1.本发明涉及一种管理系统,特别是涉及一种基于智能网联的新能源汽车管理系统。
背景技术:
2.随着电动车及无人驾驶车辆技术的深入发展,各个汽车厂商纷纷向汽车中引入无人驾驶技术,但现有的无人驾驶技术主要停留在l2级,具仅能获取单车的环境信息,无法实现有效的信息交互管理过程,导致信息利用率低下。
技术实现要素:
3.本发明提供了基于智能网联的新能源汽车管理系统,以提高对汽车所采集信息的利用率。
4.本发明提供了基于智能网联的新能源汽车管理系统,包括云端控制平台、无人驾驶电动汽车控制平台;
5.所述无人驾驶电动汽车控制平台包括:
6.感应模块,所述感应模块用于获取车辆的环境信息;
7.信息采集模块,所述信息采集模块用于采集车辆的运行信息;
8.信息处理模块,所述信息处理模块用于提取车辆的运行信息、车辆的环境信息,确定车辆运行状态;
9.互联模块,所述互联模块用于将车辆运行状态发送给云端控制平台;
10.所述云端控制平台用于获取车辆运行状态,根据车辆所在位置提取地图信息,并将车辆的环境信息与地图信息拟合,构建无人驾驶电动汽车平台所在车辆的整体环境信息图。
11.进一步地,所述云端控制平台还包括信息反馈过程,所述信息反馈过程用于将整体环境信息图发送给该无人驾驶电动汽车平台所在车辆的后方车辆。
12.进一步地,所述云端控制平台还包括区域的整体环境信息图拟合、发送过程:
13.s101获取同一区域内多个无人驾驶电动汽车平台所在车辆的运行信息,并与该区域地图进行信息拟合,构建该区域的整体环境信息图;
14.s102确定在该区域无人驾驶电动汽车平台所在第一车辆的位置,提取该区域中位于第一车辆前进方向的环境信息;
15.s103将提取后的环境信息打包,并发送给第一车辆的无人驾驶电动汽车平台。
16.进一步地,所述感应模块包括雷达单元、摄像单元,所述雷达单元用于获取车辆周围的环境信息,所述摄像单元用于采集车辆周围的环境图像信息。
17.更进一步地,所述感应模块还包括振动感应单元,所述振动感应单元用于获取车身的振动情况。
18.进一步地,在车辆运行过程中,所述信息采集模块采集车辆的运行信息,所述运行
信息包括方向盘转动角度、油门踏板信号、刹车踏板信号、汽车转向灯信号变化。
19.进一步地,所述信息处理模块还包括无人驾驶安全分析单元,所述无人驾驶安全分析单元用于采集驾驶人的信息,并分析驾驶人是否处于睡眠状态;若驾驶人处于睡眠状态,则由互联模块向云端控制平台发送警示信息。
20.更进一步地,所述无人驾驶安全分析单元可选为车内摄像头或方向盘转向感应器。
21.进一步地,所述云端控制平台还包括障碍物拟合过程:
22.s201提取多个无人驾驶电动汽车平台所在车辆的环境信息中的障碍物信息,根据地图信息,确定障碍物所在位置;
23.s202将各个无人驾驶电动汽车平台所在车辆的障碍物信息环境信息图中进行信息叠合。
24.更进一步地,s103中打包后的环境信息设有打包时间戳,所述无人驾驶电动汽车控制平台还包括短程信息发送过程:
25.s301若两个无人驾驶电动汽车平台所在车辆靠近,则各个无人驾驶电动汽车平台的信息处理模块通过互联模块进行互联;
26.s302信息处理模块向另一信息处理模块发送请求,获取该另一信息处理模块的打包时间戳;
27.s303对两个无人驾驶电动汽车平台的打包时间戳进行比对,若不同,则打包时间戳较新的信息处理模块将该环境信息发送给另一无人驾驶电动汽车平台的信息处理模块。
28.本发明相对于现有技术,以感应模块、信息采集模块、信息处理模块、互联模块对新能源汽车的行驶状况进行有效分析,并通过云端控制平台构建无人驾驶电动汽车平台所在车辆的整体环境信息图,方便对道路状况的分析,从而实现对新能源汽车的有效管理,提高汽车信息利用率。
附图说明
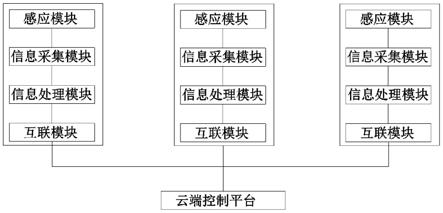
29.图1为本发明实施例新能源汽车管理系统原理图。
具体实施方式
30.为了使本技术领域的人员更好地理解本发明方案,下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。
31.本发明实施例公开了基于智能网联的新能源汽车管理系统,如图1所示,包括云端控制平台、无人驾驶电动汽车控制平台;
32.所述无人驾驶电动汽车控制平台包括:
33.感应模块,所述感应模块用于获取车辆的环境信息;
34.其中,感应模块可采用激光、雷达、摄像等方式对车辆周围的环境信息进行扫描检测;
35.信息采集模块,所述信息采集模块用于采集车辆的运行信息;
36.其中,信息采集模块用于获取车辆的运行信息,包括车辆的油门踏板信息、刹车踏
板信息、胎压信息、电量信息等;
37.信息处理模块,所述信息处理模块用于提取车辆的运行信息、车辆的环境信息,确定车辆运行状态;
38.其中,信息处理模块对感应模块、信息采集模块所采集到的信息进行收集分析,确定车辆的运行状态;
39.互联模块,所述互联模块用于将车辆运行状态发送给云端控制平台;
40.所述云端控制平台用于获取车辆运行状态,根据车辆所在位置提取地图信息,并将车辆的环境信息与地图信息拟合,构建无人驾驶电动汽车平台所在车辆的整体环境信息图。
41.其中,云端控制平台根据gps等定位系统获取车辆的实际位置,获取车辆所在区域地图,在基础环境信息图上建立坐标,以本车辆为坐标零点,将车辆的环境信息与地图信息进行拟合。
42.本发明实施例以感应模块、信息采集模块、信息处理模块、互联模块对新能源汽车的行驶状况进行有效分析,并通过云端控制平台构建无人驾驶电动汽车平台所在车辆的整体环境信息图,方便对道路状况的分析,从而实现对新能源汽车的有效管理,提高汽车信息利用率。
43.可选的,所述云端控制平台还包括信息反馈过程,所述信息反馈过程用于将整体环境信息图发送给该无人驾驶电动汽车平台所在车辆的后方车辆。
44.本发明实施例通过向后方车辆发送整体环境信息图,使后方车辆可获取前方路况等信息,若车辆在无人驾驶状态时,可根据前方的路况信息改变车辆预定的行驶情况。
45.可选的,所述云端控制平台还包括区域的整体环境信息图拟合、发送过程:
46.s101获取同一区域内多个无人驾驶电动汽车平台所在车辆的运行信息,并与该区域地图进行信息拟合,构建该区域的整体环境信息图;
47.其中,云端控制平台在区域地图上建立坐标,设定某一汽车为坐标零点,确定其余车辆在坐标上的相对位置;以各个车辆在坐标上的相对位置,对各个车辆所检测到的环境信息进行较准拟合,获得校准后的整体环境信息图;
48.s102确定在该区域无人驾驶电动汽车平台所在第一车辆的位置,提取该区域中位于第一车辆前进方向的环境信息;
49.其中,若该区域有多个载有无人驾驶电动汽车平台的车辆,以某一车辆作为第一车辆;通过gps定位确定该车辆的位置,并提取该区域中位于第一车辆前进方向的环境信息,使第一车辆可获得前方区域的具体环境情况。
50.s103将提取后的环境信息打包,并发送给第一车辆的无人驾驶电动汽车平台。
51.本发明实施例的云端控制平台可向车辆智能发送前方路况信息,若车辆在无人驾驶状态时,可根据前方的路况信息改变车辆预定的行驶情况,提高对信息的利用率。
52.可选的,所述感应模块包括雷达单元、摄像单元,所述雷达单元用于获取车辆周围的环境信息,所述摄像单元用于采集车辆周围的环境图像信息。
53.特别的,所述感应模块还包括振动感应单元,所述振动感应单元用于获取车身的振动情况。
54.其中,振动感应单元具有多个,并安装在车底内,用于获取车身各部的振动情况。
55.本发明实施例通过采用振动感应单元,可对车身振动情况进行有效检测,若车身振动明显,则说明道路不平,从而实现对路面平整情况的有效感应。
56.可选的,在车辆运行过程中,所述信息采集模块采集车辆的运行信息,所述运行信息包括方向盘转动角度、油门踏板信号、刹车踏板信号、汽车转向灯信号变化。
57.其中,信息处理模块可根据运行信息获取车辆现有行驶状态,并对未来行驶状态进行分析。
58.若方向盘转动角度、汽车转向灯信号向同一方向变化,则说明驾驶人有转向或变道倾向;
59.若油门踏板信号减弱或加强,则说明驾驶人想要匀速或加速行驶;
60.若刹车踏板信号加强,则说明驾驶人意图降速刹车。
61.本发明实施例通过对运行信息的采集,可对车辆现有行驶情况及为未来行驶方向进行有效分析。
62.可选的,所述信息处理模块还包括无人驾驶安全分析单元,所述无人驾驶安全分析单元用于采集驾驶人的信息,并分析驾驶人是否处于睡眠状态;若驾驶人处于睡眠状态,则由互联模块向云端控制平台发送警示信息。
63.其中,无人驾驶安全分析单元用于获取驾驶人的状态信息,以确定驾驶人是否处于睡眠或精神恍惚状态,若处于睡眠或精神恍惚状态,则说明驾驶人的继续驾驶过程具有较大风险,通过互联模块向其余无人驾驶电动汽车系统发送警示信息,使其余无人驾驶电动汽车系统的驾驶人可根据具体行驶情况,对该车辆进行避让或注意。
64.特别的,所述无人驾驶安全分析单元可选为车内摄像头或方向盘转向感应器。
65.其中,无人驾驶安全分析单元为车内摄像头,可对驾驶人的面部状态进行拍摄,由信息处理模块进行面部表情分析,获取驾驶人的精神状态,达到检测效果。
66.可选的,所述云端控制平台还包括障碍物拟合过程:
67.s201提取多个无人驾驶电动汽车平台所在车辆的环境信息中的障碍物信息,根据地图信息,确定障碍物所在位置;
68.s202将各个无人驾驶电动汽车平台所在车辆的障碍物信息环境信息图中进行信息叠合。
69.其中,以各个车辆为坐标零点,建立各个车辆自身的坐标系,以一个车辆为例:确定该车辆所检测到障碍物在该车辆坐标系的具体坐标,以该车辆在整体环境信息图中的坐标位置,对该车辆所检测到障碍物进行坐标校准,拟合至整体环境信息图中,获得障碍物在整体环境信息图系中坐标位置;将各个车辆所检测到的障碍物进行坐标叠合,若各个障碍物处于同一坐标或相邻坐标(坐标实际差距不大于2m),则认定该多个障碍物为同一物体。
70.特别的,s103中打包后的环境信息设有打包时间戳,所述无人驾驶电动汽车控制平台还包括短程信息发送过程:
71.s301若两个无人驾驶电动汽车平台所在车辆靠近,则各个无人驾驶电动汽车平台的信息处理模块通过互联模块进行互联;
72.s302信息处理模块向另一信息处理模块发送请求,获取该另一信息处理模块的打包时间戳;
73.s303对两个无人驾驶电动汽车平台的打包时间戳进行比对,若不同,则打包时间
戳较新的信息处理模块将该环境信息发送给另一无人驾驶电动汽车平台的信息处理模块。
74.其中,通过对两个无人驾驶电动汽车平台的打包时间戳进行比对,可实现两个无人驾驶电动汽车平台所获得环境信息的比对分析,在某一汽车的互联模块无法及时与云端控制平台进行互联时,可通过与其它汽车的互联模块相连,实现环境信息包的更新。
75.最后应当说明的是,以上实施例仅用以说明本发明的技术方案而非对其限制,尽管参照上述实施例对本发明进行了详细的说明,所属领域的普通技术人员应当理解,技术人员阅读本技术说明书后依然可以对本发明的具体实施方式进行修改或者等同替换,但这些修改或变更均未脱离本发明申请待批权利要求保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。