旋转轴固定连接;
16.所述连接杆顶部与倾角调节仓固定连接并连通;
17.连接杆底端固定连接有万向球;
18.所述连接板顶部中间位置固定有球座;
19.所述万向球套装在球座上,与球座转动连接;
20.所述拉丝倾角调节机构内置于倾角调节仓中,并与连接板连接,驱动连接板绕万向球调节倾角;所述光学定位仪可拆卸固定在连接板底部。
21.本发明进一步设计万向连接头机构,通过旋转机构实现旋转或转角调节,另外配合设计倾角调节机构,利用球接限制位移,通过设计拉丝倾角调节机构调节倾角,安全可靠。
22.作为本发明的再进一步方案:所述拉丝倾角调节机构包括拉丝、丝轮以及丝轮动力机构;所述拉丝设有3个,中心对称连接在连接板顶部;所述丝轮设有3个,对应中心对称设置在倾角调节仓中;拉丝伸入倾角调节仓,分别一一对应绕装在丝轮上;丝轮动力机构与丝轮一一对应设置驱动丝轮转动收放拉丝;所述拉丝动力机构包括轮架、轮轴以及拉丝电
机,所述丝轮套装在轮轴上,并安装在轮架上,轮架和拉丝电机固定在倾角调节仓内,拉丝电机与轮轴传动连接。
23.本发明进一步巧妙设计拉丝倾角调节机构,利用3个抱紧状态的拉丝和以及中间的球座,锁定连接板,而利用3个拉丝的长度变化来调节连接板的倾角,进而调节安装在连接板的光学定位仪。
24.作为本发明的再进一步方案:所述连接杆为中空杆件,连接杆顶部与倾角调节仓连通,连接杆底部对称设有三个导线孔,拉丝顶端穿入连接杆的导线孔,并穿过连接杆进入倾角调节仓内,绕装在倾角调节仓内相应位置的丝轮上。本发明进一步巧妙地将拉丝内置于连接杆内,使得结构简洁可靠,能够有效避免受碰撞或扰动。
25.作为本发明的再进一步方案:所述壳体移动与锁定机构包括带锁脚轮、锁紧滑块、锁紧架以及锁紧吸盘;
26.所述带锁脚轮设有4个,分别安装在壳体底部四角位置;
27.所述储链筒外侧设有锁紧滑槽,锁紧滑块滑动配合在锁紧滑槽上,
28.所述锁紧架包括横架以及弹性伸缩杆;横架与锁紧滑块固定连接,所述锁紧吸盘与弹性伸缩杆一一对应设置,弹性伸缩杆设有3个,弹性伸缩杆呈中心对称布置在横架下方,弹性伸缩杆顶端连接横架,底端连接锁紧吸盘。
29.所述壳体底部对应弹性伸缩杆以及锁紧吸盘设有锁紧槽口;弹性伸缩杆以及锁紧吸盘能够通过锁紧槽口伸至壳体底部。
30.本发明进一步巧妙设计移动与锁定机构利用竖直伸缩架为锁定提供执行动力,并配合设计弹性伸缩杆,使得竖直伸缩架在锁定后依然具有一定的升降活动量,且不影响吸盘锁定;
31.本发明进一步提供上述手术导航与放射性植入系统用导航支架的使用方法,包括如下步骤:
32.步骤一:壳体移动至相应位置并锁定,竖直伸缩架从壳体内升起带动待光学定位仪上升至合适高度后锁定;
33.步骤二:水平伸缩架旋转并伸缩,带动光学定位仪进入工作区域内,并锁定;
34.步骤三:万向连接头机构驱动调节光学定位仪的水平转角以及倾角,使光学定位仪处于合适定位导航工位。
35.与现有技术相比,本发明具有以下几个方面的有益效果:
36.1、本发明提供了一种手术导航与放射性植入系统用导航支架,用于固定光学定位仪,能够升降、转动、水平伸缩、转角以及倾角调节,实现了实光学定位仪全方位便捷式位置调节,有利于手术导航与放射性植入系统的快速精准导航定位。
37.2、本发明进一步设计竖直伸缩架隐藏于壳体内的设计,并巧妙利用刚性链和链轮配合式的升降结构,使得升降结构简洁,便于隐藏式容置于壳体内,在定位结束后能够收纳于壳体内,使得壳体顶部空间结构简洁,便于设备管理;
38.3、本发明进一步设计万向连接头机构,尤其是倾角调节机构巧妙设计成拉丝倾角调节机构,实现全方位倾角调节,利用3个抱紧状态的拉丝和以及中间的球座,锁定连接板,而利用3个拉丝的长度变化来调节连接板的倾角,进而调节安装在连接板的光学定位仪的倾角。
39.4、本发明进一步巧妙设计移动与锁定机构利用竖直伸缩架为锁定提供执行动力,结构简洁,并配合设计弹性伸缩杆,使得竖直伸缩架在锁定后依然具有一定的升降活动量,且不影响吸盘锁定。
附图说明
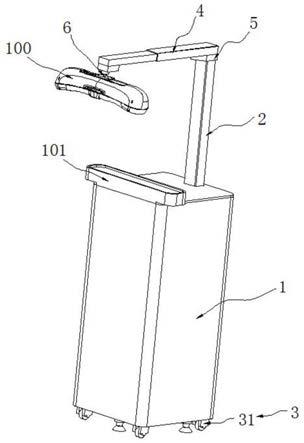
40.图1为一种手术导航与放射性植入系统用导航支架的结构示意图。
41.图2为一种手术导航与放射性植入系统用导航支架的爆炸图。
42.图3为一种手术导航与放射性植入系统用导航支架中壳体的爆炸图。
43.图4为一种手术导航与放射性植入系统用导航支架中竖直伸缩架的结构示意图。
44.图5为一种手术导航与放射性植入系统用导航支架中壳体移动与锁定机构的结构示意图。
45.图6为一种手术导航与放射性植入系统用导航支架中水平伸缩架的结构示意图。
46.图7为一种手术导航与放射性植入系统用导航支架中万向连接头机构的结构示意图。
47.图中:1、壳体;2、竖直伸缩架;21、刚性链;22、链轮;23、轮座;24、升降动力机构;25、导向伸缩套筒;26、储链筒;261、锁紧滑槽;3、壳体移动与锁定机构;31、锁脚轮;32、锁紧滑块;33、锁紧架;331、横架;332、弹性伸缩杆;34、锁紧吸盘;4、水平伸缩架;41、水平滑筒;42、水平滑杆;43、滑杆伸缩机构;5、旋转机构;51、机仓;52、旋转轴;53、旋转电机;54、传动齿轮;6、万向连接头机构;61、倾角调节机构;611、倾角调节仓;612、连接杆;613、万向球;614、球座;615、连接板;616、拉丝倾角调节机构;6161、拉丝;6162、丝轮;6163、丝轮动力机构;6164、轮架;6165、轮轴;6166、拉丝电机;100、光学定位仪。
具体实施方式
48.下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
49.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
50.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制;术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性;此外,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
51.请参阅图1
‑
7,一种手术导航与放射性植入系统用导航支架,该导航支架用于固定光学定位仪100,所述导航支架包括壳体1、竖直伸缩架2、壳体移动与锁定机构3、水平伸缩架4、旋转机构5以及万向连接头机构6;
52.所述壳体1上设有容置座101,固定光学定位仪100能够收纳容置在容置座101上;
53.所述竖直伸缩架2包括刚性链21、链轮22、轮座23、升降电机24、导向伸缩套筒25以及储链筒26;
54.所述链轮22通过轮座23安装在壳体1内底部,链轮22的轮轴上传动连接升降电机24;
55.所述导向伸缩套筒25安装在壳体1内,并对应链轮22一侧设置,顶端能够伸出壳体1顶部设置的升降槽口102;所述储链筒26安装在壳体1内,并对应链轮22另一侧设置;
56.刚性链21一端内置于导向伸缩套筒25内,并通过连轴211与导向伸缩套筒25顶端固定连接,另一端绕过链轮22,与链轮22啮合传动并伸入储链筒26内;升降电机24驱动链轮22转动带动刚性链21在导向伸缩套筒25以及储链筒26内升降,进而带动导向伸缩套筒25升降;
57.所述壳体移动与锁定机构3包括带锁脚轮31、锁紧滑块32、锁紧架33以及锁紧吸盘34,
58.所述带锁脚轮31设有4个,分别安装在壳体1底部四角位置;
59.所述储链筒26外侧设有锁紧滑槽261,锁紧滑块32滑动配合在锁紧滑槽261上,
60.所述锁紧架33包括横架331以及弹性伸缩杆332;横架331与锁紧滑块32固定连接,所述锁紧吸盘34与弹性伸缩杆332一一对应设置,弹性伸缩杆332设有3个,弹性伸缩杆332呈中心对称布置在横架331下方,弹性伸缩杆332顶端连接横架331,底端连接锁紧吸盘34。
61.所述壳体1底部对应弹性伸缩杆332以及锁紧吸盘34设有锁紧槽口(图未示出);弹性伸缩杆332以及锁紧吸盘34能够通过锁紧槽口(图未示出)伸至壳体1底部。
62.所述水平伸缩架4包括水平滑筒41、水平滑杆42以及滑杆伸缩机构43;
63.所述水平滑筒41一端通过旋转机构5转动连接在导向伸缩套筒25顶部,另一端滑动配合水平滑杆42;
64.滑杆伸缩机构43设置于水平滑筒41内,与水平滑杆42连接,驱动水平滑杆42沿水平滑筒41伸缩;
65.滑杆伸缩机构43包括伸缩丝杆431以及伸缩电机432,伸缩丝杆431一端与水平滑杆42啮合传动,另一端传动连接伸缩电机432;
66.所述旋转机构5包括机仓51、旋转轴52、旋转电机53以及传动齿轮54,旋转轴52套装在机仓51外侧设置的轴承上,机仓51内旋转电机53通过传动齿轮54与旋转轴52传动连接。
67.所述水平滑筒41与旋转机构5的旋转轴52固定连接,旋转机构5的机仓51安装在导向伸缩套筒25顶部;
68.所述万向连接头机构6包括旋转机构5以及倾角调节机构61;
69.所述旋转机构5的机仓51固定在水平滑杆42前端底部;
70.所述倾角调节机构61包括倾角调节仓611、连接杆612、万向球613、球座614、连接板615以及拉丝倾角调节机构616;
71.倾角调节仓611与旋转机构5的旋转轴52固定连接;
72.所述连接杆612为中空杆件,其顶部与倾角调节仓611固定连接并连通;
73.连接杆612底端固定连接有万向球613;
74.所述连接板615顶部中间位置固定有球座614;
75.所述万向球613套装在球座614上,与球座614转动连接;
76.所述拉丝倾角调节机构616内置于倾角调节仓611中,并与连接板615连接,驱动连接板615绕万向球613调节倾角;所述光学定位仪100通过螺栓固定在连接板底部;
77.所述拉丝倾角调节机构616包括拉丝6161、丝轮6162以及丝轮动力机构6163;
78.所述拉丝6161设有3个,中心对称连接在连接板615顶部;
79.所述丝轮6162设有3个,对应中心对称设置在倾角调节仓611中;
80.拉丝6161伸入倾角调节仓611,分别一一对应绕装在丝轮6162上;
81.丝轮动力机构6163与丝轮6162一一对应设置驱动丝轮6162转动收放拉丝6161;
82.所述拉丝动力机构6163包括轮架6164、轮轴6165以及拉丝电机6166,所述丝轮6162套装在轮轴6165上,并安装在轮架6164上,轮架6164和拉丝电机6166固定在倾角调节仓611内,拉丝电机6166与轮轴6165传动连接;
83.一种手术导航与放射性植入系统用导航支架的使用方法,包括如下步骤:
84.步骤一:壳体1移动至相应位置并锁定,竖直伸缩架2从壳体1内升起带动待光学定位仪100上升至合适高度后锁定;
85.步骤二:水平伸缩架4旋转并伸缩,带动光学定位仪100进入工作区域内,并锁定;
86.步骤三:万向连接头机构6调节光学定位仪100的水平转角以及倾角,使光学定位仪100处于合适定位导航工位。
87.本发明的工作原理是:本发明用于固定光学定位仪100,能够升降、转动、水平伸缩、转角以及倾角调节,实现了实光学定位仪100全方位便捷式位置调节,有利于手术导航与放射性植入系统的快速精准导航定位;本发明进一步设计竖直伸缩架2隐藏于壳体1内的设计,并巧妙利用刚性链21和链轮22配合式的升降结构,使得升降结构简洁,便于隐藏式容置于壳体1内,在定位结束后能够收纳于壳体1内,使得壳体1顶部空间结构简洁,便于设备管理;本发明进一步设计万向连接头机构6,尤其是倾角调节机构巧妙设计成拉丝倾角调节机构,实现全方位倾角调节,利用3个抱紧状态的拉丝和以及中间的球座,锁定连接板615,而利用3个拉丝的长度变化来调节连接板615的倾角,进而调节安装在连接板的光学定位仪100的倾角;本发明进一步巧妙设计移动与锁定机构利用竖直伸缩架2为锁定提供执行动力,结构简洁,并配合设计弹性伸缩杆332,使得竖直伸缩架在锁定后依然具有一定的升降活动量,且不影响锁紧吸盘34锁定。
88.上面对本专利的较佳实施方式作了详细说明,但是本专利并不限于上述实施方式,在本领域的普通技术人员所具备的知识范围内,还可以在不脱离本专利宗旨的前提下作出各种变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。