1.本发明涉及高温气冷堆吸收球停堆系统调试技术领域,具体涉及一种吸收球停堆系统限位开关安装偏差验证方法、装置及存储介质。
背景技术:
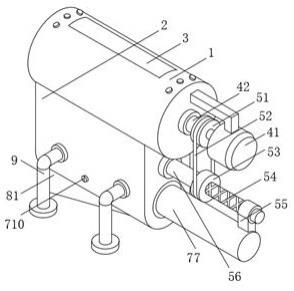
2.高温气冷堆示范工程吸收球停堆系统(jde系统)由步进电机带动落球管上下移动,当对应的上限位或者下限位开关触发时停止运动。其中,步进电机接收固定频率的脉冲信号,每接收2000个的脉冲带动落球管移动1mm。
3.在jde系统中有一对上限位开关和一对下限位开关。安装时对上下限位开关之间距离、上限位开关之间距离、下限位开关之间距离有严格要求,目前,均是在现场采用游标卡尺进行测量。
4.然而采用游标卡尺测量的方式不仅浪费人力物力,同时效率低下。而且采用游标卡尺测量的准确性也无法判断。
技术实现要素:
5.有鉴于此,本发明实施例提供了涉及一种吸收球停堆系统限位开关安装偏差验证方法、装置及存储介质,以解决现有技术中采用游标卡尺测量限位开关距离的方式效率低下的技术问题。
6.本发明提出的技术方案如下:
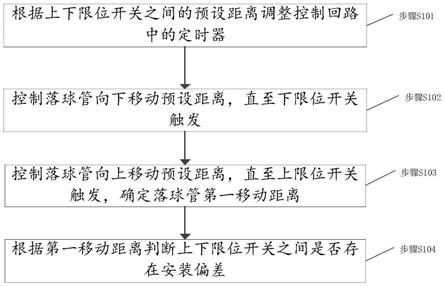
7.本发明实施例第一方面提供一种吸收球停堆系统限位开关安装偏差验证方法,包括:根据上下限位开关之间的预设距离调整控制回路中的定时器;控制落球管向下移动预设距离,直至下限位开关触发;控制落球管向上移动预设距离,直至上限位开关触发,确定落球管第一移动距离;根据所述第一移动距离判断上下限位开关之间是否存在安装偏差。
8.可选地,控制落球管向下移动预设距离,直至下限位开关触发,包括:控制落球管向下移动预设距离,直至第一个下限位开关触发;控制落球管向下移动,当第二个下限位开关触发时,确定落球管第二移动距离;根据所述第二移动距离确定两个下限位开关之间是否存在安装偏差。
9.可选地,控制落球管向上移动预设距离,直至上限位开关触发,包括:控制落球管向上移动预设距离,直至第一个上限位开关触发;控制落球管向上移动,当第二个上限位开关触发时,确定落球管第三移动距离;根据所述第三移动距离确定两个上限位开关之间是否存在安装偏差。
10.可选地,控制落球管向下移动预设距离,直至下限位开关触发,包括:控制落球管向下移动预设距离,若下限位开关未触发,再次控制落球管向下移动预设距离,直至下限位开关触发。
11.可选地,所述定时器设置80s。
12.本发明实施例第二方面提供一种吸收球停堆系统限位开关安装偏差验证系统,包
括:jde系统、dcs系统,所述jde系统包含步进电机驱动器柜、电机、落球管、两个上限位开关和两个下限位开关;所述dcs系统包括吸收球算法单元和移动距离计算单元,所述jde系统根据上下限位开关之间的预设距离调整控制回路中的定时器;所述吸收球算法单元向所述电机发送反转控制脉冲信号,所述电机根据所述反转控制脉冲信号控制落球管移动预设距离,当所述jde系统下限位开关触发时,向所述dcs系统发送下限位开关触发信号;当接收到下限位开关触发信号时,所述吸收球算法单元向所述电机发送正转控制脉冲信号,所述电机根据所述正转控制脉冲信号控制落球管移动预设距离,当所述jde系统上限位开关触发时,向所述dcs系统发送上限位开关触发信号,所述移动距离计算单元根据所述正转控制脉冲信号和所述上限位开关触发信号和下限位开关触发信号确定落球管第一移动距离;所述dcs系统根据所述第一移动距离判断上下限位开关之间是否存在安装偏差。
13.可选地,当所述jde系统第一个下限位开关触发时,向所述dcs系统发送第一下限位开关触发信号;当所述dcs系统接收到第一下限位开关触发信号且未收到第二下限位开关触发信号时,向所述电机发送反转控制脉冲信号,所述电机根据所述反转控制脉冲信号控制落球管向下移动,当所述jde系统第二个下限位开关触发时,向所述dcs系统发送第二下限位开关触发信号,所述移动距离计算单元根据所述反转控制脉冲信号和所述第一下限位开关触发信号和第二下限位开关触发信号确定落球管第二移动距离;所述dcs系统根据所述第二移动距离确定两个下限位开关之间是否存在安装偏差。
14.可选地,所述dcs系统向所述电机发送正传控制脉冲信号,所述电机根据所述正转控制脉冲信号控制落球管移动预设距离,当所述jde系统第一上限位开关触发时,向所述dcs系统发送第一上限位开关触发信号;当所述dcs系统接收到第一上限位开关触发信号且未收到第二上限位开关触发信号时,向所述电机发送正转控制脉冲信号,所述电机根据所述正转控制脉冲信号控制落球管向上移动,当所述jde系统第二个上限位开关触发时,向所述dcs系统发送第二上限位开关触发信号,所述移动距离计算单元根据所述正转控制脉冲信号和所述第一上限位开关触发信号和第二上限位开关触发信号确定落球管第三移动距离;所述dcs系统根据所述第三移动距离确定两个上限位开关之间是否存在安装偏差。
15.可选地,所述吸收球算法单元根据对所述第一下限位开关触发信号和第二下限位开关触发信号的运算生成反转到位反馈信号,根据所述反转到位反馈信号,所述吸收球算法单元闭锁向所述电机发出电机反转控制信号;所述吸收球算法单元根据对所述第一上限位开关触发信号和第二上限位开关触发信号的运算生成正转到位反馈信号,根据所述正转到位反馈信号,所述吸收球算法单元闭锁向所述电机发出电机正转控制信号。
16.本发明实施例第三方面提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使所述计算机执行如本发明实施例第一方面及第一方面任一项所述的吸收球停堆系统限位开关安装偏差验证方法。
17.本发明提供的技术方案,具有如下效果:
18.本发明实施例提供的吸收球停堆系统限位开关安装偏差验证方法及系统,根据上下限位开关之间的预设距离先对定时器进行调整,解除单次上提距离限制;然后通过控制落球管向下移动预设距离直至下限位开关触发;再控制落球管向上移动预设距离直至上限位开关触发,由此通过落球管移动距离即可实现上下限位开关之间距离的确定,最终将落球管移动距离和上下限位开关之间预设距离进行比较,即可确定上下限位开关是否存在安
装偏差。由此,该安装偏差验证系统通过落球管上下移动的方式验证限位开关是否存在安装偏差,相比采用游标卡尺测量的方式,提高了工作效率,同时,当采用游标卡尺测量时,通过该验证方法还可以辅验证助游标卡尺测量结果,提高测量的准确性。
附图说明
19.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
20.图1是根据本发明实施例的吸收球停堆系统限位开关安装偏差验证方法的流程图;
21.图2是根据本发明实施例的jde系统驱动器柜和dcs系统的结构框图;
22.图3是根据本发明实施例的dcs系统人机交互界面示意图;
23.图4是根据本发明另一实施例的吸收球停堆系统限位开关安装偏差验证方法的流程图;
24.图5是根据本发明另一实施例的吸收球停堆系统限位开关安装偏差验证方法的流程图;
25.图6是根据本发明实施例的吸收球算法单元的逻辑示意图;
26.图7是根据本发明实施例的正转允许条件设置逻辑示意图;
27.图8是根据本发明实施例的正转允许条件设置逻辑示意图;
28.图9是根据本发明实施例的正转行程到位反馈和反转行程到位反馈设置逻辑示意图;
29.图10是根据本发明实施例的正转到位反馈设置逻辑示意图;
30.图11是根据本发明实施例的反转到位反馈设置逻辑示意图;
31.图12是根据本发明实施例的计数清零和落球管移动距离显示设置逻辑示意图;
32.图13是根据本发明实施例提供的计算机可读存储介质的结构示意图。
具体实施方式
33.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
34.正如在背景技术中所述,对于jde系统中安装的限位开关之间的距离有严格要求。现有技术中通常是采用游标卡尺进行测量。而在正常工作中,通常是采用dcs系统控制落球管运动。但是目前的dcs系统只能实现落球管单向下插或者是上提、下插落球管。其中,在实现单向下插落球管时,jde驱动器柜处于运行模式、允许关落球管状态,jde驱动器柜已经从硬控制回路已经闭锁接收dcs上提落球管的指令。在实现上提或下插落球管时,jde驱动器柜内正转控制回路中设置有4s的定时器,落球管单次上提4s后,正转控制回路断开。而dcs每次发出的脉冲数是固定的2000个脉冲,当两个下限位开关均脱离触发后无法继续上提落
球管,当有一个或两个下限位开关触发时无法继续下插落球管。由此,采用现有的dcs系统无法实现jde系统中限位开关安装偏差的验证。
35.基于此,本发明实施例提供一种吸收球停堆系统限位开关安装偏差验证方法,如图1所示,该方法包括如下步骤:
36.步骤s101:根据上下限位开关之间的预设距离调整控制回路中的定时器。在一实施方式中,如图2所示,jde系统驱动器柜分为运行、调试、定期试验三种工作模式。在运行模式下,jde系统驱动器柜从自身硬控制回路闭锁接收dcs的正转控制信号。在调试模式下,jde系统驱动器柜从自身硬控制回路同时闭锁接收dcs的正转/反转控制信号。在定期试验模式下,jde驱动机构机柜可接收dcs系统上提和下插的组合控制信号,但正转控制回路中设置有4s的定时器,落球管单次上提4s后,控制回路断开。无法进行限位开关之间距离的验证。因此可以根据上下限位开关之间距离调整定期试验模式正转控制回路定时器,当上下限位开关之间距离较大时,则定时器值可以较大。在该实施例中,定时器可以由4s修改为80s,从而解除单次上提距离限制。
37.步骤s102:控制落球管向下移动预设距离,直至下限位开关触发。
38.在一实施方式中,可以先控制落球管向下移动确定下限位开关的位置。其中,控制落球管移动时为了便于控制可以每次控制落球管移动预设距离。具体地,如图3所示,可以在dcs中输入预设距离,点击向下按钮,落球管向下移动。当移动距离达到预设距离时,若此时还未触发下限位开关,可以控制落球管继续向下移动预设距离,直至触发下限位开关。当下限位开关触发时,dcs画面对应下限位指示灯点亮,同时dcs停止发出组合控制信号,落球管停止运动,并在dcs画面实现本次移动距离回读的显示。
39.步骤s103:控制落球管向上移动预设距离,直至上限位开关触发,确定落球管第一移动距离。
40.在一实施方式中,dcs系统设置复位功能,在下限位开关触发后,点击dcs上计数复位按钮,将移动距离回读显示进行清零。以dcs系统页面输入预设距离,点击向上按钮,控制落球管向上移动。当移动距离达到预设距离时,若此时还未触发上限位开关,可以控制落球管继续向上移动预设距离,直至触发上限位开关。当上限位开关触发时,dcs画面对应上限位指示灯点亮,同时dcs停止发出组合控制信号,落球管停止运动,并在dcs画面实现移动距离回读的显示,从而确定第一移动距离。
41.步骤s104:根据第一移动距离判断上下限位开关之间是否存在安装偏差。具体地,第一移动距离为上下限位开关之间的实际距离,可以直接将第一移动距离和上下限位开关之间的预设距离进行比较,即可判断上下限位开关之间是否存在安装偏差。
42.本发明实施例提供的吸收球停堆系统限位开关安装偏差验证方法,根据上下限位开关之间的预设距离先对定时器进行调整,解除单次上提距离限制;然后通过控制落球管移动预设距离直至下限位开关触发;再控制落球管向上移动预设距离直至上限位开关触发,由此通过落球管移动距离回读即可实现上下限位开关之间距离的确定,最终将落球管移动距离和上下限位开关之间预设距离进行比较,即可确定上下限位开关是否存在安装偏差。由此,该安装偏差验证方法通过落球管上下移动的方式验证限位开关是否存在安装偏差,相比采用游标卡尺测量的方式,提高了工作效率,同时,当采用游标卡尺测量时,通过该验证方法还可以辅验证助游标卡尺测量结果,提高测量的准确性。
43.由于jde系统中上下均设置一对限位开关,因此除了验证上下限位开关之间的偏差,还需要验证两个上限位开关以及两个下限位开关之间的偏差。作为本发明实施例的一种可选的实施方式,如图4所示,控制落球管向下移动预设距离,直至下限位开关触发,包括如下步骤:
44.步骤s201:控制落球管向下移动预设距离,直至第一个下限位开关触发;具体地,当落球管向下移动直至第一个下限位开关触发时,dcs画面对应指示灯点亮。
45.步骤s202:控制落球管向下移动,当第二个下限位开关触发时,确定落球管第二移动距离;具体地,在第一个下限位开关触发后,可以点击dcs上计数复位按钮,对落球管移动距离回读显示清零。然后继续输入预设距离,点击向下移动按钮,控制落球管向下移动,若移动预设距离后,第二个下限位开关未触发,继续输入预设距离控制落球管继续移动,直至第二个下限位开关触发。当第二个下限位开关触发时,dcs停发组合控制指令,落球管停止运动,dcs画面对应指示灯点亮,记录落球管移动距离回读值,即第二移动距离。
46.步骤s203:根据第二移动距离确定两个下限位开关之间是否存在安装偏差。具体地,由于第二移动距离为落球管触发第一个下限位开关后的移动距离,即第二移动距离为两个下限位开关之间的实际距离,将其和两个下限位开关的预设距离进行比较,即可判断两个下限位开关之间是否存在安装偏差。
47.作为本发明实施例的一种可选的实施方式,如图5所示,控制落球管向上移动预设距离,直至上限位开关触发,包括:
48.步骤s301:控制落球管向上移动预设距离,直至第一个上限位开关触发;具体地,当落球管向上移动直至第一个上限位开关触发时,dcs画面对应指示灯点亮。。
49.步骤s302:控制落球管向上移动,当第二个上限位开关触发时,确定落球管第三移动距离;具体地,当第一个上限位开关触发时,可以点击dcs计数复位按钮,对落球管移动距离回读显示清零。然后继续输入预设距离,点击向上移动按钮,控制落球管向上移动,若移动预设距离后,第二个上限位开关未触发,继续输入预设距离控制落球管继续移动,直至第二个上限位开关触发。当第二个上限位开关触发时,dcs停发组合控制指令,落球管停止运动,dcs画面对应指示灯点亮,记录落球管移动距离回读值,即第三移动距离。
50.步骤s303:根据第三移动距离确定两个上限位开关之间是否存在安装偏差。具体地,由于第三移动距离为落球管触发第一个上限位开关后的移动距离,即第三移动距离为两个上限位开关之间的实际距离,将其和两个上限位开关的预设距离进行比较,即可判断两个上限位开关之间是否存在安装偏差。此外,当需要提高判断的准确性时,可以按照上述方式进行多次测量。
51.本发明实施例还提供一种吸收球停堆系统限位开关安装偏差验证系统,该系统包括:jde系统、dcs系统,jde系统包含步进电机驱动器柜、电机、落球管、两个上限位开关和两个下限位开关等;dcs系统包括吸收球算法单元和移动距离计算单元,jde系统根据上下限位开关之间的距离调整控制回路中的定时器;吸收球算法单元向电机发送反转控制脉冲信号,电机根据反转控制脉冲信号控制落球管移动预设距离,当jde系统下限位开关触发时,向dcs系统发送下限位开关触发信号;吸收球算法单元向电机发送正转控制脉冲信号,电机根据正转控制脉冲信号控制落球管移动预设距离,当jde系统上限位开关触发时,向dcs系统发送上限位开关触发信号,移动距离计算单元根据正转控制脉冲信号和上限位开关触发
信号和下限位开关触发信号确定落球管第一移动距离;dcs系统根据第一移动距离判断上下限位开关之间是否存在安装偏差。其中,电机可以是步进电机。
52.本发明实施例提供的吸收球停堆系统限位开关安装偏差验证系统,根据上下限位开关之间的预设距离先对定时器进行调整,解除单次上提距离限制;然后通过控制落球管移动预设距离直至下限位开关触发;再控制落球管向上移动预设距离直至上限位开关触发,由此通过落球管移动距离即可实现上下限位开关之间距离的确定,最终将落球管移动距离和上下限位开关之间预设距离进行比较,即可确定上下限位开关是否存在安装偏差。由此,该安装偏差验证系统通过落球管上下移动的方式验证限位开关是否存在安装偏差,相比采用游标卡尺测量的方式,提高了工作效率,同时,当采用游标卡尺测量时,通过该验证方法还可以辅验证助游标卡尺测量结果,提高测量的准确性。
53.作为本发明实施例的一种可选的实施方式,当jde系统第一个下限位开关触发时,向dcs系统发送第一下限位开关触发信号;当dcs系统接收到第一下限位开关触发信号且未收到第二下限位开关触发信号时,向电机发送反转控制脉冲信号,电机根据反转控制脉冲信号控制落球管向下移动,当jde系统第二个下限位开关触发时,向dcs系统发送第二下限位开关触发信号,移动距离计算单元根据反转控制脉冲信号和第一下限位开关触发信号和第二下限位开关触发信号确定落球管第二移动距离;dcs系统根据第二移动距离确定两个下限位开关之间是否存在安装偏差。
54.作为本发明实施例的一种可选的实施方式,dcs系统向电机发送正传控制脉冲信号,电机根据正转控制脉冲信号控制落球管移动预设距离,当jde系统第一上限位开关触发时,向dcs系统发送第一上限位开关触发信号。当dcs系统接收到第一上限位开关触发信号且未收到第二上限位开关触发信号时,向电机发送正转控制脉冲信号,电机根据正转控制脉冲信号控制落球管向下移动,当jde系统第二个上限位开关触发时,向dcs系统发送第二上限位开关触发信号,移动距离计算单元根据正转控制脉冲信号和所述第一上限位开关触发信号和第二上限位开关触发信号确定落球管第三移动距离;dcs系统根据所述第三移动距离确定两个上限位开关之间是否存在安装偏差。
55.作为本发明实施例的一种可选的实施方式,吸收球算法单元根据对第一下限位开关触发信号和第二下限位开关触发信号的运算生成反转到位反馈信号,根据反转到位反馈信号,所述吸收球算法单元闭锁向所述电机发出电机反转控制信号;吸收球算法单元根据对第一上限位开关触发信号和第二上限位开关触发信号的运算生成正转到位反馈信号,根据正转到位反馈信号,所述吸收球算法单元闭锁向所述电机发出电机正转控制信号。具体地,通过生成的正转到位反馈和反转到位反馈信号,当收到反馈信号时,指令输出自动停发,以保证不会出现落球管运动过冲造成设备损坏的情况。
56.作为本发明实施例的一种可选的实施方式,为了使得吸收球算法单元实现上述功能,可以将其按照如图6所示的方式进行设置。其中,引脚mrr为手动正转指令;引脚mrr为手动反转指令;引脚res为手动报警复位;引脚spin为给定脉冲数;引脚pepr为正转许可条件;引脚perr为反转许可条件;引脚prp正转到位反馈;引脚rrp为反转到位反馈;引脚tprp为正转时间;引脚trrp为反转时间;引脚en为使能信号即转动信号;引脚rd为转向信号(正转/反转);引脚pvnum为输出的脉冲数。
57.具体地,jlset为输入的落球管移动预设距离(单位mm),假设步进电机接收2000个
脉冲,控制落球管移动1mm。则将jlset与2000作乘法运算即得到jlset落球管移动预设距离(落球管移动距离设定值)对应的脉冲数,赋值给xsqsf01的给定脉冲数spin引脚。
58.步进电机接收固定频率为1000hz的脉冲信号,即dcs每秒发出1000个脉冲,对应落球管每1秒移动0.5mm,即落球管每移动1mm需2秒。则将jlset与2做乘法运算,得出落球管移动所需时间,赋值给xsqsf01的正转超时时间tprp引脚和xsqsf01的反转超时时间trrp引脚。正转或者反转组合控制指令发出后,在落球管移动所需时间范围内(即tprp和trrp),dm001正转到位反馈信号和dm002反转到位信号未赋值1或者一个50ms宽度的脉冲信号给xsqsf01的prp引脚或者xsqsf01的rrp,则生成正转超时或者反转超时故障,闭锁下一次步进电机转动组合指令发出。通过故障复位指令re01,控制对应sqsf01的引脚res,可复位正转超时或者反转超时故障。
59.当xsqsf01的pepr引脚正转允许条件dm011为0或者xsqsf01的prp引脚正转到位反馈信号dm001存在(即dm001为1时),闭锁正转组合控制指令发出。当xsqsf01的pepr引脚正转允许条件dm011为1且xsqsf01的prp引脚正转到位反馈信号dm001不存在(即dm001为0时)时,设置jlset落球管移动预设距离,发出zl01正转指令(正转控制脉冲信号),即dcs向步进电机驱动器发出步进电机正转组合控制信号enou转动指令为1,rdout转向指令为0,pvnum脉冲输出为spin引脚对应数值,步进电机正转带动落球管向上移动。当正转到位反馈信号dm001由0变为1或者由0变为一个50ms的脉冲信号时,停发步进电机正转组合控制信号,此时enou转动指令为0,rdout转向指令为0,pvnum脉冲输出为spin引脚对应数值。
60.当xsqsf01的pepr引脚反转允许条件dm012为0或xsqsf01的rrp引脚正转到位反馈信号dm002存在(即dm002为1时)时,闭锁反转组合控制指令发出。当xsqsf01的pepr引脚反转允许条件dm012为1且xsqsf01的rrp引脚正转到位反馈信号dm002不存在(即dm002为0时)时,设置jlset落球管移动预设距离,发出zl02反转指令(脉冲信号),即dcs向步进电机驱动器发出步进电机反转组合控制信号enou转动指令为1,rdout转向指令为1,pvnum脉冲输出为spin引脚对应数值,步进电机反转带动落球管向下移动。当反转到位反馈信号dm002由0变为1或者由0变为一个50ms的脉冲信号时,停发步进电机正转组合控制信号,此时enou转动指令为0,rdout转向指令为0,pvnum脉冲输出为spin引脚对应数值。
61.作为本发明实施例的一种可选的实施方式,pepr正转允许条件可以按照如图7所示的方式确定:其中,sxwa1信号为落球管上限位a(第一上限位开关),sxwb1信号为落球管上限位b(第二上限位开关),sxwa1和sxwb1均为开关量,dm011为开关量中间变量。当落球管上限位a触发时,sxwa1为1;当落球管上限位b触发时,sxwb1为1。sxwa1和sxwb1二者作与运算输出1,取非后输出0,赋值给dm011。dm011赋值给xsqsf01算法块的pepr引脚,perp为0。当pepr为0时,代表步进电机正转允许条件不存在,即闭锁步进电机正转组合指令发出。由此,通过该设置,当落球管两个上限位开关均触发时不允许步进电机正转组合指令发出;当落球管有一个或两个上限位开关未触发时,均允许步进电机正转组合指令发出。
62.作为本发明实施例的一种可选的实施方式,perr反转允许条件可以按照如图8所示的方式确定:其中,xxwa1信号为落球管下限位a(第一下限位开关),xxwb1信号为落球管下限位b(第二下限位开关),xxwa1和xxwb1均为开关量,dm012为开关量中间变量。当落球管下限位a触发时,xxwa1为0;当落球管下限位b触发时,xxwb1为0。xxwa1和xxwb1各自取非后均为1,作与运算输出1,取非后输出0,赋值给dm012。dm012赋值给xsqsf01算法块的perr引
脚,perr为0。当perr为0时,代表步进电机反转允许条件不存在,即闭锁步进电机反转组合指令发出。由此,当落球管两个下限位开关均触发时不允许步进电机反转组合指令发出;当落球管有一个或两个下限位开关未触发时,均允许步进电机反转组合指令发出。
63.作为本发明实施例的一种可选的实施方式,当落球管移动预设距离后停止,直至再次收到移动预设距离信号。由此,如图9所示,可以设置正转行程到位反馈(dm11)或反转行程到位反馈(dm12)表明落球管已经移动预设距离。其中,上升沿触发算法r_trig表示当clk引脚由0变为1时,q引脚输出一个宽度为一个控制器运算周期(50ms)的脉冲;选择算法sel表示左侧第1个引脚为1时,右侧输出选择左侧第3个引脚的值,左侧第1个引脚为0时,右侧输出选择左侧第2个引脚的值;rs触发器表示当set置位端为1,reset1复位端为0时,q1输出为1;当set置位端为0,reset1复位端为0时,q1输出维持上一时刻输出值;当reset1复位端为1时,无论set置位端为0或者为1,q1输出均为0;mul为乘法逻辑,add为加法逻辑,sub为减法逻辑,div为除法逻辑,abs为取绝对值逻辑,or为或门逻辑,and为与门逻辑,not为非门逻辑,le为小于等于算法逻辑。
64.具体地,步进电机驱动器接收2000个脉冲,控制落球管移动1mm。jlset与2000作乘法运算即得到jlset落球管移动预设距离对应的脉冲数目。enout为0时,选择算法块sel输出mchd步进电机脉冲回读数实时值。enout步进电机转动指令为1时,选择算法块sel输出锁定enout步进电机转动指令由0变1时刻(即步进电机转动开始前)的mchd步进电机脉冲回读数值。
65.mchd步进电机脉冲回读数实时值与sel输出锁定的步进电机转动开始前的mchd步进电机脉冲回读数值作减法后取绝对值,得出自步进电机转动开始后dcs发出的脉冲数值。jlset落球管移动预设距离对应的脉冲数减去自步进电机转动开始后dcs发出的脉冲数值,当两者差值小于等于1时,le算法块输出为1,代表dcs发出的脉冲数已达到jlset落球管移动距离设定值要求。
66.rdout转向指令为1时代表反转;enout转动信号为1代表转动信号存在。当rdout转向指令为反转、enout转动信号存在时,rs01的set置位端为1,reset1复位端为0,rs01的q1输出为1。即rs01的q1输出为1时代表步进电机正在发出反转组合指令。le算法块输出1,rs01的q1输出为1。二者做与运算后生成1,r_trig算法检测到由0变1的上升沿后输出一个长度为50ms脉冲后,赋值给dm12反转行程到位反馈。即当dcs发出的脉冲数达到jlset落球管移动距离设定值要求,且步进电机发出为反转指令时,生成dm12反转行程到位反馈信号,此时dm12为一个长度为50ms的脉冲信号。
67.rdout转向指令为0时代表正转;enout转动信号为1代表转动信号存在。当rdout转向指令为正转、enout转动信号存在时,rs02的set置位端为1,reset1复位端为0,rs01的q1输出为1。即rs02的q1输出为1时代表步进电机正在发出正转组合指令。le算法块输出1,,rs02的q1输出为1。二者做与运算后生成1,r_trig算法检测到由0变1的上升沿后输出一个长度为50ms脉冲后,赋值给dm11正转行程到位反馈。即当dcs发出的脉冲数达到jlset落球管移动距离设定值要求,且步进电机发出为正转指令时,生成dm11反转行程到位反馈信号,此时dm11为一个长度为50ms的脉冲信号。
68.由此,通过判断落球管移动过程中mchd步进电机脉冲回读数实时值和移动前mchd步进电机脉冲回读数的差值是否已达到设定的落球管移动距离对应脉冲数,生成正转/反
转行程到位反馈信号(dm12和dm11)。
69.作为本发明实施例的一种可选的实施方式,通过上述确定的正转行程到位反馈信号可以确定正转到位反馈prp。由此,可以采用如图10所示的方式确定dm001信号。具体地,sxwa1取非后和sxwb1作与运算,当序号18的and算法输出为1时,代表落球管上限位a未触发、落球管上限位b触发。sxwb1取非后sxwa1作与运算,当序号20的and算法输出为1时,代表落球管上限位a触发、落球管上限位b未触发。序号18的and算法输出与序号20的and算法输出做或运算。当序号21的or算法输出为1时代表落球管上限位a、b只有一个触发。此时r_trig01算法检测到序号21的or算法输出由0变1的上升沿后输出一个长度为50ms的脉冲信号。当落球管上限位a、b均触发时,sxwa1与sxwb1做与运算后输出为1,然后与dm11正转行程到位信号、r_trig01算法块输出做或运算,赋值给dm001正转到位反馈信号。
70.由此,有一个或两个上限位开关触发,或者正转行程到位反馈信号生成,即表示正转到位。当两个上限位开关均触发时,dm001为1;当只有一个上限位开关触发时,或者正转行程到位信号dm11生成时,dm001为一个长度为50ms的脉冲信号。
71.通过上述设置,dm001赋值给xsqsf算法块的引脚prp正转到位反馈,当正转到位反馈存在时,xsqsf算法块停发正转组合控制指令。单次落球管移动过程中mchd步进电机脉冲回读数实时值和移动前mchd步进电机脉冲回读数的差值达到落球管移动距离设定值对应脉冲数或者只有一个上限位触发时,dm001为一个长度为50ms的脉冲信号。因dm001短暂存在50ms后消失,所以当单次移动距离达到设定值时或者只有一个上限位触发时,xsqsf算法块仅停发本次落球管移动的正转组合控制指令,不会影响下次正转控制组合指令的发出。基于此,实现dcs控制落球管多次上提运动,直至两个上限位均触发。
72.作为本发明实施例的一种可选的实施方式,通过上述确定的反转行程到位反馈信号可以确定反转到位反馈rrp。由此,可以采用如图11所示的方式确定dm002信号。具体地,xxwa1取非后与xxwb1做与运算,序号32的and算法输出为1时代表落球管下限位a触发,落球管下限位b未触发。xxwb1取非后与xxwa1做与运算,序号34的and算法输出为1时代表落球管下限位b触发,落球管下限位a未触发。序号为32的and算法输出与序号为34的and算法输出做或运算。当序号35的or算法输出为1时代表落球管下限位a、b只有一个触发。此时r_trig02算法检测到序号35的or算法输出由0变1的上升沿后输出一个长度为50ms的脉冲信号。当落球管下限位a、b均触发时,xxwa1取非与xxwb1取非做与运算后输出为1,然后与dm12反转行程到位信号、r_trig02算法块输出做或运算,赋值给dm002正转到位反馈信号。
73.由此,有一个或两个下限位开关触发,或者反转行程到位反馈信号生成,即表示反转到位。当两个下限位开关均触发时,dm002为1;当只有一个下限位开关触发时,或者单次落球管移动过程中mchd步进电机脉冲回读数实时值和移动前mchd步进电机脉冲回读数的差值已达到设定的落球管移动距离对应脉冲数(单次反转行程到位信号dm12为1)时,dm002为一个长度为50ms的脉冲信号。
74.通过上述设置,dm001赋值给xsqsf算法块的引脚rrp反转到位反馈,当反转到位反馈存在时,xsqsf算法块停发正转组合控制指令。单次落球管移动过程中mchd步进电机脉冲回读数实时值和移动前mchd步进电机脉冲回读数的差值达到落球管移动距离设定值对应脉冲数或者只有一个下限位触发时,dm002为一个长度为50ms的脉冲信号。因dm002短暂存在50ms后消失,所以在单次移动距离达到设置值或者只有一个下限位开关触发时,xsqsf算
法块仅停发本次落球管移动的正转组合控制指令,不会影响下次落球管反转控制组合指令的发出。基于,实现dcs控制落球管多次下插运动,直至两个下限位均触发。
75.作为本发明实施例的一种可选的实施方式,可以通过如图12所示的方式实现dcs系统的计数清零和落球管移动距离显示。具体地,jsfw为计数复位清零指令,mczs为步进电机脉冲置数信号;mchd为脉冲回读数信号,mczskz为步进电机置数控制信号。ydjlhd为落球管移动距离回读。置数算法move表示en使能端为1时,右侧第2个引脚输出为左侧第2个引脚的值;en使能端为0时,右侧第2个引脚输出维持原值。
76.当jsfw计数复位清零指令为1时,move置数算法的en引脚为1,将1000000赋值给mczs步进电机脉冲置数信号;同时mczskz步进电机置数控制信号为1。在mczs和mczskz的共同作用下,脉冲回读数mchd初始值被置为1000000。
77.落球管移动1mm,对应步进电机接收2000个脉冲。落球管上下移动过程中,脉冲回读数mchd在原脉冲数基础上相应增减。1000000与mchd脉冲回读数做减法运算后除以2000,得到ydjlhd落球管移动距离回读。例如:当mchd被jsfw计数复位清零指令置为初始值1000000时,ydjlhd落球管移动距离回读为0。
78.需要说明的是,上述提到的上升沿触发算法r_trig、选择算法sel、置数算法move、rs触发器、乘法逻辑mul、加法逻辑add、减法逻辑sub、除法逻辑div、取绝对值逻辑abs、或门逻辑or、与门逻辑and、非门逻辑not、小于等于算法逻辑le可以采用相应的电路芯片实现,也可以通过编写相应的代码实现。
79.本发明实施例还提供一种存储介质,如图13所示,其上存储有计算机程序601,该指令被处理器执行时实现上述实施例中吸收球停堆系统限位开关安装偏差验证方法的步骤。该存储介质上还存储有音视频流数据,特征帧数据、交互请求信令、加密数据以及预设数据大小等。其中,存储介质可为磁碟、光盘、只读存储记忆体(read-only memory,rom)、随机存储记忆体(random access memory,ram)、快闪存储器(flash memory)、硬盘(hard disk drive,缩写:hdd)或固态硬盘(solid-state drive,ssd)等;所述存储介质还可以包括上述种类的存储器的组合。
80.本领域技术人员可以理解,实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的程序可存储于一计算机可读取存储介质中,该程序在执行时,可包括如上述各方法的实施例的流程。其中,所述存储介质可为磁碟、光盘、只读存储记忆体(read-only memory,rom)、随机存储记忆体(random access memory,ram)、快闪存储器(flash memory)、硬盘(hard disk drive,缩写:hdd)或固态硬盘(solid-state drive,ssd)等;所述存储介质还可以包括上述种类的存储器的组合。
81.虽然结合附图描述了本发明的实施例,但是本领域技术人员可以在不脱离本发明的精神和范围的情况下做出各种修改和变型,这样的修改和变型均落入由所附权利要求所限定的范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。