1.本发明涉及稻蟹养殖设备技术领域,尤其涉及一种基于稻蟹的半自动化养殖设备及其养殖方法。
背景技术:
2.稻田养殖河蟹,是利用稻田的生态环境,辅以人为的管理措施,既种植水稻,又养殖河蟹,充分利用自然资源,挖掘稻田的生产潜力,达到稻蟹双增收的目的。近年来,在水稻田里进行扣蟹的培育和成蟹的养殖越来越多,成效显著。稻蟹种养实现了种植业与养殖业的有机融合,开拓创新了一种农业综合生产新模式,丰富了现代农业的发展内涵,增强优质农产品和水产品的市场竞争力,促进了现代农业持续健康发展。
3.在实际养殖过程中,稻蟹在陆地上并不太摄食,往往将岸上食物拖至水下或洞穴边,再行摄食。周年中稻蟹除低温蛰居暂不进食外,即使冬季洄游也照常摄食。在水质良好,水温适宜,饵料丰盛时,稻蟹食量很大,一昼夜可连续捕食数只螺类,刚蜕皮的软壳蟹,肢残个体,也常遭受侵害,但稻蟹耐饥能力也很强,断食10天乃至半月不食,稻蟹也不致饿死。在人工养殖条件下,根据稻蟹生长发育所需,在投喂饵料的掌握“精
‑
粗
‑
精”的结构,有利于稻蟹生长。
4.目前,关于针对稻蟹养殖的设备并不多见,多是以放养式进行养殖,这样的方法在具体应用时需要大量的人力物力,如果人员不足的情况下很难照顾过来的,另一方面,现有技术中的,稻蟹养殖设备使用时并不方便,并没有对稻蟹养殖环境有效改善,难以形成更为专业的养殖方法,因此,急需一种较为专业的稻蟹养殖设备解决上述问题。
技术实现要素:
5.本发明克服了现有技术的不足,提供一种基于稻蟹的半自动化养殖设备及其养殖方法。
6.为达到上述目的,本发明采用的技术方案为:一种基于稻蟹的半自动化养殖设备,包括:设置在搅拌机构下部的投喂机构。
7.所述搅拌机构包括:设置在物料箱内的搅拌组件,所述搅拌组件包括:设置在所述物料箱上部的驱动电机,所述驱动电机下方设置搅拌轴,沿所述搅拌轴轴线方向从上至下依次设置若干组搅拌叶片,所述驱动电机一侧设置进料通道,所述进料通道与所述物料箱连通。
8.所述投喂机构包括:设置在所述物料箱底部的若干送料管,所述送料管底部设置旋转轴,所述旋转轴通过固定块连接在所述送料管内侧,且所述旋转轴与所述送料管之间具有一定空间,所述旋转轴底端连接稻蟹进食构件。
9.本发明一个较佳实施例中,所述稻蟹进食构件包括:固定在旋转轴底端的若干螺旋叶片,且相邻的两个所述螺旋叶片组成稻蟹栖居穴。
10.本发明一个较佳实施例中,在所述物料箱底部设置漂浮筒,所述漂浮筒内设置有
智能充气泵。
11.本发明一个较佳实施例中,若干所述送料管等角度分布在所述物料箱底面。
12.本发明一个较佳实施例中,所述搅拌叶片整体为扇形状,且所述搅拌叶片具有一定扭转角度。
13.本发明一个较佳实施例中,在所述物料箱底部设置固定锚,所述固定锚通过铰链连接所述物料箱。
14.本发明采用的另一种技术方案为:一种基于稻蟹的半自动化养殖设备的养殖法,包括以下步骤:
15.步骤s1:将若干个养殖设备以线性阵列方式布置在水稻田内,人工通过进料通道向物料箱内添加各种稻蟹专用饲料。
16.步骤s2:稻蟹专用饲料添加完毕,智能充气泵将漂浮筒内气体排出一部分,养殖设备整体下降,直至进水孔整体进入水面以下,物料箱外的水进入物料箱内,驱动电机驱动搅拌轴转动,将稻蟹专用饲料与水混合在一起,同时将饲料混合水推送至送料管。
17.步骤s3:饲料混合水经过送料管进入稻蟹进食构件内,当水流经过螺旋叶片时,对螺旋叶片具有一定的作用力,驱动螺旋叶片旋转,饲料混合水扩散至附近水域,吸引稻蟹进食。
18.本发明一个较佳实施例中,所述步骤s2中,当驱动电机逆时针旋转时,搅拌叶片只对稻蟹专用饲料和水起到搅拌作用;当驱动电机顺时针旋转时,搅拌叶片对饲料混合水同时起到搅拌作用和推送作用。
19.本发明一个较佳实施例中,在各个行列的养殖设备之间留有工作通道。
20.本发明一个较佳实施例中,在所述物料箱侧面设置进水孔,当所述漂浮筒完全充满气体时,所述进水孔整体处于水面上方,且与水面距离为5
‑
15mm;当所述漂浮筒气体排出一部分时,所述进水孔整体进入水面以下,且与水面距离为15
‑
25mm。
21.本发明解决了背景技术中存在的缺陷,本发明具备以下有益效果:
22.(1)本发明通过固定在旋转轴底端的若干螺旋叶片,能够形成多个进食槽,为稻蟹提供多个进食空间,避免稻蟹之间相互乱串、争夺食物,有效改善稻蟹的进食环境,另一方面,将若干个养殖设备以线性阵列方式布置在水稻田内,进一步实现水稻田内的各个投喂机构均匀分布,保证水稻田内的稻蟹能够均匀分布,进一步改善稻蟹的养殖环境。
23.(2)本发明当物料箱内的饲料混合水随着水流进入稻蟹进食构件时,会对螺旋叶片起到一定的推动作用力,由于搅拌叶片具有一定扭转角度,能够驱动稻蟹进食构件迅速旋转,使饲料混合水进一步向稻蟹进食构件附近扩散,起到一定的吸引作用,使稻蟹主动去稻蟹进食构件位置处进食;同时,利用稻蟹构件吸引稻蟹进食的作用,可以进一步实现诱捕的效果,更方便捕捞人员捕捞,提高养殖人员的捕捞效率。
24.(3)本发明通过充气筒的充气和排气实现设备的整体上升和下移,使水稻田内的水快速进入物料箱内,实现对稻蟹专用饲料的混合搅拌,通过在物料箱内设置的搅拌组件,能够对物料箱内的稻蟹专用饲料起到一定的搅拌作用,使稻蟹专用饲料在进入送料管的时候实现各种专用稻蟹专用饲料的均匀混合,从而使稻蟹得到养分更均匀的稻蟹专用饲料,同时,在水中搅拌稻蟹专用饲料,远比颗粒状态下混合更均匀。
25.(4)本发明将搅拌组件设置为两种旋转状态,当逆时针旋转时,仅仅对稻蟹专用饲
料和水起到搅拌作用,当顺时针旋转时,会对物料箱内的混合稻蟹专用饲料起到一定的推送作用,当稻蟹专用饲料和水混合均匀之后,再将饲料混合水推送至送料管内,能够自动化实现稻蟹专用饲料的投喂,有效节约大量人力物力。
26.(5)本发明通过在物料箱底部设置的固定锚,能够对整体设备起到一定的位置固定作用,使多个设备能够稳定在水稻田中。
附图说明
27.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
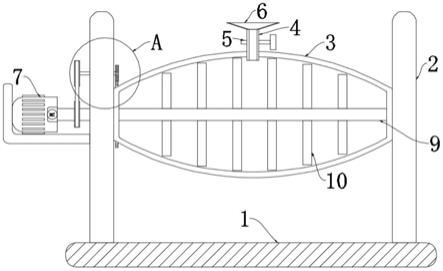
28.图1为本发明优选实施例的立体结构图;
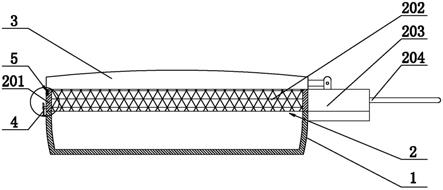
29.图2为本发明优选实施例的剖面示意图;
30.图3为本发明优选实施例的俯视图;
31.图4为图1中a处的放大示意图;
32.图5为本发明优选实施例养殖设备在水稻田内的分布示意图。
33.具体地,100
‑
水稻田,110
‑
工作通道,210
‑
物料箱,211
‑
送料管,212
‑
旋转轴,213
‑
进水孔,214
‑
进料通道,220
‑
驱动电机,221
‑
搅拌轴,222
‑
搅拌叶片,230
‑
固定块,240
‑
稻蟹进食构件,241
‑
螺旋叶片,242
‑
稻蟹栖居穴,250
‑
漂浮筒,260
‑
固定锚,261
‑
铰链。
具体实施方式
34.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
35.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
36.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或隐含指明所指示的技术特征的数量。因此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明创造的描述中,除非另有说明,“多个”的含义是两个或两个以上。
37.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以直接相连,也可以通过中间媒介间接相连,可以是两
个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本发明中的具体含义。
38.如图1所示,一种基于稻蟹的半自动化养殖设备及其养殖方法,包括:设置在搅拌机构下部的投喂机构。
39.如图2和图3所示,搅拌机构包括:设置在物料箱210内的搅拌组件,搅拌组件包括:设置在物料箱210上部的驱动电机220,驱动电机220下方设置搅拌轴221,沿搅拌轴221轴线方向从上至下依次设置若干组搅拌叶片222,驱动电机220一侧设置进料通道214,进料通道214与物料箱210连通。
40.如图1和图4所示,投喂机构包括:设置在物料箱210底部的若干送料管211,若干送料管211等角度分布在物料箱210底面,送料管211底部设置旋转轴212,旋转轴212通过固定块230连接在送料管211内侧,且旋转轴212与送料管211之间具有一定空间,旋转轴212底端连接稻蟹进食构件240。
41.本发明一个较佳实施例中,在物料箱210底部设置漂浮筒250,漂浮筒250内设置有智能充气泵;通过充气筒的充气和排气实现设备的整体上升和下移,使水稻田100内的水快速进入物料箱210内,实现对稻蟹专用饲料的混合搅拌,通过在物料箱210内设置的搅拌组件,能够对物料箱210内的稻蟹专用饲料起到一定的搅拌作用,使稻蟹专用饲料在进入送料管211的时候实现各种专用稻蟹专用饲料的均匀混合,从而使稻蟹得到养分更均匀的稻蟹专用饲料,同时,在水中搅拌稻蟹专用饲料,远比颗粒状态下混合更均匀。
42.本发明一个较佳实施例中,当物料箱210内的饲料混合水随着水流进入稻蟹进食构件240时,会对螺旋叶片241起到一定的推动作用力,搅拌叶片222整体为扇形状,且搅拌叶片222具有一定扭转角度,由于搅拌叶片222具有一定扭转角度,能够驱动稻蟹进食构件240迅速旋转,使饲料混合水进一步向稻蟹进食构件240附近扩散,起到一定的吸引作用,使稻蟹主动去稻蟹进食构件240位置处进食;同时,利用稻蟹构件吸引稻蟹进食的作用,可以进一步实现诱捕的效果,更方便捕捞人员捕捞,提高养殖人员的捕捞效率。
43.本发明一个较佳实施例中,稻蟹进食构件240包括:固定在旋转轴212底端的若干螺旋叶片241,且相邻的两个螺旋叶片241组成稻蟹栖居穴242;通过固定在旋转轴212底端的若干螺旋叶片241,能够形成多个进食槽,为稻蟹提供多个进食空间,避免稻蟹之间相互乱串、争夺食物,有效改善稻蟹的进食环境。
44.如图5所示,将若干个养殖设备以线性阵列方式布置在水稻田100内,进一步实现水稻田100内的各个投喂机构均匀分布,保证水稻田100内的稻蟹能够均匀分布,进一步改善稻蟹的养殖环境。
45.本发明一个较佳实施例中,当驱动电机220逆时针旋转时,搅拌叶片222只对稻蟹专用饲料和水起到搅拌作用;当驱动电机220顺时针旋转时,搅拌叶片222对饲料混合水同时起到搅拌作用和推送作用;将搅拌组件设置为两种旋转状态,当逆时针旋转时,仅仅对稻蟹专用饲料和水起到搅拌作用,当顺时针旋转时,会对物料箱210内的混合稻蟹专用饲料起到一定的推送作用,当稻蟹专用饲料和水混合均匀之后,再将饲料混合水推送至送料管211内,能够自动化实现稻蟹专用饲料的投喂,有效节约大量人力物力。
46.本发明一个较佳实施例中,在物料箱210底部设置固定锚260,固定锚260通过铰链261连接物料箱210;通过在物料箱210底部设置的固定锚260,能够对整体设备起到一定的
位置固定作用,使多个设备能够稳定在水稻田100中。同时在各个行列的养殖设备之间留有工作通道110,便于养殖人员投料和捕捞。
47.本发明使用时,将若干个养殖设备以线性阵列方式布置在水稻田100内,人工通过进料通道214向物料箱210内添加各种稻蟹专用饲料;稻蟹专用饲料添加完毕,智能充气泵将漂浮筒250内气体排出一部分,养殖设备整体下降,直至进水孔213整体进入水面以下,物料箱210外的水进入物料箱210内,驱动电机220驱动搅拌轴221转动,当驱动电机220逆时针旋转时,搅拌叶片222只对稻蟹专用饲料和水起到搅拌作用;当驱动电机220顺时针旋转时,搅拌叶片222对饲料混合水起到推送作用,将饲料混合水推送至送料管211;饲料混合水经过送料管211进入稻蟹进食构件240内,当水流经过螺旋叶片241时,对螺旋叶片241具有一定的作用力,驱动螺旋叶片241旋转,饲料混合水扩散至附近水域,吸引稻蟹进食。
48.需要说明的是,当漂浮筒250完全充满气体时,进水孔213整体处于水面上方,且与水面距离为5
‑
15mm;当漂浮筒250气体排出一部分时,进水孔213整体进入水面以下,且与水面距离为15
‑
25mm。
49.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
50.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。