1.本技术涉及测试技术领域,尤其是涉及一种测试系统。
背景技术:
2.在面对不同的瓶体和介质时,扳动喷头所需要的力和喷头喷出的介质量是不同的,因此针对于不同的使用场景,需要对喷头的相关参数进行测试,以便更好的满足客户的使用体验。
技术实现要素:
3.本技术实施例提供一种测试系统,可以对喷头的部分参数进行自动化测试。
4.本技术实施例的上述目的是通过以下技术方案得以实现的:
5.第一方面,本技术实施例提供了一种测试系统,包括:
6.测试台架;
7.连接孔,设在测试台架上,用于安装测试件;
8.测试架,一端与测试台架滑动连接;
9.摆臂,一端铰接在测试台架上,另一端铰接在测试架上;
10.线性模组,设在测试台架上;
11.连杆,一端连接在测试架上,另一端连接在线性模组上;以及
12.控制器,用于与线性模组进行数据交互;
13.其中,连杆移动时,测试架的一端移动,另一端摆动。
14.在第一方面的一种可能的实现方式中,还包括电子秤和放置在电子秤上的液体池;
15.测试件的一端能够穿过连接孔后伸入到液体池内;
16.电子秤配置为与控制器进行数据交互。
17.在第一方面的一种可能的实现方式中,还包括位于液体池一侧的废液池。
18.在第一方面的一种可能的实现方式中,还包括位于测试件喷射路径上的挡板;
19.所述挡板固定在废液池上或者测试台架上。
20.在第一方面的一种可能的实现方式中,还包括设在测试台架上的距离传感器;
21.距离传感器配置为与控制器进行数据交互,其工作端朝向测试件的喷射路径。
22.第二方面,本技术实施例提供了一种测试系统,包括:
23.测试台架;
24.连接孔,设在测试台架上,用于安装测试件;
25.测试架,一端与测试台架滑动连接;
26.摆臂,一端铰接在测试台架上,另一端铰接在测试架上;
27.线性模组,设在测试台架上;
28.力传感器,设在线性模组上;
29.连杆,一端连接在测试架上,另一端连接在力传感器上;以及
30.控制器,用于与力传感器和线性模组进行数据交互;
31.其中,连杆移动时,测试架的一端移动,另一端摆动。
32.在第二方面的一种可能的实现方式中,还包括电子秤和放置在电子秤上的液体池;
33.测试件的一端能够穿过连接孔后伸入到液体池内;
34.电子秤配置为与控制器进行数据交互。
35.在第二方面的一种可能的实现方式中,还包括位于液体池一侧的废液池。
36.在第二方面的一种可能的实现方式中,还包括位于测试件喷射路径上的挡板;
37.所述挡板固定在废液池上或者测试台架上。
38.在第二方面的一种可能的实现方式中,还包括设在测试台架上的距离传感器;
39.距离传感器配置为与控制器进行数据交互,其工作端朝向测试件的喷射路径。
附图说明
40.图1是本技术实施例提供的一种测试系统结构示意图。
41.图2基于图1给出的另一种测试系统结构示意图,该图调整了视角。
42.图3是本技术实施例提供的一种连接孔的结构示意图。
43.图4是本技术实施例提供的另一种连接孔的结构示意图。
44.图5是本技术实施例提供的一种距离传感器的工作示意图。
45.图6是本技术实施例提供的另一种距离传感器的工作示意图。
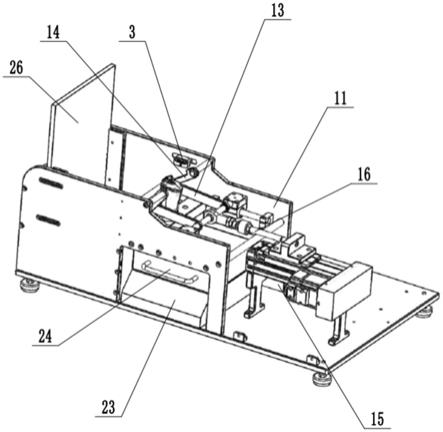
46.图7是本技术实施例提供的再一种测试系统结构示意图。
47.图8是本技术实施例提供的控制器的结构示意框图。
48.图中,11、测试台架,12、连接孔,13、测试架,14、摆臂,15、线性模组,16、连杆,17、力传感器,23、电子秤,24、液体池,25、废液池,26、挡板,3、距离传感器,6、控制器,601、cpu,602、ram,603、rom,604、系统总线。
具体实施方式
49.以下结合附图,对本技术中的技术方案作进一步详细说明。
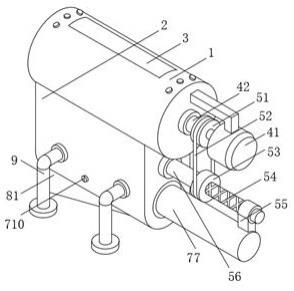
50.请参阅图1和图2,为本技术实施例公开的一种测试系统,该系统主要由测试台架11、测试架13、摆臂14、线性模组15、连杆16、力传感器17和控制器6等组成,具体的说,测试台架11上开设了一个连接孔12,使用时可以将测试件(以下均用喷头代替)直接插在连接孔12上,测试完成后将喷头拔下来。
51.测试架13的作用是向喷头上的扳机施加压力,模拟用户的使用场景。测试架13的一端与测试台架11滑动连接,另一端铰接在摆臂14上,摆臂14铰接在测试台架11上。当测试架13在测试台架11上滑动时,其与摆臂14连接的一端就会随之摆动,摆动的轨迹是一条弧线,摆动过程中,当与喷头上的扳机接触后,就会推动扳机动作。
52.应理解,一种情况下,扳机与喷头的连接方式是铰接,也就是扳机的运动过程是一个摆动的过程,当测试架13与扳机接触的一端的运动轨迹也为摆动时,就可以推动扳机摆动,并且该过程中测试架13与扳机不会发生相对滑动,这种情况与用户实际按压扳机时的
情况是一致的。
53.线性模组15安装在测试台架11上,其作用是通过连杆16驱动测试架13,连杆16的两端分别连接在测试架13和线性模组15上,线性模组15动作时,能够通过连杆16拉动测试架13与测试台架11连接的一端在测试台架11上滑动,此时,测试架13与摆臂14连接的一端会随之摆动。
54.在一些可能的实现方式中,线性模组15由工作台、安装在工作台上的导轨、与导轨滑动连接的滑台、伺服驱动部分和滚珠丝杠传动部分等组成,伺服驱动部分通过滚珠丝杠传动部分驱动滑台在导轨上往复滑动,连杆16的一端连接在滑台上。
55.控制器6与线性模组15进行数据交互,用于控制线性模组15的移动距离,以下面的使用场景为例,
56.第一种,需要测试扳机的疲劳强度,此时,线性模组15会按照设定的频次往复运动,测试架13连续不断的按压喷头上的扳机。
57.第二种,需要测试喷头的工作参数,喷头下方放置一个液体箱,线性模组15会按照设定的频次往复运动,测试架13连续不断的按压喷头上的扳机,通过液体箱内减少的量或者喷头喷出的量就能够得到相关的数据。
58.第三种,需要测试喷头是否能够正常工作,喷头下方放置一个液体箱,线性模组15驱动测试架13按压喷头上的扳机,观察喷头是否能够喷出液体就可以进行确定。
59.应理解,测试架13模拟的是喷头的使用场景,因此,与该使用场景相关的参数都可以通过本技术实施例提供的测试系统进行测试。
60.请参阅图3,连接孔12可以直接开设在测试台架11上。
61.请参阅图4,还可以在测试台架11上增加一个调整块,连接孔12分为两部分,分别位于测试台架11和调整块上,调整块使用螺栓固定在测试台架11上,放置喷头时,可以先将螺栓反向转动,放置好喷头后,再将螺栓拧紧。
62.请参阅图1和图2,作为申请提供的测试系统的一种具体实施方式,还增加了电子秤23和液体池24,液体池24位于连接孔12的下方并放置在电子秤23上,使用时,喷头的一端能够穿过连接孔12后伸入到液体池24内,吸取液体池24内的液体。
63.电子秤23与控制器6连接,其作用是向控制器6反馈液体池24与液体池24内液体的总重量。
64.增加了电子秤23和液体池24后,就可以对喷头的喷出量进行量化,例如,设定测试架13的工作次数为20次,测试架13每工作一次,电子秤23向与控制器6反馈一次液体池24与液体池24内液体的总重量。
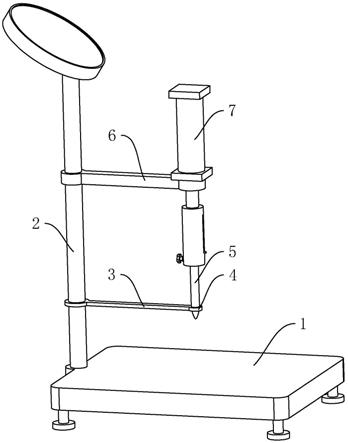
65.测试架13工作20次后,就可以得到喷头每次喷出的量和这20次的总喷出量,喷头每次喷出量可以反映喷头是否能够稳定工作,总喷出量的平均值与每次喷出量的比较可以判定喷头是否符合设计要求。
66.请参阅图1和图2,作为申请提供的测试系统的一种具体实施方式,还增加了废液池25,废液池25位于液体池24的一侧,其作用是收集喷头喷出的液体。
67.请参阅图1和图2,作为申请提供的测试系统的一种具体实施方式,还增加了挡板26,挡板26位于喷头的喷射路径上,其作用是拦截从喷头喷出的液体。应理解,喷头喷出的液体会在空中前进一段距离,增加了挡板26后,就可以将该段距离缩短,使得从喷头喷出的
液体更容易收集,避免占用过多的空间。
68.挡板26可以固定在废液池25上,也可以固定在测试台架11上。
69.请参阅图1和图2,作为申请提供的测试系统的一种具体实施方式,还在测试台架11上增加了距离传感器3,距离传感器3配置为与控制器6进行数据交互,其工作端朝向测试件的喷射路径。
70.请参阅图5和图6,距离传感器3的作用计算时间,工作过程如下,喷头没有喷出液体时,距离传感器3检测的距离值是s1,喷头喷出液体时,距离传感器3检测的距离值是s2,且s2<s1,s2持续的时间就可以认为是喷头喷出液体的时间。
71.对于液体的喷出时间,可以用来计算喷头的喷出速度,举例说明,喷头单次喷出液体的重量是已知的,喷头的流通面积是已知的,那么根据比重就可以得到喷出液体的体积,进而计算出喷头的喷出速度。当然,还可以将多次的时间累积起来,并根据喷出的液体的总量计算出喷头的平均喷出速度。
72.在一些可能的实现方式中,距离传感器3使用激光传感器。
73.请参阅图7,本技术实施例还公开了一种测试系统,该测试系统与上述测试系统的区别在于增加了力传感器17,力传感器17安装在线性模组15上,连杆16的一端连接在测试架13上,另一端连接在力传感器17上,控制器6与力传感器17和线性模组15进行数据交互。
74.结合具体的场景,
75.在检测时,线性模组15带动力传感器17移动,力传感器17通过连杆16拉动测试架13,此时,可以较为精确的得到对喷头上扳机施加的压力,此时,就可以测定在多种压力下喷头的工作情况,例如针对不同的介质,需要多大的压力才能够使喷头工作并喷出合适的量;或者在压力一定的情况下,喷头是否能够正常喷出液体;或者在多次同样移动距离的情况下,扳机处的压力是不是比较稳定。
76.增加了力传感器17后,就能够进行更多种类的测试。
77.作为申请提供的测试系统的一种具体实施方式,还增加了电子秤23和液体池24,液体池24位于连接孔12的下方并放置在电子秤23上,使用时,喷头的一端能够穿过连接孔12后伸入到液体池24内,吸取液体池24内的液体。
78.电子秤23与控制器6连接,其作用是向控制器6反馈液体池24与液体池24内液体的总重量。
79.增加了电子秤23和液体池24后,就可以对喷头的喷出量进行量化,例如,设定测试架13的工作次数为20次,测试架13每工作一次,电子秤23向与控制器6反馈一次液体池24与液体池24内液体的总重量。
80.测试架13工作20次后,就可以得到喷头每次喷出的量和这20次的总喷出量,喷头每次喷出量可以反映喷头是否能够稳定工作,总喷出量的平均值与每次喷出量的比较可以判定喷头是否符合设计要求。
81.作为申请提供的测试系统的一种具体实施方式,还增加了废液池25,废液池25位于液体池24的一侧,其作用是收集喷头喷出的液体。
82.作为申请提供的测试系统的一种具体实施方式,还增加了挡板26,挡板26位于喷头的喷射路径上,其作用是拦截从喷头喷出的液体。应理解,喷头喷出的液体会在空中前进一段距离,增加了挡板26后,就可以将该段距离缩短,使得从喷头喷出的液体更容易收集,
避免占用过多的空间。
83.挡板26可以固定在废液池25上,也可以固定在测试台架11上。
84.作为申请提供的测试系统的一种具体实施方式,还在测试台架11上增加了距离传感器3,距离传感器3配置为与控制器6进行数据交互,其工作端朝向测试件的喷射路径。
85.距离传感器3的作用计算时间,工作过程如下,喷头没有喷出液体时,距离传感器3检测的距离值是s1,喷头喷出液体时,距离传感器3检测的距离值是s2,且s2<s1,s2持续的时间就可以认为是喷头喷出液体的时间。
86.对于液体的喷出时间,可以用来计算喷头的喷出速度,举例说明,喷头单次喷出液体的重量是已知的,喷头的流通面积是已知的,那么根据比重就可以得到喷出液体的体积,进而计算出喷头的喷出速度。当然,还可以将多次的时间累积起来,并根据喷出的液体的总量计算出喷头的平均喷出速度。
87.在一些可能的实现方式中,距离传感器3使用激光传感器。
88.请参阅图8,应理解,上述内容中提到的控制器6可以是一个cpu,微处理器,asic,或一个或多个用于控制上述内容的程序执行的集成电路。控制器6主要由cpu601、ram602、rom603和系统总线604等组成,其中cpu601,ram602和rom603均连接在系统总线604上。
89.线性模组15中的伺服电机使用伺服放大器进行控制,伺服放大器使用通讯电路连接在系统总线604上,力传感器17、电子秤23和距离传感器3均通过相应的通讯电路连接在系统总线604上。
90.本具体实施方式的实施例均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。