1.本发明关于一种蝶形阀,其具有电动机、流路、被连接于电动机且被配置于相对于流路正交的方向上的杆体、及被结合于杆体且通过杆体被电动机旋转而进行流路的开闭的蝶形阀体。
背景技术:
2.先前,在半导体制造工序中,很多于真空腔体与真空泵之间,作为真空压力控制装置配置有流路的导电率较大的蝶形阀,而控制真空腔体的真空压力。例如如专利文献1所开示地,一种蝶形阀,使用通过杆体被电动机旋转,从而被结合于杆体的蝶形阀体与环状阀座接触/分离。专利文献1:日本特开2019
‑
19851号公报
技术实现要素:
3.但是,上述先前技术有如下的问题。
4.上述专利文献1所开示的蝶形阀体,蝶形阀体的中心点在相对于杆体的旋转中心轴偏心的状态下,被结合于杆体。因此,蝶形阀体的重心不在杆体的旋转中心轴上,为了通过蝶形阀体而进行流路的开闭,旋转杆体而产生离心力,因为离心力而杆体的旋转中心轴变得摆动。当杆体的旋转中心轴摆动时,存在下述问题点:对于轴支撑杆体的滚珠轴承的负载变得过大,滚珠轴承会损伤,或者,蝶形阀体与流路的内壁相干涉等,对于蝶形阀的寿命有不良影响。尤其近年来,通过原子层堆积法(ald:atomic layer deposition),半导体制造周期被高速化,所以,由蝶形阀所做的真空压力控制的速度也被高速化,蝶形阀体的自全开至全闭(或者,自全闭至全开)的时间例如0.1秒左右,而旋转速度非常快速。当旋转速度愈快速,愈容易产生由离心力所致的杆体的旋转中心轴的摆动,上述问题点有变得更加显著之虞。
5.本发明是用于解决上述问题点所研发出的,其目的在于提供一种在蝶形阀体开闭时能抑制对于杆体所产生的离心力,能够抑制杆体的旋转中心轴的摆动而变得长寿的蝶形阀。
6.本发明的一方式中的蝶形阀,具有如下构造。
7.(1)一种蝶形阀,其具有:电动机;流路;杆体,被连接于电动机,被配置于相对于流路正交的方向上;以及蝶形阀体,被结合于杆体,通过杆体被电动机旋转,而进行流路的开闭;其特征在于:将至少杆体与蝶形阀体当作构成构件的结合体的重心即结合体重心,位于电动机的旋转轴的轴线上。
8.(2)在(1)的构造中,优选结合体构成为,构成结合体的各构成构件的重心即构成构件重心的任一者被置于通过旋转轴的轴线的虚拟平面上,在虚拟平面上,将被置于被旋转轴的轴线所分隔的一侧区域的构成构件重心与轴线的距离,当作正值,将被置于另一侧区域的构成构件重心与轴线的距离,当作负值,针对各构成构件,算出构成构件重心与轴线
的距离乘上各构成构件的质量所得的力矩,该算出的力矩的合计值大致为0。
9.(3)在(1)或(2)的构造中,优选结合体为蝶形阀体通过固定件结合于杆体而构成,结合体重心为还考虑到固定件的重心的重心。
10.(4)在(3)的构造中,优选固定件为螺丝及垫圈或铆钉的任一种。
11.(5)在(1)或(2)的构造中,优选结合体为蝶形阀体通过焊接结合于杆体而构成,通过焊接产生的焊珠被去除。
12.(6)在(1)~(5)中任一项的构造中,优选电动机为直驱电动机。
13.(7)在(1)~(6)中任一项的构造中,优选设置为,使得杆体由与杆体的轴向相邻接且并列的两个滚珠轴承和套筒以双支撑状态被轴支撑,两个滚珠轴承分别由外轮、内轮、及被配置于外轮与内轮间的转动体所构成,两个滚珠轴承分别被预压,将外轮与转动体之间的接点及内轮与转动体之间的接点连接的虚拟线,相对于杆体的径向方向具有角度,两个滚珠轴承的各虚拟线所夹的角度随着朝向杆体而变大。
14.(8)在(1)~(7)中任一项的构造中,优选包括:温度传感器,测量在内部具有流路的阀本体的温度;加热器,依据温度传感器的测量值,调整阀本体的温度;以及温控器,检知阀本体的过度升温。发明的效果
15.本发明的蝶形阀,通过具有上述构造,而具有如下的作用及效果。
16.当依据上述(1)的构造时,杆体与蝶形阀体的结合体的重心即结合体重心位于电动机的旋转轴的轴线上,所以,即使杆体被电动机旋转,离心力也不太会作用于杆体。如果离心力不太会作用于杆体时,能够抑制杆体的旋转中心轴的摆动。而且,当能够抑制旋转中心轴的摆动时,能够减轻对于轴支撑杆体的构件(例如滚珠轴承)的负载,而且,也能够防止蝶形阀体与流路的内壁相干涉,所以,蝶形阀的寿命也被改善。
17.当依据上述(2)的构造时,结合体构成为,构成结合体的各构成构件的重心即构成构件重心的任一者,皆被置于通过旋转轴的轴线上的虚拟平面上,在虚拟平面上,将被置于被轴线所分隔的一侧的区域的构成构件重心与轴线的距离,当作正值,将被置于另一侧的区域的构成构件重心与轴线的距离,当作负值,针对各构成构件,算出于构成构件重心与轴线的距离乘上各构成构件的质量所得的力矩,该算出的力矩的合计值大致为0。因此,作用于构成结合体的各构成构件的力矩于轴线上取得平衡,结合体的结合体重心变得位于轴线上。因此,即使杆体被电动机旋转,离心力也不太会作用于杆体,能够抑制杆体的旋转中心轴的摆动。
18.当依据上述(3)或(4)的构造时,结合体由蝶形阀体通过称做螺丝及垫圈或铆钉的固定件被结合于杆体而构成,结合体重心为还考虑到固定件的重心的重心,所以,包含固定件的结合体的结合体重心位于电动机的旋转轴的轴线上。因此,即使杆体被电动机旋转,离心力也变得不太会作用于杆体。如果离心力不太会作用于杆体,就能够抑制杆体的旋转中心轴的摆动。
19.当依据上述(5)的构造时,结合体由蝶形阀体通过焊接被结合于杆体而构成,通过焊接而产生的焊珠被去除,所以,结合体重心不被由焊接所产生的焊珠的重心所左右,而仅由杆体的重心及蝶形阀体的重心所决定。
20.当依据上述(6)的构造时,旋转杆体的电动机为直驱电动机,所以,能够高速旋转
杆体。先前很多在蝶形阀中使用步进电动机。但是,当使用步进电动机时,蝶形阀体的自全开至全闭(或者,自全闭至全开)的时间,例如0.5秒左右,很难满足ald所要求的例如0.1秒的速度。在此,虽然考虑到通过使用直驱电动机而高速化,但是,通过高速化,因为离心力而很容易产生杆体的旋转中心轴的摆动,对于轴支撑杆体的滚珠轴承的负载变得过大,滚珠轴承会受损伤,或者,蝶形阀体与流路的内壁相干涉等,对于蝶形阀的寿命有不良影响的问题点显著化。但是,本发明的杆体与蝶形阀体的结合体的重心即结合体重心位于电动机的旋转轴的轴线上,所以,离心力不太会作用于杆体,能够抑制杆体的旋转中心轴的摆动。因此,上述问题点被消除,能够实现由直驱电动机所致的蝶形阀体开闭的高速化。
21.当依据上述(7)的构造时,杆体通过与杆体的轴向相邻接且并列的两个滚珠轴承和套筒以双支撑状态被轴支撑,所以,杆体的旋转中心轴更加稳定,变得不太会摆动。又,所述两个滚珠轴承各自构成为,外轮与转动体的接点及内轮与转动体的接点连接的虚拟线,相对于杆体的径向具有角度,两个滚珠轴承配置为使得各自的虚拟线所夹的角度随着朝向杆体而变大,所以,轴支撑杆体的滚珠轴承的内部间隙不太会产生,刚性提高。当滚珠轴承的刚性提高时,杆体旋转时的震动被抑制,杆体的旋转中心轴的摆动被抑制。当依据上述(8)的构造时,通过温度传感器和加热器,能够调整阀本体的温度。又,通过温控器,能够检知阀本体的过度升温,所以,不会因为加热器失控而过度地加热阀本体。
附图说明
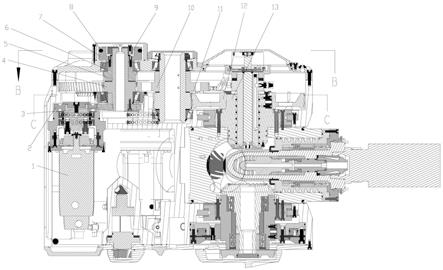
22.图1是本发明实施方式的蝶形阀在平行于旋转轴的轴线且平行于流路的方向上切断后的剖面图。图2是本发明实施方式的蝶形阀在平行于旋转轴的轴线且正交于流路的方向上切断后的剖面图。图3是本发明实施方式的蝶形阀的正交于旋转轴的轴心的剖面图,表示蝶形阀体位于全闭位置的状态。图4是本发明实施方式的蝶形阀的正交于旋转轴的轴心的剖面图,表示蝶形阀体位于全开位置的状态。图5是图1的旋转结合体的放大图。图6是图1的滚珠轴承周边的放大图。图7是使用本发明实施方式的蝶形阀的真空压力控制系统的示意图。图8是表示旋转结合体的变形例的图。
具体实施方式
23.针对本发明蝶形阀1的实施方式,参照图面以做详细说明。蝶形阀1在半导体制造工序中,被配设于连接真空腔体32与真空泵33的配管34上,作为对自气体供给源37源源不绝地供给气体的真空腔体32的压力进行控制的真空压力控制装置使用(参照图7)。
24.图1是本发明实施方式的蝶形阀1的平行于流路30的方向的剖面图。又,图2是本发明实施方式的蝶形阀的正交于流路的方向的侧方剖面图。如图1及图2所示,蝶形阀1由驱动部2与阀部3所构成。
25.驱动部2具有做为电动机一例的直驱电动机(以下,称做dd电动机)11,如图7所示,dd电动机11被连接于电动机驱动器12与编码器14。又,电动机驱动器12被连接于控制基板13。dd电动机11无须减速机等的中间机构,所以,在小型化驱动部2、减少噪音之外,还能够提高反应性能、速度稳定性能、定位精度。因此,提高由蝶形阀1所做的真空压力控制的精度。又,如图1及图2所示,dd电动机11具有旋转轴11a,将旋转轴11a的旋转中心轴当作轴线ra。
26.如图7所示,在控制基板13连接有电动机驱动器12、及检出真空腔体32的压力的压力计35。控制基板13具有存储单元131,存储单元131存储有例如对应蝶形阀体9的全闭位置的杆体10的旋转角度及对应蝶形阀体9的全开位置的杆体10的旋转角度、对应真空腔体32的任意的目标压力等的杆体10的旋转角度。而且,依据自存储单元131被读出的旋转角度,电动机驱动器12控制dd电动机11的旋转。
27.如图1及图2所示,驱动部2经由散热器15与绝热构件16,与阀部3相连结。阀部3通过流动在流路30的流体及后述的加热器27,被加热至约200℃,但是,通过散热器15与绝热构件16,防止阀部3的热被传递到驱动部2。
28.阀部3具有阀本体8、杆体10、及蝶形阀体9。阀本体8由具有耐腐蚀性或耐热性的不锈钢所构成。阀本体8在图1中的右端部包括输入埠5,在图1中的左端部包括输出埠6。在输入埠5的内壁形成有输入侧流路8b,在输出埠6的内壁形成有输出侧流路8c。而且,在输入侧流路8b与输出侧流路8c之间,形成有由剖面圆弧状的内壁所构成的阀孔8a。输入侧流路8b与阀孔8a与输出侧流路8c被设于同轴上,构成连续的流路30。输入埠5被连接于真空腔体32,输出埠6被连接于真空泵33,通过流路30而进行真空腔体的排气。
29.又,如图2所示,阀本体8包括当作温度传感器的热电偶28,热电偶28测量阀本体8的温度。而且,阀本体8保持流动在流路30的流体的温度,所以,夹持阀孔8a地包括一对加热器27。加热器27为筒式加热器,其与蝶形阀1的外部的控制装置(未图标)相连接。而且,加热器27通过控制装置,依据热电偶28的测量值而进行on或off的控制,调整阀本体8的温度。而且,阀本体8包括温控器29。温控器29在加热器27失控而阀本体8被过度加热时作动。当温控器29作动时,控制装置停止加热器27。
30.而且,阀本体8具有贯穿图1中的上表面和阀孔8a的插入孔8d,在插入孔8d插入有杆体10。被插入插入孔8d的杆体10,在相对于流路30正交的方向上被架设于阀孔8a。
31.杆体10是通过切削具有耐腐蚀性或耐热性的不锈钢而形成圆柱状的构件。杆体10的被插入流路30的部分,包括阀体安装部10b,正交于轴线ra的方向的剖面略呈d字形(参照图3及图4)。杆体10的未插入流路30侧的一端,经由接头17以被连接于dd电动机11的旋转轴11a。接头17为金属板簧式的联轴器,通过具有接头17,即使杆体10被流体加热,该热也变得不太会传递到dd电动机11。
32.在杆体10与插入孔8d的内壁之间,因为密封,o型环18、19、20在杆体10轴向上,三个并列配置。o型环18、19、20被杆体10的外周面与插入孔8d的内壁所压缩,而防止流动在流路30的流体通过插入孔8d而往驱动部2侧泄漏。而且,o型环18、19、20三个皆为同一种类。
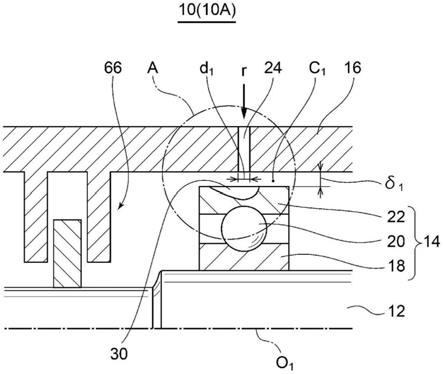
33.又,杆体10被插入流路30侧的一端,通过套筒22而可旋转地被轴支撑。套筒22由耐腐蚀性较高且滑动性较好的塑料所构成。又,杆体10在阀本体8的外侧,通过与杆体10的轴向相邻接且并列的两个滚珠轴承21a、21b,可旋转地被轴支撑。杆体10通过滚珠轴承21a、
21b与套筒22,以双支撑状态被轴支撑,由此,旋转中心轴稳定而变得不太会摆动。
34.各滚珠轴承21a、21b被轴环23、轴承保持器24、及杆体10的凸缘部10a(参照图6)预压。
35.针对预压,使用图6以详细说明。轴承保持器24的突起部24a位于滚珠轴承21a与滚珠轴承21b之间,推动滚珠轴承21a的外轮211a往箭头f1方向,同时推动滚珠轴承21b的外轮211b往f2方向。而且,通过轴环23与杆体10的凸缘部10a,滚珠轴承21a的内轮212a自图中的上方向(箭头f3)被压缩,滚珠轴承21b的内轮212b自图中的下方向(箭头f4)被压缩。
36.自箭头f1、f2、f3、f4的方向,施加力量于外轮211a、211b和内轮212a、212b,由此,将外轮211a(211b)与转动体213a(213b)的接点cp1a(cp1b)、及内轮212a(212b)与转动体213a(213b)的接点cp2a(cp2b)连接的虚拟线vla(vlb),相对于该杆体的径向(图中箭头rd的方向)具有角度,虚拟线vla与虚拟线vlb所夹的角度随着朝向杆体10而扩大。
37.通过如上地被预压,滚珠轴承21a、21b变得不太会产生内部间隙,刚性提高,所以,杆体10旋转时的震动被抑制,杆体10的旋转中心轴的摆动被抑制。
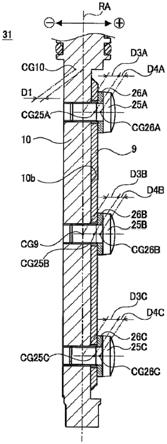
38.蝶形阀体9是通过切削具有耐腐蚀性或耐热性的不锈钢而形成为圆板状的构件。如图2所示,外径与阀孔8a的内径大概相同,蝶形阀体9的外周与阀孔8a的内壁的间隙,变得极小。又,蝶形阀体9为了调整蝶形阀体9的重心cg9(参照图5)的位置而具有凹部9a,正交于轴线ra的方向的剖面呈略微凹字状(略呈c字形)(参照图3及图4)。而且,如图5所示,蝶形阀体9通过螺丝25a、25b、25c及垫圈26a、26b、26c而被结合于杆体10,与杆体10一同构成旋转结合体31。而且,螺丝25a、25b、25c皆为同一种类的螺丝,垫圈26a、26b、26c也皆为同一种类的垫圈。
39.由杆体10、蝶形阀体9、螺丝25a、25b、25c及垫圈26a、26b、26c所构成的旋转结合体31,当dd电动机11的旋转轴11a以轴线ra为中心而往正方向k旋转时,构成旋转结合体31的杆体10经由接头17于被连接于旋转轴11a,所以,旋转结合体31往做为正方向的箭头k(参照图1及图2)的方向旋转。由此,阻塞阀孔8a的蝶形阀体9往同方向旋转,而成为流路30被开放的全开位置(参照图4)。由此,变得能够自真空腔体32大量排气。
40.另外,当dd电动机11的旋转轴11a以轴线ra为中心,往做为与开阀时相反的负方向的箭头
‑
k(参照图1及图2)的方向旋转时,旋转结合体31往
‑
k方向旋转,蝶形阀体9成为阻塞阀孔8a的全闭位置(参照图3)。此时,在蝶形阀体9的外周面与阀孔8a的内壁之间,设有极小的间隙,所以,其并非被完全密封的状态,蝶形阀体9发挥节流的角色。因此,真空腔体32处于排气不被停止而不断地被排气的状态。其因为在ald中,只要能够控制真空腔体的压力即可,无须完全密封流路30。又,旋转结合体31通过编码器14而被掌握旋转角度,蝶形阀体9自全开位置往全闭位置(或者,自全闭位置往全开位置)旋转时的旋转角度为90
°
。
41.又,旋转结合体31的重心(结合体重心),位于做为dd电动机11的旋转轴11a的旋转中心轴的轴线ra上。由此,即使杆体10被dd电动机11旋转,离心力变得也不太会作用于杆体10。如果离心力变得也不太会作用于杆体10时,就能够抑制杆体10的旋转中心轴的摆动。
42.使旋转结合体31的重心位于轴线ra上,所以旋转结合体31如下地构成。
43.旋转结合体31的构成旋转结合体31的杆体10、蝶形阀体9、螺丝25a、25b、25c及垫圈26a、26b、26c的各重心即构成构件重心的任一者,皆被置于通过轴线ra的虚拟平面vp(参照图3)上。在此,将杆体10的构成构件重心当作重心cg10,将蝶形阀体9的构成构件重心当
作重心cg9,将螺丝25a、25b、25c的构成构件重心分别当作重心cg25a、cg25b、cg25c,将垫圈26a、26b、26c的构成构件重心,分别当作重心cg26a、cg26b、cg26c(参照图5)。
44.而且如下所示构成:在虚拟平面vp上,将被置于被轴线ra所分隔的一侧的区域的构成构件重心与轴线ra的距离当作正值,将被置于另一侧的区域的构成构件重心与轴线ra的距离当作负值,针对各构成构件,算出于构成构件重心与轴线ra的距离乘上各构成构件的质量所得的力矩,该算出的力矩的合计值为0。
45.当详细地说明时,如图5所示,将被轴线ra所分隔的纸面上右侧的区域中的重心cg25a与轴线ra的距离d3a、重心cg25b与轴线ra的距离d3b、重心cg25c与轴线ra的距离d3c、重心cg26a与轴线ra的距离d4a、重心cg26b与轴线ra的距离d4b、重心cg26c与轴线ra的距离d4c,当作正值,将被轴线ra所分隔的左侧的区域中的重心cg10与轴线ra的距离d1,当作负值(d3a、d3b及d3c皆是相同值,所以,以下统一为d3,d4a、d4b及d4c皆是相同值,所以,以下统一为d4作说明)。而且,虽然将蝶形阀体9的重心cg9与轴线ra的距离当作距离d2,但是,在本实施方式中,重心cg9位于轴线ra上,所以,距离d2为0,未图示。
46.而且,如果将杆体10的质量当作w,将蝶形阀体9的质量当作x,将螺丝25a、25b、25c的质量分别当作y,将垫圈26a、26b、26c的质量分别当作z时,算出作用于杆体10的力矩为w
×
d1,作用于蝶形阀体9的力矩为x
×
d2,作用于螺丝25a、25b、25c的力矩分别为y
×
d3,作用于垫圈26a、26b、26c的力矩分别为z
×
d4。
47.而且,各力矩所得的合计值(亦即,w
×
d1 x
×
d2 (y
×
d3)
×
3 (z
×
d4)
×
3)为0。使旋转结合体31为如以上的构造,由此,作用在构成旋转结合体31的各构成构件的力矩,在轴线ra上取得平衡,旋转结合体31的重心,变得位于轴线ra上。而且,图5所图标的重心的位置皆为一例,本发明并不局限于图示的内容。
48.接着,说明使用蝶形阀1的真空压力控制的概要。蝶形阀体9即使位于图3所示的全闭位置时,相对于阀孔8a的内周面也具有极小的间隙,所以,其发挥节流的角色。因此,蝶形阀1通过真空泵33的吸引,总是进行真空腔体32的排气。图4所示为蝶形阀体9的全开位置,蝶形阀体9以真空腔体32成为目标的压力地,自全闭位置(旋转角度0度)至全开位置(旋转角度90度)之间,旋转任意的旋转角度,而调整流路30的流路面积。
49.例如在全闭位置的状态,或者,自被旋转任意旋转角度后的位置,进行更大量的排气,而降低真空腔体32的压力时,蝶形阀1的控制基板13,自存储单元131读出对应当作目标的压力的旋转角度。而且,依据被读出的旋转角度,电动机驱动器12使用编码器14以驱动dd电动机11。杆体10通过dd电动机11往正方向k被旋转至被读出的旋转角度。与杆体10一同构成旋转结合体31的蝶形阀体9,与杆体10一体性地往正方向k旋转,放大被节流后的流路30的流路面积。
50.当在全开位置的状态,或者自被旋转任意旋转角度后的位置,节流排气的量而上升真空腔体32的压力时,蝶形阀1的控制基板13,自存储单元131读出对应当作目标的压力的旋转角度。而且,依据被读出的旋转角度,电动机驱动器12使用编码器14以驱动dd电动机11。而且,杆体10往做为与降低真空腔体32的压力时的反向的
‑
k方向旋转。与杆体10一同构成旋转结合体31的蝶形阀体9,与杆体10一体性地往
‑
k方向旋转,节流被放大后的流路30的流路面积。
51.而且,旋转结合体31的变形例,为了结合蝶形阀体9于杆体10,有考虑使用螺丝
25a、25b、25c及垫圈26a、26b、26c之外,如图8所示,使用铆钉36a、36b、36c。
52.说明通过使用铆钉36a、36b、36c而构成的旋转结合体41。如图8所示,蝶形阀体9通过铆钉36a、36b、36c被固定于杆体10。
53.使旋转结合体41的重心位于轴线ra上,所以,分别作用于杆体10、蝶形阀体9及铆钉36a、36b、36c的力矩的合计成为0。亦即,将铆钉36a、36b、36c的各构成构件重心,分别当作重心cg36a、cg36b、cg36c,将重心cg36a、cg36b、cg36c与轴线ra的距离,分别当作d5a、d5b、d5c(d5a、d5b及d5c皆是相同值,所以,以下统一为d5以做说明),而且,如果使铆钉36a、36b、36c的各质量当作v时,其成为w
×
d1 x
×
d2 (v
×
d5)
×
3=0。使旋转结合体41为如以上的构造,由此,旋转结合体41的重心成为位于轴线ra上。
54.而且,旋转结合体31的变形例,有考虑使蝶形阀体9与杆体10的结合,通过焊接以进行。当通过焊接以进行结合时,控制由焊接所产生的焊珠的量很困难,所以,控制重心的位置变得困难。因此,在进行焊接后,必须削除焊珠。如果通过削除焊珠,仅考虑使杆体10的质量w与距离d1相乘所得的力矩及使蝶形阀体9的质量x与距离d2相乘所得的力矩,以构成旋转结合体时,能够使旋转结合体的重心位于轴线ra上。
55.如上所述,当依据本实施方式的蝶形阀1时,在具有电动机(dd电动机11)、流路30、被连接于电动机(dd电动机11)且被配置于相对于流路30正交的方向上的杆体10、及被结合于杆体10,通过杆体10被电动机(dd电动机11)旋转,而进行流路30的开闭的蝶形阀体9的蝶形阀1中,将至少杆体10与蝶形阀体9当作构成构件的结合体(旋转结合体31)的重心即结合体重心,位于电动机(dd电动机11)的旋转轴11a的轴线ra上。因此,即使杆体10被电动机(dd电动机11)旋转,离心力也变得不太会作用于杆体10。如果离心力变得不太会作用于杆体10时,就能够抑制杆体10的旋转中心轴的摆动。而且,如果能够抑制旋转中心轴的摆动时,就能够减轻对于轴支撑杆体10的滚珠轴承21a、21b的负载,而且,也能够防止蝶形阀体9干涉到流路30(阀孔8a)的内壁,所以,蝶形阀1的寿命也被改善。
56.又,当依据本实施方式的蝶形阀1时,结合体(旋转结合体31)的构成结合体(旋转结合体31)的各构成构件(蝶形阀体9、杆体10、螺丝25a、25b、25c及垫圈26a、26b、26c)的重心即构成构件重心(重心cg9、cg10、cg25a、cg25b、cg25c、cg26a、cg26b、cg26c),皆被置于通过旋转轴11a的轴线ra的虚拟平面vp上,在虚拟平面vp上,将被置于被旋转轴11a的轴线ra所分隔的一侧的区域的构成构件重心(重心cg25a、cg25b、cg25c、cg26a、cg26b、cg26c)与轴线ra的距离当作正值,将被置于另一侧的区域的构成构件重心(重心cg10)与轴线ra的距离当作负值,在各构成构件(蝶形阀体9、杆体10、螺丝25a、25b、25c及垫圈26a、26b、26c),算出在构成构件重心(重心cg9、cg10、cg25a、cg25b、cg25c、cg26a、cg26b、cg26c)与轴线ra的距离乘上各构成构件的质量(w、x、y、z)所得的力矩,该算出的力矩的合计值大致为0。因此,作用在构成结合体(旋转结合体31)的各构成构件的力矩,在轴线ra上取得平衡,结合体(旋转结合体31)的结合体重心,变得位于轴线ra上。因此,即使杆体10被电动机(dd电动机11)旋转,离心力也变得不太会作用于杆体10,而能够抑制杆体10的旋转中心轴的摆动。
57.又,当依据本实施方式的蝶形阀1时,结合体(旋转结合体31)由蝶形阀体9通过固定件被结合于杆体10而构成,结合体重心也为考虑到固定件的重心的重心,又,固定件螺丝25a、25b、25c及垫圈26a、26b、26c或铆钉36a、36b、36c的任一种。因此,结合体(旋转结合体31)由蝶形阀体9通过称作螺丝25a、25b、25c及垫圈26a、26b、26c或铆钉36a、36b、36c的固定
件被结合于杆体10而构成,结合体重心也为考虑到固定件的重心的重心。因此,包含固定件的结合体(旋转结合体31)的结合体重心,位于电动机(dd电动机11)的旋转轴的轴线上,即使杆体10被电动机(dd电动机11)旋转,离心力也变得不太会作用于杆体10。如果离心力变得不太会作用于杆体10时,就能够抑制杆体10的旋转中心轴的摆动。
58.又,当依据本实施方式的蝶形阀1时,结合体(旋转结合体31)由蝶形阀体9通过焊接而结合于杆体10所构成,由焊接所产生的焊珠被去除。因此,结合体重心不被由焊接所产生的焊珠的重心所左右,而仅由杆体10的重心cg10及蝶形阀体9的重心cg9决定。
59.又,当依据本实施方式的蝶形阀1时,电动机为dd电动机11。因此,旋转杆体10的电动机为dd电动机11,所以,能够高速旋转杆体10。先前,在蝶形阀1中,很多使用步进电动机,但是,当使用步进电动机时,蝶形阀体9的自全开至全闭为止(或者,自全闭至全开为止)的时间,例如0.5秒左右时,很难满足ald所要求的例如0.1秒的速度。在此,考虑通过使用dd电动机11而高速化,但是,因为高速化,很容易产生由离心力所致的旋转中心轴的摆动,对于轴支撑杆体10的滚珠轴承21a、21b的负载变得过大,而受损伤、蝶形阀体9干涉到流路30(阀孔8a)的内壁等,对于蝶形阀1的寿命有不良影响的问题点显著化。但是,本发明的杆体10与蝶形阀体9的结合体(旋转结合体31)的重心即结合体重心,位于dd电动机11的旋转轴11a的轴线ra上,所以,离心力不太会作用于杆体10,而能够抑制杆体10的旋转中心轴的摆动。因此,上述问题点被消除,能够实现由dd电动机11所做的蝶形阀体9开闭的高速化。
60.又,当依据本实施方式的蝶形阀1时,杆体10通过与杆体10的轴向相邻接且并列的两个滚珠轴承21a、21b与套筒22,被轴支撑为双支撑状态。两个滚珠轴承21a、21b分别由外轮211a、211b、内轮212a、212b、及被配置于外轮211a、211b与内轮212a、212b间的转动体213a、213b所构成。两个滚珠轴承21a、21b分别被预压,将外轮211a、211b与转动体213a、213b的接点及内轮212a、212b与转动体213a、213b的接点连接的虚拟线vla、vlb,相对于杆体的径向具有角度,两个滚珠轴承的各虚拟线vla、vlb所夹的角度随着朝向杆体10而扩大。因此,杆体10通过与杆体10的轴向相邻接且并列的两个滚珠轴承21a、21b与套筒22,被轴支撑为双支撑状态,所以,旋转中心轴更稳定,变得不太会摆动。
61.又,两个滚珠轴承21a、21b的构造配置为,将外轮211a、211b与转动体213a、213b的接点、及内轮212a、212b与转动体213a、213b的接点连接的虚拟线vla、vlb,相对于杆体10的径向具有角度,两个滚珠轴承21a、21b的各虚拟线vla、vlb所夹的角度,随着朝向杆体10而扩大,所以,变得不太会产生轴支撑杆体10的滚珠轴承21a、21b的内部间隙,刚性提高。当滚珠轴承21a、21b的刚性提高时,杆体10旋转时的震动被抑制,杆体10的旋转中心轴的摆动被抑制。
62.又,当依据本实施方式的蝶形阀1时,其包括:温度传感器(热电偶28),测量在内部具有流路30的阀本体8的温度;加热器27,依据温度传感器(热电偶28)的测量值,调整阀本体8的温度;以及温控器29,检知阀本体8的过度升温。因此,通过热电偶28与加热器27,能够调整阀本体8的温度。又,通过温控器29,能够检知阀本体8的过度升温,所以,不会因为加热器27的失控而过度加热阀本体8。
63.而且,本实施方式只不过为例示,其并非用于局限本发明。因此,本发明当然在不脱逸其要旨的范围内,能够做种种改良或变形。例如在本实施方式中,即使蝶形阀体9位于全闭位置,其也并不成为完全密封流路30,但是,也可以通过在阀孔8a设置阀座而抵接蝶形
阀体9于阀座,从而能够完全密封。附图标号
64.1:蝶形阀9:蝶形阀体10:杆体11:直驱电动机(电动机的一例)11a:旋转轴30:流路31:旋转结合体(结合体的一例)ra:轴线。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。