1.本实用新型涉及一种智能循环运动检测设备,属于检测设备技术领域。
背景技术:
2.机械式电子产品的部分元件在生产出来后,需要通过设备或仪器来判断产品是否合格;人工检测的方式效率较低,并且浪费人力;而现有的检测设备一般都是采用载具往复进出的方式运动,单点检测效率较低,并且检测的部位有限,如果遇到需要双面检测的片材部件,还需要人工翻面,再进行检测,不能满足现代化高效生产的需要。
技术实现要素:
3.本实用新型目的是为了克服现有技术的不足而提供一种智能循环运动检测设备。
4.为达到上述目的,本实用新型采用的技术方案是:一种智能循环运动检测设备,包含机架,机架上设置有循环运转机构、自动翻面机构和多个检测机构,循环运转机构用于输送被检测工件,自动翻面机构用于将被检测工件翻面,检测机构用于检测被检测工件。
5.优选的,所述循环运转机构包含循环运转支架、循环运转驱动装置和输送带组件,循环运转驱动装置设置在循环运转支架上,循环运转驱动装置带动输送带组件运转,输送带组件上设置有多个工件载具。
6.优选的,所述输送带组件包含循环输送带和两个循环传动轮,循环输送带与两个循环传动轮配合,循环运转驱动装置为减速电机,循环运转驱动装置带动其中一个循环传动轮转动。
7.优选的,所述工件载具包含载具底座、载板和定位针,载板设置在载具底座上,载板与底座之间具有容纳空间,该容纳空间中设置有阻尼垫;所述定位针设置有多个,定位针的一端插入阻尼垫,另一端伸出至载板的上表面。
8.优选的,所述底座上设置有载具接气孔,载板上设置有载具吸附孔。
9.优选的,所述自动翻面机构包含翻面机构底座、翻面机构升降架和两个翻面支架,翻面机构底座上设置有升降驱动装置,升降驱动装置带动翻面机构升降架升降,翻面机构升降架上设置有往复驱动装置,往复驱动装置带动两个翻面支架相对移动,两个翻面支架上均设置有翻面机械手和翻面驱动装置,每个翻面机械手上均设置有吸取部件,翻面驱动装置带动翻面机械手转动,两个翻面支架上的翻面机械手的转动方向相反。
10.优选的,所述翻面机构升降架通过竖向的直线滑轨组件滑动设置在翻面机构底座上,升降驱动装置为减速电机,升降驱动装置通过凸轮摇臂组件带动翻面机构升降架升降。
11.优选的,所述的两个翻面支架通过横向的直线滑轨组件滑动设置在翻面机构升降架上,往复驱动装置为减速电机,往复驱动装置通过皮带带动两个翻面支架相对移动,两个翻面支架分别与皮带的上下两段连接。
12.优选的,所述自动翻面机构还包含接气支架,接气支架上设置有两个转动接气部件,两个转动接气部件各与一个翻面机械手通过气路连接,转动接气部件与相连的翻面机
械手同步转动。
13.由于上述技术方案的运用,本实用新型与现有技术相比具有下列优点:
14.本方案的智能循环运动检测设备,采用输送机构带动载治具循环运动的方式,输送机构一端上料,一端下料,配合上游和下游自动化设备,可以进行流水线式的自动检测;并且可以根据检测需要,沿着输送机构设置多套检测机构,配合自动翻面机构,可以对片材部件进行双面检测,大幅提高了检测效率,降低检测成本。
附图说明
15.下面结合附图对本实用新型技术方案作进一步说明:
16.附图1为本实用新型所述的一种智能循环运动检测设备的立体结构示意图;
17.附图2为本实用新型所述的循环运转机构的立体结构示意图;
18.附图3为本实用新型所述的循环运转机构移除部分遮挡件之后的立体结构示意图
19.附图4为本实用新型所述的工件载具的示意图;
20.附图5为本实用新型所述的工件载具的剖面示意图;
21.附图6为本实用新型所述的自动翻面机构的立体结构示意图;
22.附图7为本实用新型所述的自动翻面机构的另一角度的立体结构示意图。
具体实施方式
23.下面结合附图及具体实施例对本实用新型作进一步的详细说明。
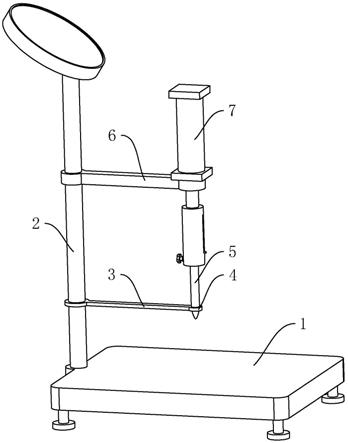
24.如图1所示,本实用新型所述的一种智能循环运动检测设备,包含机架1,机架1上设置有循环运转机构2、自动翻面机构3和多个检测机构。
25.如图2、3所示,所述循环运转机构2包含循环运转支架11、循环运转驱动装置12和输送带组件,循环运转支架11安装在机架1上,循环运转驱动装置12为减速电机,该电机安装在循环运转支架11上;所述输送带组件包含循环输送带14和两个循环传动轮15,循环输送带14与两个循环传动轮15配合,两个循环传动轮15通过轴承等结构安装在循环运转支架11上,循环运转驱动装置12通过传动组件带动其中一个循环传动轮15转动。
26.所述循环输送带14上设置有多个等间距设置的工件载具13,如图4、5所示,工件载具13包含载具底座21、载板22和定位针23,载具底座21和载板22均为方形结构,载板22设置在载具底座21上,载板22与底座21之间具有容纳空间,该容纳空间中设置有阻尼垫24;所述定位针23设置有多个,定位针23的一端插入阻尼垫24,另一端伸出至载板22的上表面;阻尼垫24可以是海绵等材料,对定位针23产生一定的固定作用,使工件载具13运转到下侧输送带时,定位针23不会从载具上掉落;多个定位针23可以插入工件自身的孔结构,对工件进行定位,也可以与工件边缘配合进行定位。
27.所述工件载具13还可以在底座21上设置载具接气孔25,并在载板22上设置载具吸附孔26,采用真空负压吸附的形式固定工件,进一步保证运载的稳定性。
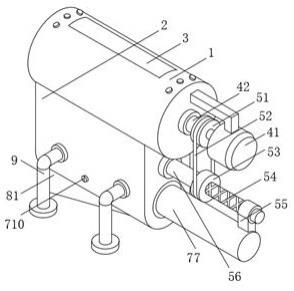
28.如图6、7所示,所述自动翻面机构3包含接气支架41、翻面机构底座31、翻面机构升降架32和两个翻面支架33,接气支架41和翻面机构底座31安装在机架1上。
29.所述翻面机构升降架32通过竖向的直线滑轨组件滑动设置在翻面机构底座31上,翻面机构底座31上设置有升降驱动装置34,升降驱动装置34为减速电机,升降驱动装置34
通过凸轮摇臂组件38带动翻面机构升降架32升降。
30.所述的两个翻面支架33通过横向的直线滑轨组件滑动设置在翻面机构升降架32上,翻面机构升降架32上设置有往复驱动装置35,往复驱动装置35为减速电机,往复驱动装置35通过皮带带动两个翻面支架33相对移动;两个翻面支架33分别与皮带的上下两段连接,使往复驱动装置35在正反转时,两个翻面支架33可以相对靠近或分离。
31.两个翻面支架33上均设置有翻面机械手36和翻面驱动装置37,每个翻面机械手36上均具有四个工作面,每个工作面上均设置有吸取部件,吸取部件一般为多个小吸盘;两个翻面机械手36的最大中心距与两个相邻的工件载具13的中心距相同;所述翻面驱动装置37为步进减速电机,翻面驱动装置37带动翻面机械手36转动,并且控制两个翻面支架33上的翻面机械手36的转动方向相反。
32.所述接气支架41上设置有两个转动接气部件42,两个转动接气部件42各与一个翻面机械手36通过气路软管连接,转动接气部件42与相连的翻面机械手36同步转动,保证气路软管不打结。
33.进行翻面动作时,升降驱动装置34先带动翻面机构升降架32下降,位于工件运动方向前侧的翻面机械手36下降并吸取载具上的工件,随后升降驱动装置34带动翻面机构升降架32上升,同时翻面驱动装置37带动翻面机械手36转动90度,使工件转动至两个翻面机械手36之间,同时往复驱动装置35带动两个翻面机械手36相靠近,后侧的机械手负压吸取前侧机械手上的工件,前侧机械手松开,随后往复驱动装置35带动两个翻面机械手36相分离,并且翻面驱动装置37再带动翻面机械手36转动90度,使后侧的机械手吸取工件的一侧向下,随后升降驱动装置34再带动翻面机构升降架32下降,后侧的机械手吸松开放下工件;在一次工件翻面过程中,载具也会向前移动一个工位,使后侧的机械手放下的工件还落在原来的载具上。
34.所述的多个检测机构根据实际检测需要设计,本实施例如图1所示,在循环运转机构2的上料侧的左右两侧各设置了一组俯拍检测工位4,并在俯拍检测工位4的后续设置了侧拍检测工位5,工件经过翻面后,再经过两个俯拍检测工位4,即可完成全方位的视觉检测;检测完成后,工件从循环运转机构2的另一端下料,载具跟随循环运转机构2的输送带回程,进行循环工作。
35.以上仅是本实用新型的具体应用范例,对本实用新型的保护范围不构成任何限制。凡采用等同变换或者等效替换而形成的技术方案,均落在本实用新型权利保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。