1.本实用新型涉及无人机技术领域,具体涉及一种无人机自动收桨机构。
背景技术:
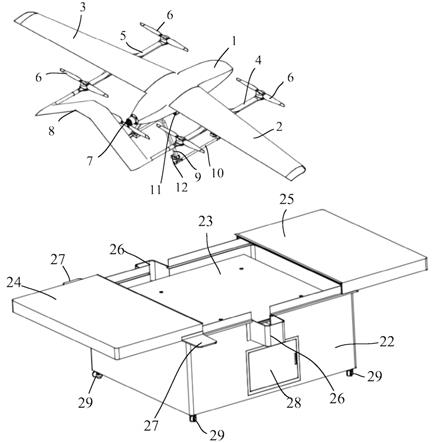
2.随着无人机制造技术和控制技术的发展,越来越多的领域引入了无人机的应用,现有无人机搭载云台相机,在进行常规观察、监视的时候需要飞到目标区域附近控制云台方位确定目标位置大概方位再进行定位、放大、定位再继续放大,步骤多,单点进行监视的时候操作复杂度不大,但需要无人机进行多点定位巡检的时候缺乏高效定位从而进行巡检的方法,多点定位巡检时需反复进行调节且对已经进行巡检过的位置不具有记忆功能,再次巡检时需进行二次调节才可进行巡检,效率低。多旋翼无人值守系统属于新兴应用模式,通过其应用,可减少人员投入,提高作业效率,为多旋翼无人机大面积推广提供有力保障,为诸如高速公路、城市道路、安防仓库、石油管道、海岸巡查等应用环境提供了一种更便捷、智能的解决方案。
3.对于多旋翼无人机在返回停机舱内,无人机的螺旋桨的摆动角度往往无法满足停机舱内的需求,缺少一种远距离自动调整无人机螺旋桨位置的机构。
技术实现要素:
4.为此,本实用新型提供一种无人机自动收桨机构,以解决现有技术中的上述问题。
5.为了实现上述目的,本实用新型提供如下技术方案:
6.根据本实用新型的第一方面,一种无人机自动收桨机构,包括横梁、滑块、驱动装置和摆动杆,所述滑块的下表面滑动连接在所述横梁上,所述滑块的上表面固定有所述驱动装置,所述摆动杆连接在所述驱动装置的动力输出端,所述摆动杆可相对所述滑块摆动。
7.进一步地,所述驱动装置为舵机,所述摆动杆的一端与所述舵机的输出轴传动连接,所述摆动杆的另一端伸出至所述横梁的旁侧。
8.进一步地,还包括第一滑轨,所述横梁的上表面上固定有所述第一滑轨,所述滑块的下表面设置有第一滑槽,所述第一滑槽滑动连接在所述第一滑轨上。
9.进一步地,所述第一滑轨为矩形截面的长条形轨道结构。
10.进一步地,还包括第二滑轨,所述横梁的上表面上固定有所述第二滑轨,所述滑块的下表面设置有第二滑槽,所述第二滑槽滑动连接在所述第二滑轨上。
11.进一步地,所述第二滑轨为半圆形截面的长条形轨道结构。
12.进一步地,所述第二滑轨为两个,两个所述第二滑轨分别设置在所述第一滑轨的两侧。
13.进一步地,两个所述第二滑轨的结构完全相同,两个所述第二滑轨关于所述第一滑轨的纵向中心面对称设置。
14.进一步地,所述第一滑轨以及所述第二滑轨的长度延伸方向相互平行。
15.进一步地,所述摆动杆的位于初始位置时,所述摆动杆垂直于所述第一滑轨的长
度延伸方向。
16.本实用新型具有如下优点:通过本实用新型的一种智能无人机自动收桨机构,主要应用于无人机智能停机舱内部,当无人机作业完毕返回舱内时,无人机自动收桨系统会自动将无人机螺旋桨摆至合适的位置,完成无人机的收舱。本机构的主要特点是智能化、自动化、方便快捷,减少了人工操作的时间。
附图说明
17.为了更清楚地说明本实用新型的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引伸获得其它的实施附图。
18.本说明书所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本实用新型可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本实用新型所能产生的功效及所能达成的目的下,均应仍落在本实用新型所揭示的技术内容得能涵盖的范围内。
19.图1为本实用新型一些实施例提供的一种无人机自动收桨机构的立体图。
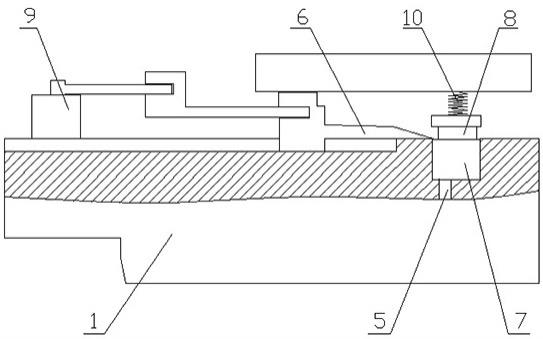
20.图2为本实用新型一些实施例提供的一种无人机自动收桨机构的主视图。
21.图3为本实用新型一些实施例提供的一种无人机自动收桨机构的俯视图。
22.图中:1、横梁,2、滑块,3、驱动装置,4、摆动杆,5、第一滑轨,6、第二滑轨。
具体实施方式
23.以下由特定的具体实施例说明本实用新型的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本实用新型的其他优点及功效,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
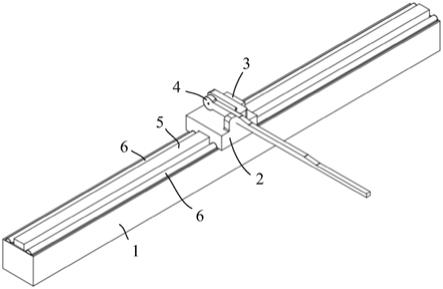
24.如图1至图3所示,本实用新型第一方面实施例中的一种无人机自动收桨机构,包括横梁1、滑块2、驱动装置3和摆动杆4,滑块2的下表面滑动连接在横梁1上,滑块2的上表面固定有驱动装置3,摆动杆4连接在驱动装置3的动力输出端,摆动杆4可相对滑块2摆动。
25.在上述实施例中,需要说明的是,本实施例的驱动装置3可以为电机、气缸、液压缸或者舵机,摆动杆4直接设置在驱动装置3的动力输出端,当驱动装置3为电机或舵机时,摆动杆4通过偏心轮连接在电机或舵机的动力输出轴上,当驱动装置3为液压缸或者是气缸时,可通过连杆机构驱动摆动杆4摆动,此外,驱动装置3还可为电推杆;此外,还包括控制器,驱动装置3通过无线传输模块与控制器电连接,控制器内可设置自动调整程序或通过按键方式进行调整。
26.上述实施例达到的技术效果为:通过本实施例的一种智能无人机自动收桨机构,主要应用于无人机智能停机舱内部,当无人机作业完毕返回舱内时,无人机自动收桨系统会自动将无人机螺旋桨摆至合适的位置,完成无人机的收舱。本机构的主要特点是智能化、
自动化、方便快捷,减少了人工操作的时间。
27.可选的,如图1至图3所示,在一些实施例中,驱动装置3为舵机,摆动杆4的一端与舵机的输出轴传动连接,摆动杆4的另一端伸出至横梁1的旁侧。
28.上述可选的实施例的有益效果为:通过将驱动装置3设置为舵机,结构简单,能够快速的推动无人机的螺旋桨摆动至指定位置。
29.可选的,如图1至图3所示,在一些实施例中,还包括第一滑轨5,横梁1的上表面上固定有第一滑轨5,滑块2的下表面设置有第一滑槽,第一滑槽滑动连接在第一滑轨5上。
30.上述可选的实施例的有益效果为:通过设置第一滑轨5,便于调整滑块2的位置。
31.可选的,如图1至图3所示,在一些实施例中,第一滑轨5为矩形截面的长条形轨道结构。
32.上述可选的实施例的有益效果为:通过将第一滑轨5设置为矩形截面的长条形轨道结构,对滑块2的滑动调节稳定。
33.可选的,如图1至图3所示,在一些实施例中,还包括第二滑轨6,横梁1的上表面上固定有第二滑轨6,滑块2的下表面设置有第二滑槽,第二滑槽滑动连接在第二滑轨6上。
34.在上述可选的实施例中,需要说明的是,第一滑轨5设置在横梁1的中心位置处。
35.上述可选的实施例的有益效果为:通过设置第二滑轨6,增强了滑块2滑动的稳定性。
36.可选的,如图1至图3所示,在一些实施例中,第二滑轨6为半圆形截面的长条形轨道结构。
37.在上述可选的实施例中,需要说明的是,此外,第二滑轨6的截面形状还可为半圆形。
38.上述可选的实施例的有益效果为:通过将第二滑轨6的截面设置为半圆形,滑块2的滑动阻力小。
39.可选的,如图1至图3所示,在一些实施例中,第二滑轨6为两个,两个第二滑轨6分别设置在第一滑轨5的两侧。
40.可选的,如图1至图3所示,在一些实施例中,两个第二滑轨6的结构完全相同,两个第二滑轨6关于第一滑轨5的纵向中心面对称设置。
41.上述可选的实施例的有益效果为:通过本实施例的设置,滑块2的受力更加均匀。
42.可选的,如图1至图3所示,在一些实施例中,第一滑轨5以及第二滑轨6的长度延伸方向相互平行。
43.上述可选的实施例的有益效果为:通过本实施例的设置,滑块2能够顺畅的在第一滑轨5以及第二滑轨6滑动。
44.可选的,如图1至图3所示,在一些实施例中,摆动杆4的位于初始位置时,摆动杆4垂直于第一滑轨5的长度延伸方向。
45.上述可选的实施例的有益效果为:实现了对螺旋桨位置的有效调整。
46.虽然,上文中已经用一般性说明及具体实施例对本实用新型作了详尽的描述,但在本实用新型基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本实用新型精神的基础上所做的这些修改或改进,均属于本实用新型要求保护的范围。
47.本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”等的用语,亦仅为便于叙述的明了,而非用以限定本实用新型可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本实用新型可实施的范畴。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。