1.本发明涉及外科手术工具技术领域,具体而言,涉及一种双驱动微创手术刀结构。
背景技术:
2.现有微创手术设备多为通用型设备,病灶的切除主要依靠末端刚性手术剪完成,手术剪本身有一定弧度,配合医生操作,逐步将病灶从体内剪下,但此过程比较考验医生的操作水平,对于较大的病灶,手术剪很难完成指定任务。病灶切除后,大多数病灶会通过手术剪或止血钳夹取出来,这个过程中病灶存在一定概率的破坏风险。此外,某些病灶在取出身体后需要进行切片病理检查,以确保手术将病灶组织完全切净。使用止血钳等工具将病灶夹出体外,容易导致病灶与人体组织之间的相对位置关系丧失,仅能通过后续人工识别进行重定向。
技术实现要素:
3.本发明解决的问题是常规手术过程导致的病灶易破坏不利于病理分析。
4.为解决上述问题,本发明提供一种双驱动微创手术刀结构,所述双驱动微创手术刀结构包括主体结构、抓取组件和切割组件,所述主体结构包括固定管和第一限位管,所述固定管与所述第一限位管同轴心设置,所述固定管位于所述第一限位管内,所述固定管与所述第一限位管之间具有通道,所述抓取组件和所述切割组件分别与所述固定管滑动连接,所述抓取组件与所述切割组件连接,所述抓取组件与所述切割组件适于沿所述通道伸出或缩回所述主体结构,所述切割组件用于病灶的切除,所述切割组件还用于所述抓取组件端部的收缩或放松。
5.可选地,所述抓取组件包括第一滑块结构、支撑管和夹爪结构,所述支撑管的相对两端分别与所述第一滑块结构和所述夹爪结构连接,所述支撑管套设于所述固定管外且与所述固定管滑动连接,所述支撑管位于所述通道中,所述第一滑块结构适于与外部驱动器连接,以通过所述外部驱动器驱动所述第一滑块结构相对于所述固定管滑动。
6.可选地,所述夹爪结构包括夹爪本体和至少两个夹爪,所述夹爪位于所述夹爪本体的一端,所述夹爪本体的另一端与所述支撑管的周向外表面连接。
7.可选地,所述切割组件包括第二滑块结构和至少两根丝线结构、所述丝线结构的两端分别与所述第二滑块结构和所述夹爪的端部连接,所述第二滑块结构适于与外部驱动器连接,以通过所述外部驱动器驱动所述第二滑块结构相对于所述固定管滑动。
8.可选地,所述夹爪上设置有与所述夹爪数量相匹配的软管,所述软管沿所述夹爪的长度方向设置,所述夹爪上还设置有固定件,所述丝线结构适于穿设于所述软管中并与相邻的一个所述夹爪上的所述固定件连接。
9.可选地,所述第一滑块结构上开设有与所述丝线结构数量相匹配的过线孔,所述丝线结构穿设于所述过线孔中。
10.可选地,所述主体结构还包括第二限位管,所述第二限位管套设于所述固定管外
并与所述固定管同轴心设置,所述第二限位管与所述固定管连接,所述第二限位管位于所述第一滑块结构和所述第二滑块结构之间,所述第二限位管的两端适于分别与所述第一滑块结构和\或所述第二滑块结构止挡配合,以限定所述第一滑块结构和\或所述第二滑块结构的滑动距离。
11.可选地,所述主体结构还包括弹性件,所述弹性件的一端与所述第二限位管靠近所述第二滑块结构的一端连接,所述弹性件的另一端适于与所述第二滑块结构相抵接。
12.可选地,所述主体结构还包括刀帽结构和第三限位管,所述刀帽结构与所述固定管连接,所述第三限位管与所述第一限位管连接,所述第一限位管与所述第三限位管同轴心设置,所述刀帽结构由靠近所述固定管的一端向远离所述固定管的一端与所述第三限位管周向内表面的间距逐渐减小,所述刀帽结构与所述第三限位管之间开设有供所述抓取组件与所述切割组件伸出的开口。
13.可选地,所述刀帽结构包括至少两个限位结构,所述限位结构沿着所述刀帽结构的周向设置,所述第三限位管上沿周向开设有与所述限位结构数量相匹配的限位槽,所述限位结构与所述限位槽限位配合,相邻两个所述限位结构用于对所述抓取组件和所述切割组件伸出或缩回所述开口进行导向。
14.相对于现有技术,本发明所述的双驱动微创手术刀结构所具有的有益效果是:
15.通过收纳于主体结构内的抓取组件与切割组件,可以使创口截面积减小到第一限位管的横截面积,到达病灶后,再将抓取组件与切割组件沿着固定管的轴向方向伸出张开,以对略大于创口截面积的病灶组织进行切割与抓取,最大限度地减少病人的手术创伤,同时通过抓取组件和切割组件协调配合,可以实现对病灶的完整切割和包络抓取,以确保病灶取出时的完整性、相对位置确定性,便于病理分析。
附图说明
16.图1为本发明的双驱动微创手术刀结构的一实施例结构示意图;
17.图2为本发明的双驱动微创手术刀结构的一实施例爆炸结构示意图;
18.图3为本发明的双驱动微创手术刀结构的抓取组件与切割组件末端收纳在主体结构中的一实施例结构示意图;
19.图4为本发明的双驱动微创手术刀结构的抓取组件与切割组件末端展开时的一实施例结构示意图;
20.图5为本发明的双驱动微创手术刀结构的抓取组件与切割组件末端合拢时的一实施例结构示意图;
21.图6为本发明的双驱动微创手术刀结构的另一实施例结构示意图;
22.图7为本发明的图6中a处的局部放大图;
23.图8为本发明的双驱动微创手术刀结构的夹爪结构的一实施例结构示意图;
24.图9为本发明的双驱动微创手术刀结构的另一实施例结构示意图;
25.图10为本发明的双驱动微创手术刀结构的一实施例截面结构示意图;
26.图11为本发明的图10中b处的局部放大图;
27.图12为本发明的图10中c处的局部放大图;
28.图13为本发明的双驱动微创手术刀结构的另一实施例结构示意图。
29.附图标记说明:
[0030]1‑
主体结构;11
‑
固定管;12
‑
第一限位管;121
‑
第一开孔;13
‑
第二限位管;14
‑
弹性件;15
‑
刀帽结构;151
‑
限位结构;152
‑
刀片;16
‑
第三限位管;161
‑
限位槽;162
‑
第二开孔;17
‑
壳体;171
‑
第一滑槽结构;172
‑
第二滑槽结构;2
‑
抓取组件;21
‑
第一滑块结构;211
‑
过线孔;22
‑
支撑管;23
‑
夹爪结构;231
‑
夹爪本体;232
‑
夹爪;2321
‑
软管;2322
‑
固定件;3
‑
切割组件;31
‑
第二滑块结构;32
‑
丝线结构;4
‑
通道;5
‑
开口;6
‑
泵帽结构;61
‑
泵帽本体;62
‑
端盖;63
‑
空腔结构;64
‑
排液管。
具体实施方式
[0031]
在本发明的描述中,应当说明的是,各实施例中的术语名词例如“上”、“下”、“前”、“后”、“左”、“右”等指示方位的词语,只是为了便于描述本发明,而不是指示或暗示所指的装置必须具有特定的方位、以特定的方位构造和操作,该类方位名词不构成对本发明的限制。
[0032]
术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或转动连接;可以是机械连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
[0033]
术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”、“第三”的特征可以明示或者隐含地包括至少一个该特征。
[0034]
为使本发明的上述目的、特征和优点能够更为明显易懂,下面结合附图对本发明的具体实施例做详细的说明。
[0035]
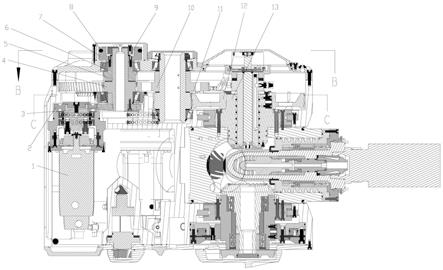
如图1至图5所示,本发明实施例的一实施例提供一种双驱动微创手术刀结构,所述双驱动微创手术刀结构包括主体结构1、抓取组件2和切割组件3,所述主体结构1包括固定管11和第一限位管12,所述固定管11与所述第一限位管12同轴心设置,所述固定管11位于所述第一限位管12内,所述固定管11与所述第一限位管12之间具有通道4,所述抓取组件2和所述切割组件3分别与所述固定管11滑动连接,所述抓取组件2与所述切割组件3连接,所述抓取组件2与所述切割组件3适于沿所述通道4伸出或缩回所述主体结构1,所述切割组件3用于病灶的切除,所述切割组件3还用于所述抓取组件2端部的收缩或放松。
[0036]
在进行微创手术时,由手术刀等先将人体组织切开,抓取组件2与切割组件3收纳于固定管11和第一限位管12之间的通道4中,当人体组织切开后,将收纳有抓取组件2与切割组件3的固定管11和第一限位管12由切开后的创面进入。当主体结构1的一端即将到达病灶组织时,抓取组件2与切割组件3可以张开以包覆病灶组织,切割组件3可以是电热丝,电热丝通过电切割效应将病灶组织切除,病灶组织切除后,切割组件3可以将抓取组件2的端部收缩,以实现病灶组织的抓取。在第一限位管12的前端到达病灶前方时,抓取组件2由第一限位管12与固定管11之间的通道4中向外伸出的同时逐渐张开,抓取组件2采用弹性材料制成,抓取组件2和切割组件3分别与固定管11滑动连接,在抓取组件2逐渐张开的同时电热丝配合抓取组件2释放对应长度的电热丝,以保障抓取组件2的正常张开,此时抓取组件2与切割组件3同时沿着固定管11向前运动。电热丝此时通过电切割效应,随抓取组件2的推进
逐渐展开,将病灶周围组织切断,此展开过程持续到电热丝包络完病灶组织的最大截面。电热丝包络至病灶组织最大截面后,切割组件3不再释放电热丝,也即切割组件3不再向前移动,而抓取组件2继续向前移动,移动的同时抓取组件2的端部继续向前方伸展。而从此时开始,抓取组件2末端绑定的电热丝将开始逐渐拉紧,使夹爪232的前端逐渐产生合拢趋势。
[0037]
如果在手术过程中需要修改或扩大包络目标物,可以在任何运动时刻停止切割包络过程,沿相反的方向依照包络时的速度位置配合运动,即可实现逆向运动。在退出后用户可以根据需要重新确定包络目标物的大小,根据重新确定的目标物大小从新进行病灶组织的抓取与切除。在运动的任意时刻,都可以通过调节电热丝的松紧度控制末端的抓取组件2张开与闭合,使得手术刀在单次手术中具备反复切割的能力,可以大大增加手术的容错率,使医生在切割过程中有较大的修正能力。固定管11可以起到对抓取组件2与切割组件3伸出与缩回时导向的作用,使得抓取组件2与切割组件3只能沿着固定管11的轴向方向移动,第一限位管12与固定管11可以用于抓取组件2与切割组件3的限位,使得抓取组件2与切割组件3只能沿着第一限位管12与固定管11之间的通道4移动,保障抓取组件2与切割组件3沿通道4运行的稳定性。抓取组件2的端部在完成抓取的过程中,抓取组件2的伸展运动与电热丝的拉紧运动将会协调配合,不同的运动速度位置配合将包络出不同的切割轨迹,其端部本身的运行轨迹可以呈椭圆形,同时切割组件3可以用来切除体内最大尺寸小于20mm的病灶组织,在切割组件3带动抓取组件2的端部逐渐闭合的同时对病灶组织进行切割,在切割完成后,用户通过向外将拔出主体结构1,以实现对病灶的切割和包络过程合为一体,确保病灶取出时的完整性、相对位置确定性。由于切割可以一次操作完成,病灶几乎不会在切割时发生大位姿的改变,因此病灶在取出体外后相对身体内的位姿会有更加明确的对应关系,医生在后续进行病灶化验过程中,如果病灶没有完全切除,医生能更加快捷的对比出需要重新进行手术切割的身体位置,使医生手术过程更加高效、简洁。
[0038]
通过收纳于主体结构1内的抓取组件2与切割组件3,可以使创口截面积减小到第一限位管12的横截面积,到达病灶后,再将抓取组件2与切割组件3沿着固定管11的轴向方向伸出张开,以对略大于创口截面积的病灶组织进行切割与抓取,最大限度地减少病人的手术创伤,同时通过抓取组件2和切割组件3协调配合,可以实现对病灶的完整切割和包络抓取,以确保病灶取出时的完整性、相对位置确定性,便于病理分析。
[0039]
如图6和图7所示,所述抓取组件2包括第一滑块结构21、支撑管22和夹爪结构23,所述支撑管22的相对两端分别与所述第一滑块结构21和所述夹爪结构23连接,所述支撑管22套设于所述固定管11外且与所述固定管11滑动连接,所述支撑管22位于所述通道4中,所述第一滑块结构21适于与外部驱动器连接,以通过所述外部驱动器驱动所述第一滑块结构21相对于所述固定管11滑动。
[0040]
主体结构1还可以包括壳体17,第一滑块结构21可以在壳体17内部滑动,壳体17用于固定第一滑块与固定管11,壳体17上可以开设有第一滑槽结构171,第一滑块结构21上可以设置有凸耳,凸耳可以在第一滑槽结构171中滑动,外部驱动器可以通过凸耳驱动第一滑块结构21滑动。外部驱动器可以用于驱动第一滑块结构21沿固定管11的轴向方向移动,支撑管22可以套设于固定管11外,支撑管22与固定管11滑动连接,夹爪结构23可以粘接在支撑管22的外周面,以避免夹爪结构23在伸出或者缩回主体结构1时,与固定管11的外壁或者第一限位管12的内壁产生摩擦导致的夹爪结构23磨损。第一滑块结构21与支撑管22之间可
以采用粘接的方式连接,且第一滑块结构21上可开设有通孔,第一滑块结构21可以通过通孔沿着固定管11的轴向方向移动,支撑管22可以与通孔同轴设置,以便于外部驱动器在驱动第一滑块结构21滑动时,带动支撑管22沿这固定管11的轴向滑动,以实现抓取组件2与切割组件3的伸出与缩回。同时,通过第一滑块结构21可以便于外部驱动器驱动主体结构1中的夹爪结构23伸出或者缩回。
[0041]
如图6、图8、图10和图11所示,所述夹爪结构23包括夹爪本体231和至少两个夹爪232,所述夹爪232位于所述夹爪本体231的一端,所述夹爪本体231的另一端与所述支撑管22的周向外表面连接。
[0042]
夹爪结构23本身可以采用弹性材料制成,优选地,夹爪232的数量可以有5个,相邻两个夹爪232之间的间距可以相等,在进行夹爪结构23的安装时,可以将夹爪本体231沿着支撑管22的周向方向将夹爪本体231卷起,而夹爪232可以围绕固定管11的周向设置,在夹爪本体231与支撑管22之间可以涂有胶,以实现夹爪结构23固定在支撑管22上。
[0043]
如图4和图9所示,所述切割组件3包括第二滑块结构31和至少两根丝线结构32、所述丝线结构32的两端分别与所述第二滑块结构31和所述夹爪232的端部连接,所述第二滑块结构31适于与外部驱动器连接,以通过所述外部驱动器驱动所述第二滑块结构31相对于所述固定管11滑动。
[0044]
第二滑块结构31可以在壳体17内部滑动,壳体17用于固定第二滑块与固定管11,壳体17上可以开设有第二滑槽结构172,第二滑块结构31上可以设置有凸耳,凸耳可以在第二滑槽结构172中滑动,外部驱动器可以通过凸耳驱动第二滑块结构31滑动。丝线结构32的数量与夹爪232的数量相匹配,丝线结构32可以是电热丝,第二滑块结构31上可开设有通孔,第二滑块结构31可以通过通孔沿着固定管11的轴向方向移动,外部驱动器可以驱动第二滑块结构31沿着固定管11的轴向方向滑动,以实现对丝线结构32的收紧与放松。在进行病灶的切除与抓取时,外部驱动器可以同时驱动第一滑块结构21与第二滑块结构31向夹爪232伸出主体结构1的方向移动,此时在逐渐放松丝线结构32的同时,夹爪232伸出时逐渐张开,当夹爪232张开至最大时,外部驱动器可以将第二滑块结构31固定,此时外部驱动器驱动第一滑块结构21继续向夹爪232伸出方向移动。此时丝线结构32处于张紧状态,丝线结构32对夹爪232提供其运动相反方向的力,由于丝线结构32伸出的长度保持不变。在夹爪232逐渐伸出的同时其本身的长度逐渐增加,其自身会产生弹性形变,夹爪232的端部会逐渐产生合拢的趋势,电热丝可以通过电磁切割效应对病灶进行切除,切除后闭合的夹爪232实现对切除的病灶进行包络。同时,通过第二滑块结构31可以便于外部驱动器驱动主体结构1内的丝线结构32张紧或放松。
[0045]
如图4、图5、图10和图11所示,所述夹爪232上设置有与所述夹爪232数量相匹配的软管2321,所述软管2321沿所述夹爪232的长度方向设置,所述夹爪232上还设置有固定件2322,所述丝线结构32适于穿设于所述软管2321中并与相邻的一个所述夹爪232上的所述固定件2322连接。
[0046]
软管2321可以通过粘接的方式粘接在夹爪232远离固定管11的一侧,软管2321可以起到起绝缘作用,防止电热丝上的高频脉冲传导至固定管11、第一限位管12等人体可能接触到的位置,避免其对人体造成伤害。丝线结构32穿过其中一个夹爪232的软管2321中与相邻一个夹爪232上的固定件2322连接,以此实现当夹爪结构23的端部通过自身伸长与丝
线结构32之间力的作用收拢时,夹爪232的端部可以逐渐收缩与固定管11的轴向方向,保障夹爪232收缩与张开的稳定性。
[0047]
如图6和图7所示,所述第一滑块结构21上开设有与所述丝线结构32数量相匹配的过线孔211,所述丝线结构32穿设于所述过线孔211中。
[0048]
过线孔211可以对丝线结构32进行避让,保障第一滑块结构21与第二滑块结构31之间相对独立滑动,且通过过线孔211可以起到对丝线结构32的分离,避免由于丝线结构32过长,当第二滑块结构31控制丝线结构32放松时,放松的丝线结构32之间易发生缠绕。
[0049]
如图9、图10和图12所示,所述主体结构1还包括第二限位管13,所述第二限位管13套设于所述固定管11外并与所述固定管11同轴心设置,所述第二限位管13与所述固定管11连接,所述第二限位管13位于所述第一滑块结构21和所述第二滑块结构31之间,所述第二限位管13的两端适于分别与所述第一滑块结构21和\或所述第二滑块结构31止挡配合,以限定所述第一滑块结构21和\或所述第二滑块结构31的滑动距离。
[0050]
第二限位管13可以起到对第一滑块结构21沿着夹爪232收回方向的极限位置进行限位,避免第一滑块结构21与第二滑块结构31同时收回主体结构1中时,第一滑块结构21移动过度,产生电热丝过度放松易导致电热丝自身缠绕;第二限位管13还可以起到对第二滑块结构31沿着夹爪232伸出方向时的极限位置进行限位,避免第二滑块结构31过度移动导致的电热丝无法张紧,从而导致病灶切除与夹爪232端部无法正常收缩的问题。
[0051]
如图9、图10和图12所示,所述主体结构1还包括弹性件14,所述弹性件14的一端与所述第二限位管13靠近所述第二滑块结构31的一端连接,所述弹性件14的另一端适于与所述第二滑块结构31相抵接。
[0052]
弹性件14可以是弹簧,弹簧的一端固定在第二限位管13的一端,弹簧的另一端为自由端,当第二滑块结构31沿着夹爪232的伸出方向移动时,由于夹爪232的末端可能产生弹性变形。因此当弹簧被第二滑块结构31压缩后,弹簧可以对丝线结构32提供一定的张紧或放松的力,以实现对于夹爪232末端产生弹性形变进行自适应,保障夹爪232的正常收缩。
[0053]
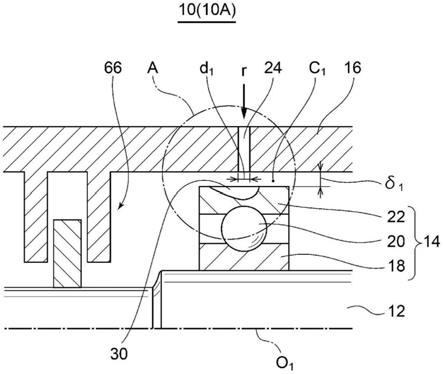
所述主体结构1还包括刀帽结构15和第三限位管16,所述刀帽结构15与所述固定管11连接,所述第三限位管16与所述第一限位管12连接,所述第一限位管12与所述第三限位管16同轴心设置,所述刀帽结构15由靠近所述固定管11的一端向远离所述固定管11的一端与所述第三限位管16周向内表面的间距逐渐减小,所述刀帽结构15与所述第三限位管16之间开设有供所述抓取组件2与所述切割组件3伸出的开口5。
[0054]
第三限位管16与刀帽结构15之间可以形成倾斜的轨道,以此实现夹爪232伸出开口5时,夹爪结构23沿着倾斜轨道逐渐张开,以增加包络病灶组织的直径,在夹爪232逐渐张开的同时电热丝配合夹爪232一起做张开运动,释放对应长度的电热丝,当夹爪232张开至目标病灶组织的最大直径时,电热丝停止释放长度,此时夹爪232继续向病灶组织的后方移动,夹爪232端部的移动轨迹逐渐向中心收缩,以将病灶组织切除。
[0055]
如图1、图3、图10和图13所示,所述刀帽结构15包括至少两个限位结构151,所述限位结构151沿着所述刀帽结构15的周向设置,所述第三限位管16上沿周向开设有与所述限位结构151数量相匹配的限位槽161,所述限位结构151与所述限位槽161限位配合,相邻两个所述限位结构151用于对所述抓取组件2和所述切割组件3伸出或缩回所述开口5进行导向。
[0056]
刀帽结构15的前方可以安装有刀片152,刀片152用于切开人体的表皮组织,切开后的创口用于手术刀的进入以实现对病灶的抓取切除。限位槽161用于限制刀帽沿其轴向转动,通过限位结构151与限位槽161限位配合,保障刀帽位置的相对固定,限位结构151用于将开口5分隔成多个,以实现每个夹爪232由分开的多个开口5中独立的伸出,保障夹爪232之间的间距,达到夹爪结构23最佳的张开效果。主体结构1还包括泵帽结构6,泵帽结构6上设置有排液管64,第三限位管16上还可以开设有第二开孔162,第一限位管12上可以开设有第一开孔121。在手术过程中,由于对人体组织、表皮等进行了切割,会产生渗透液,渗透液可以通过第二开孔162进入固定管11与第一限位管12之间的通道4中,再由第一开孔121流入泵帽结构6的空腔结构63中,泵帽结构6上的排液管64与负压泵连接,负压泵用于将渗出液抽出。泵帽结构6可以包括泵帽本体61与端盖62,端盖62与泵帽本体61之间可拆卸连接,通过将端盖62拆除有利于对空腔结构63中进行清洗,避免细菌滋生。
[0057]
虽然本公开披露如上,但本公开的保护范围并非仅限于此。本领域技术人员在不脱离本公开的精神和范围的前提下,可进行各种变更与修改,这些变更与修改均将落入本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。