1.本技术涉及管道检测的技术领域,尤其是涉及一种地下管道探测装置。
背景技术:
2.地下管道是敷设在地下用于输送液体、气体或松散固体的管道。地下管道完成敷设后需对管道内部进行探测,并在验收合格后才能使用。
3.普遍的,通常采用遥控小车进行管道内部的探测,通过在遥控小车上安装摄像头,工作人员位于管道端口处控制遥控小车进入管道内,通过摄像头传输的管道内的画面,判断管道内壁是否出现破损裂痕,同时通过观察管道内的画面控制小车行驶直至驶出管道端口。
4.针对上述中的相关技术,发明人认为存在有以下缺陷:由于管道埋设于地下且长度较长,易因信号较差使得对遥控小车的控制失灵,导致管道检测的难度较大。
技术实现要素:
5.为了方便工作人员对地下管道进行探测,本技术提供了一种地下管道探测装置。
6.本技术提供的一种地下管道探测装置。采用如下的技术方案:
7.一种地下管道探测装置,包括飞行器和摄像头,所述摄像头安装在飞行器的表面,所述飞行器包括主机体以及驱动系统,所述驱动系统用于驱动主机体,驱动系统通信连接有防撞装置,所述防撞装置与主机体固定且防撞装置位于主机体的中心处,所述防撞装置包括用于发射雷达波信号的雷达波模块。
8.通过采用上述技术方案,当使用飞行器对管道进行检测时,先将摄像头固定在飞行器的表面,使摄像头朝向管道延伸的方向,启动飞行器并调节好飞行器的飞行速度,使得飞行器以较为缓慢的速度飞行。
9.将飞行器放置于管道端口的中心处,使得飞行器与管道内壁之间留有空间,飞行器缓慢向管道内飞去,飞行过程中,雷达波模块持续发出雷达波信号至管道内壁,而管道内壁将雷达波信号发射回雷达波模块,雷达波模块通过计算雷达波信号自发射到接收的所需的时间,进而测出其与管道内壁的距离并发出控制信号至驱动系统。
10.当飞行器上、下、前、后、左、右任一侧与管道内壁距离过近时,雷达波模块发出控制信号至驱动系统,驱动系统接收到控制信号后驱动飞行器朝远离自身与管道内壁较为接近的一侧飞行,通过防撞装置的调节,使得飞行器在前进过程中均处于管道较为中心的位置,最终从管道尾端出口飞出,摄像头记录飞行全程的画面,飞行器在管道内自动避障飞行,方便工作人员对地下管道进行探测。
11.可选的,所述主机体包括机壳以及若干翼臂,所述翼臂与机壳固定且若干翼臂绕机壳的轴线均分部分,所述翼臂远离机壳的一端朝远离机壳的一端延伸,所述防撞装置与机壳固定连接。
12.通过采用上述技术方案,由于若干翼臂的延伸方向均不一致,将防撞装置与机壳
固定连接的设置,使得雷达波模块发出雷达波信号至管道内壁的距离较为接近,使得飞行器更易维持在管道的中间位置。
13.可选的,所述翼臂远离机壳的一端固定有电机,所述电机的输出轴同轴固定有旋翼,驱动系统用于同时控制多个电机或单独驱动一个电机的转动频率。
14.通过采用上述技术方案,电机驱动旋翼转动产生气流,进而实现飞行器的飞行,驱动系统通过接收到的雷达波模块输出的控制信号后进行数据处理,并输出驱动信号控制电机的转动频率,当飞行器需要在水平方向进行平移以调整位置时,驱动系统发出驱动信号以提升与墙面较为靠近的电机的转动频率,电机转速加快使得旋翼受到气流的反作用力较大,且由于惯性影响,主机体朝远离管道内壁的方向移动,当飞行器需进行竖直方向的移动时,驱动系统发出驱动信号控制多个电机同时提升转动频率或同时降低转动频率,进而实现主机体的整体升降。
15.可选的,所述摄像头通过无线网络连接有显示组件,所述显示组件包括显示屏,所述显示屏与摄像头通信连接。
16.通过采用上述技术方案,工作人员位于管道端口处放入飞行器,飞行器在管道内缓慢移动并将摄像头拍摄的管道内壁画面传输至显示屏上,方便工作人员对管道内壁的情况进行实时观察。
17.可选的,所述显示组件安装有用于远程发射换向信号的信号发射器,所述飞行器还包括用于接收换向信号的信号接收器。
18.通过采用上述技术方案,当工作人员通过显示屏看到飞行器接近导管尾端时,通过控制信号发射器发出换向信号使得飞行器从尾端反方向飞回原端口处,使得工作人员方便收回飞行器。
19.可选的,所述机壳安装有水平设置的探照灯。
20.通过采用上述技术方案,探照灯的设置,增加管道内的光照亮度,方便工作人员进行管道内壁的实时观察。
21.可选的,所述防撞装置包括若干红外测距传感器,所述红外测距传感器分别固定在机壳的顶部、底部以侧壁,所述红外测距传感器的发射端朝向管道的内壁,所述红外测距传感器与驱动系统通信连接。
22.通过采用上述技术方案,利用多个红外测距传感器分别发出不同方向的红外射线,红外射线发射至管道内壁表面形成反射并被红外测距传感器接收,红外测距传感器通过判断红外线从发射至反射后接收的时间,进而计算出飞行器与管道内壁的距离并发出控制信号至驱动系统,驱动系统接收到控制信号并控制电机的转动频率,实现飞行器位置的调整。
23.可选的,所述摄像头固定在机壳的底部,所述摄像头的两侧设置有支撑架,所述支撑架与机壳的底部固定,当支撑架与地面抵接时,所述摄像头与地面留有空间。
24.通过采用上述技术方案,当支撑架与地面抵接时,所述摄像头与地面留有空间的设置,飞行器降落时,支撑架对摄像头起到保护作用。
25.综上所述,本技术包括以下至少一种有益技术效果:
26.1.通过超声波测距电路的转速调节,使得飞行器在前进过程中均处于管道较为中心的位置,并且最终从管道尾端出口飞出,摄像投记录飞行全程的画面,方便工作人员对地
下管道进行探测;
27.2.将防撞装置与机壳固定连接的设置,使得雷达波模块发出雷达波信号至管道内壁的距离较为接近,使得飞行器更易维持在管道的中间位置;
28.3.飞行器在管道内缓慢移动并将摄像头拍摄的管道内壁画面传输至显示屏上,方便工作人员对管道内壁的情况进行实时观察。
附图说明
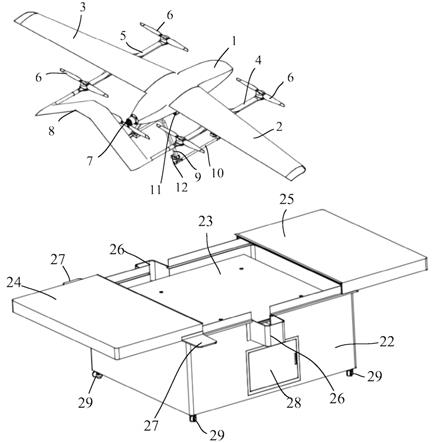
29.图1是实施例1的整体结构示意图;
30.图2是实施例2的整体结构示意图。
31.附图标记说明:1、主机体;11、机壳;12、翼臂;2、电机;3、旋翼;4、摄像头;5、支撑架;6、防撞装置;7、红外测距传感器;8、显示屏;9、探照灯。
具体实施方式
32.为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图1
‑
2及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本技术,并不用于限定本技术。
33.本技术实施例公开一种地下管道探测装置。
34.实施例1:
35.参照图1,地下管道探测装置包括飞行器、显示组件以及摄像头4,摄像头4通过螺栓与飞行器固定,显示组件包括显示屏8以及信号发射器,显示组件与摄像头4通信连接,显示屏8用于接收摄像头4实时拍摄的画面,信号发射器用于远程发射换向信号,飞行器内固定有用于接收换向信号的信号接收器,飞行器接收到换向信号后原路返回至管道的端口处。
36.飞行器包括主机体1以及驱动系统,驱动系统用于驱动主机体1沿竖直方向或水平方向平移,主机体1包括机壳11以及4个翼臂12,翼臂12与机壳11固定且4个翼臂12绕机壳11的轴线均分部分,翼臂12远离机壳11的一端朝远离机壳11的一端水平延伸;摄像头4位于机壳11的底部,摄像头4的两侧设置有支撑架5,支撑架5与机壳11的底部固定,当支撑架5与地面抵接时,摄像头4与地面留有空间,支撑架5对摄像头4起到保护作用。
37.机壳11固定有水平设置的探照灯9,探照灯9位机壳11的侧壁,探照灯9增加管道内的光照亮度,方便工作人员进行管道内壁的实时观察。
38.翼臂12远离机壳11的一端固定有电机2,电机2的输出轴同轴固定有旋翼3,驱动系统用于同时控制多个电机2或单独驱动一个电机2的转动频率 ,驱动系统通信连接有防撞装置6,防撞装置6与接口固定且防撞装置6位于机壳11顶端面中心处,本实施例中,防撞装置6为防撞雷达,除本实施例外,防撞装置6还可以为毫米波雷达传感器、毫米波雷达,防撞雷达包括雷达波模块,雷达波模块持续发出雷达波信号至管道内壁,而管道内壁将雷达波信号发射回雷达波模块,雷达波模块通过计算雷达波信号自发射到接收的所需的时间,进而测出其与管道内壁的距离并发出控制信号至驱动系统。
39.实施例1的实施原理为:当使用飞行器对管道进行检测时,先将摄像头4固定在机壳11的底部,使摄像头4朝向管道延伸的方向,启动飞行器并调节好飞行器的飞行速度,使
得飞行器以较为缓慢的速度飞行。
40.将飞行器放置于管道端口的中心处,使得飞行器与管道内壁之间留有空间,飞行器缓慢向管道内飞去,飞行过程中,雷达波模块持续发出雷达波信号至管道内壁,而管道内壁将雷达波信号发射回雷达波模块,雷达波模块通过计算雷达波信号自发射到接收的所需时间,进而测出飞行器与管道内壁的距离并发出控制信号至驱动系统。
41.当飞行器上、下、前、后、左、右任一侧与管道内壁距离过近时,雷达波模块发出控制信号至驱动系统,驱动系统接收到控制信号后驱动飞行器朝远离自身与管道内壁较为接近的一侧飞行,飞行器处于管道较为中心的位置飞行并最终从管道尾端出口飞出,工作人员通过显示屏8观察实时观察管道内的画面。
42.实施例2:
43.参照图2,本实施例与实施例1的不同之处仅在于防撞装置6包括6个红外测距传感器7,6个红外测距传感器7分别固定在机壳11的顶部、底部以机壳11的侧壁,红外测距传感器7的发射端朝向管道的内壁,红外测距传感器7与驱动系统通信连接。
44.实施例2的实施原理为:利用6个红外测距传感器7分别朝机壳11的顶部、底部、外侧壁的方向发出红外射线,红外射线发射至管道内壁表面形成反射并被红外测距传感器7接收,红外测距传感器7通过判断红外线从发射至反射后接收的时间,进而计算出飞行器与管道内壁的距离并发出控制信号至驱动系统,驱动系统接收到控制信号并控制电机2的转动频率,实现飞行器位置的调整。
45.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,本说明书(包括摘要和附图)中公开的任一特征,除非特别叙述,均可被其他等效或者具有类似目的的替代特征加以替换。即,除非特别叙述,每个特征只是一系列等效或类似特征中的一个例子而已。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。