1.本实用新型涉及水下潜航器领域,特别是涉及一种便携式水下潜航器。
背景技术:
2.随着技术的持续发展以及消费水平的逐步提高,人们对水下领域的探测需求不断上涨。据科学的统计,近几年中国水下探测相关仪器在市场上的规模大约为582.3亿元。其中资源勘查类的水下探测相关仪器,市场占比约为41.59%;安全监测类的水下探测相关仪器,市场占比约为33.45%;搜索救援类的水下探测相关仪器,市场占比约为11.57%。除此以外,水下探测技术还广泛的应用于商业及个人娱乐、水产养殖、调查研究、铺设线缆等各个行业。
3.但是,由于海底工作环境复杂恶劣,能见度低,对设备和控制系统要求较高,同时行业供应链的不成熟,导致产品价格高昂,水下探测相关仪器的技术发展仍处于初级阶段。对于热爱水下探测的客户,小型便携的水下探测器还没有被大规模普及。
技术实现要素:
4.基于此,有必要针对上述提到的至少一个问题,提供一种便携式水下潜航器。
5.本实用新型申请提供的便携式水下潜航器,包括摄像头舱、控制舱、舵机安装舱、驱动机构和若干个舵翼,所述舵翼和所述驱动机构均设置在所述舵机安装舱内;
6.所述摄像头舱与所述控制舱可拆卸连接,所述控制舱与所述舵机安装舱可拆卸连接,所述可拆卸连接的连接处均设有橡胶密封圈;
7.所述摄像头舱为半球形,所述控制舱为圆柱形,所述舵翼为梯形片状结构,与所述舵机安装舱中的舵机可拆卸连接。
8.在其中一个实施例中,所述驱动机构包括推进电机和与所述推进电机动力连接的螺旋桨。
9.在其中一个实施例中,所述控制舱包括电池和控制电路板,所述控制电路板包括电源电路、电池电量检测电路、蜂鸣器报警电路、stm32主控制器、姿态传感器、水压水深传感器、摄像头模块、gps定位模块、无线通信模块、转向舵机驱动电路和推进电机驱动电路。
10.在其中一个实施例中,所述摄像头舱上朝向所述控制舱的端面设有第一卡接槽,所述控制舱上朝向所述摄像头舱的端面设有第一连接凸环,所述第一连接凸环与所述第一卡接槽相匹配;
11.所述控制舱上朝向所述舵机安装舱的端面设有第二连接凸环,所述舵机安装舱上朝向所述控制舱的端面设有第二卡接槽,所述第二连接凸环与所述第二卡接槽相匹配。
12.本实用新型的实施例中提供的技术方案带来如下有益技术效果:
13.本实用新型提供的便携式水下潜航器由摄像头舱、控制舱、舵机安装舱、驱动机构和若干个舵翼几个部分组成,各部分可拆卸拼接形成潜航器主体,各部分可分别制造,生产成本可实现大幅度下降,并且在使用前,便携式水下潜航器能够处于分散状态,便于携带运
输。
14.本技术附加的方面和优点将在后续部分中给出,并将从后续的描述中详细得到理解,或通过对本实用新型的具体实施了解到。
附图说明
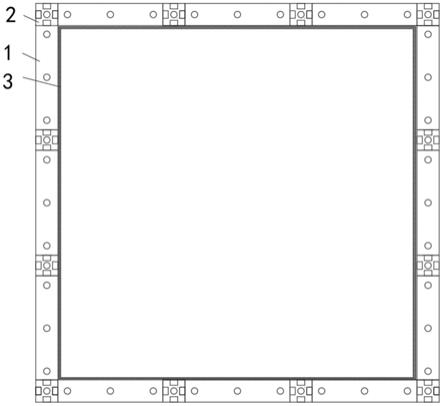
15.图1为本实用新型一实施例中便携式水下潜航器的平面结构示意图;
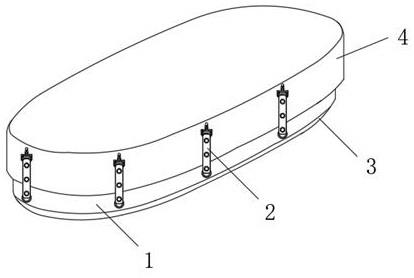
16.图2为本实用新型一实施例中便携式水下潜航器的部分立体结构示意图。
具体实施方式
17.为了便于理解本实用新型,下面将参照相关附图对本实用新型进行更全面的描述。附图中给出了本实用新型的可能的实施例。但是,本实用新型可以以许多不同的形式来实现,并不限于本文已经通过附图描述的实施例。通过参考附图描述的实施例是示例性的,用于使对本实用新型的公开内容的理解更加透彻全面,而不能解释为对本实用新型的限制。此外,如果已知技术的详细描述对于示出的本实用新型的特征是非必要技术的,则可能将这些技术细节予以省略。
18.相关领域的技术人员可以理解,除非另外定义,这里使用的所有术语(包括技术术语和科学术语),具有与本实用新型所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语,应该被理解为具有与现有技术中的意义一致的意义,并且除非像这里一样被特定定义,否则不会用理想化或过于正式的含义来解释。
19.本技术领域技术人员可以理解,除非特意声明,这里使用的单数形式“一”、“一个”、“所述”和“该”也可包括复数形式。应该进一步理解的是,本技术的说明书中使用的措辞“包括”是指存在所述特征、整数、步骤、操作、元件和/或组件,但是并不排除存在或添加一个或多个其他特征、整数、步骤、操作、元件、组件和/或它们的组。应该理解,这里使用的措辞“和/或”包括一个或更多个相关联的列出项的全部或任一单元和全部组合。
20.下面以具体地实施例对本实用新型的技术方案以及该技术方案如何解决上述的技术问题进行详细说明。
21.本实用新型申请提供的便携式水下潜航器,如图1和图2所示,包括摄像头舱100、控制舱200、舵机安装舱300、驱动机构400和若干个舵翼500,舵翼500和驱动机构400均设置在舵机安装舱300内;
22.摄像头舱100与控制舱200可拆卸连接,控制舱200与舵机安装舱300可拆卸连接,可拆卸连接的连接处均设有橡胶密封圈;摄像头舱100为半球形,控制舱200为圆柱形,舵翼500为梯形片状结构,与舵机安装舱300中的舵机可拆卸连接。舵机安装舱300的舵机为180度转向的舵机。
23.本实用新型提供的便携式水下潜航器由摄像头舱100、控制舱200、舵机安装舱300、驱动机构400和若干个舵翼500几个部分组成,各部分可拆卸拼接形成潜航器主体,各部分可分别制造,生产成本可实现大幅度下降,并且在使用前,便携式水下潜航器能够处于分散状态,便于携带运输。
24.可选的,驱动机构400包括推进电机和与推进电机动力连接的螺旋桨。驱动机构
400可具体选用螺旋桨作为主要动力单元,螺旋桨较为常见,生产成本较低。
25.可选的,控制舱200包括电池和控制电路板,控制电路板包括电源电路、电池电量检测电路、蜂鸣器报警电路、stm32主控制器、姿态传感器、水压水深传感器、摄像头模块、gps定位模块、无线通信模块、转向舵机驱动电路和推进电机驱动电路。控制舱200中的电池可以为可拆卸的3s航模电池,作为电源给潜航器供电。更具体地,控制舱200电源电路包括稳压电路、 5v降压电路和 3.3v降压电路,稳压电路采用合适规格的滤波电容减少干扰; 5v电压用以给舵机驱动电路供电; 3.3v电压用以给主控芯片和传感器供电。
26.控制舱200控制电路板电池电量检测电路通过adc采集接口和stm32主控制器连接。控制舱200控制电路板蜂鸣器报警电路用于电量不足、潜航器受损、通信异常等鸣叫报警提示。控制舱200控制电路板姿态传感器mpu9250通过iic协议与stm32主控制器连接,用于获取潜航器三轴陀螺仪、三轴加速度、三轴磁场等数据。控制舱200控制电路板水深水压传感器通过iic协议与stm32主控制器连接,用于获取潜航器航行深度数据。
27.控制舱200的gps定位模块通过串口与stm32主控制器连接,用于获取潜航器浮出水面时经纬度数据,用于定位或修正潜航器位置。控制舱200的无线通信模块可包括蓝牙模块,该蓝牙模块通过串口与stm32主控制器连接,可用于修改潜航器pid控制参数,便于进行潜航器姿态平稳调整。无线通信模块可通过spi协议与stm32主控制器连接,用于潜航器浮出水面或在浅水区域时接收遥控器控制信号。
28.可选的,如图2所示,摄像头舱100上朝向控制舱200的端面设有第一卡接槽(图中未示出),控制舱200上朝向摄像头舱100的端面设有第一连接凸环210,第一连接凸环210与第一卡接槽相匹配;控制舱200上朝向舵机安装舱300的端面设有第二连接凸环220,舵机安装舱300上朝向控制舱200的端面设有第二卡接槽310,第二连接凸环220与第二卡接槽310相匹配。通过相匹配的卡接槽与连接凸环,可确保相连接的两个模块化舱段能够牢固准确地连接,形成连贯的一体化结构。本技术中提到的可拆卸连接,可具体采用螺钉进行,螺钉可从便携式水下潜航器的外表面钉入到连接部位所在的潜航器内部,比如在连接凸环和卡接槽上设置相对应的螺纹孔,将螺钉旋入其中,实现两个舱段的连接。当然,连接凸环与卡接槽的设置位置可以对调,并不限定于只在控制舱200上设置连接凸环,也可设置为卡接槽。
29.便携式水下潜航器的总机体组合安装后呈现为鱼雷状,总机体分别由摄像头舱100、控制舱200、舵机安装舱300、舵翼500、尾部推进电机安装孔槽等部分组成,摄像头舱100、控制舱200、舵机安装舱300、舵翼500、尾部推进电机安装孔槽均可由3d打印生产制造,各舱之间均留有用于对接的固定孔槽,且各舱接口处设有橡胶密封圈安装槽,橡胶密封圈可以防止接口处渗水。舵机安装舱300位于潜航器总机体中部偏后位置,舵机安装舱300内打印了四个舵机固定槽口,并设有专门的舵机固定孔,可由固定螺丝固定。
30.摄像头舱100为半球形结构,摄像头舱100安装摄像头可进行水下拍照、摄像。摄像头舱100可具体采用亚克力材料制作,以减轻舱体重量,并确保光线通过。摄像头舱100摄像头为高清水下摄像头,可以拍摄水面以下的景象。
31.控制舱200为圆柱形结构,控制舱200安装有电池和控制电路板,控制电路板包括电源电路、电池电量检测电路、蜂鸣器报警电路、stm32主控制器、姿态传感器、水压水深传感器、摄像头模块、gps定位模块、无线模块、蓝牙模块、转向舵机驱动电路和推进电机驱动
电路。
32.舵翼500为梯形片状结构,舵翼500上打印有孔槽,可与舵机通过螺丝固定。尾部推进电机安装孔槽用以安装和固定推进电机,推进电机可采用单转向电机,降低生产成本,启动时只能单向推进,通过舵翼500来控制整个装置的行进方向。推进电机固定在潜航器机体模型的尾部,推进电机上安装有螺旋桨,通过螺旋桨与水作用产生推力。水下潜航器的运动控制包括浅水区或水面的遥控引导和水下预置程序控制。
33.本实用新型申请还相应提供了一种水下潜航器的控制系统,包括遥控器和pc端水下潜航器综合管理控制平台和如前文描述的便携式水下潜航器,以下可简称潜航器。潜航器和遥控器之间通过无线模块连接,pc端水下潜航器综合管理控制平台和遥控器之间通过usb数据线连接,潜航器和pc端水下潜航器综合管理控制平台通过蓝牙模块连接。
34.控制舱200的gps定位模块,在潜航器正式运行期间,潜航器中gps的经纬度数据由stm32主控制器获取后通过无线模块传输给遥控器,遥控器获取数据后通过usb数据线连接电脑,将数据上传至pc端水下潜航器综合管理控制平台,pc端水下潜航器综合管理控制平台可以对遥控器进行固件升级;在调试、校准期间,潜航器和pc端水下潜航器综合管理控制平台通过蓝牙模块连接,潜航器将姿态深度等数据上传至pc端水下潜航器综合管理控制平台,pc端水下潜航器综合管理控制平台可以对潜航器运行参数进行调整。
35.gps定位数据的上传,是在潜航器浮出水面时进行的,潜航器在水面下时gps无信号。遥控器为用于与潜航器通过固定频段的无线模块建立远距离通信。
36.pc端水下潜航器综合管理控制平台为pc端开发系统,可用于动态显示潜航器姿态、深度,可用于显示潜航器在地图中的位置,可用于参数调整,数据动态曲线获取和硬件设备固件升级。当潜航器浮出水面时,电量和经纬度信息会通过遥控器上传至pc端水下潜航器综合管理控制平台,潜航器会显示在地图上,可以用于航线校准。
37.本技术领域技术人员可以理解,本技术中术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,除非另有说明,“多个”的含义是两个或两个以上。
38.在本技术的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本技术中的具体含义。
39.在本说明书的描述中,具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
40.以上所述仅是本技术的部分实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本技术原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本技术的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。