1.本发明涉及神经科领域,更具体的说是一种神经科束缚机构。
背景技术:
2.在神经科进行手术时,难免会遇到在手术过程中触碰到某一处的神经的情况,尤其在对腿部进行手术时,腿部会发生不自觉的活动,影响手术的稳定性,并且影响患者的安全,现有技术中一种神经科快速束缚器,神经科快速束缚器可以保护患者的肌肉、血管和皮肤避免造成挤压和伤害,但是它不适合对神经科对小腿和大腿之间活动进行束缚,提高手术安全性。
技术实现要素:
3.本发明的目的是提供一种神经科束缚机构,可以对神经科对小腿和大腿之间活动进行束缚,提高手术安全性。
4.本发明的目的通过以下技术方案来实现:一种神经科束缚机构,包括束缚架、顶环、底架、中环、侧板、长方架、长杆、限位杆和两个夹持机构,束缚架顶部设有顶环,中环固接在束缚架下侧的中部,束缚架下侧的前后两侧分别设有一个底架,每个底架的下侧均设有一个侧板,长方架左侧的前后两侧分别与两个底架右侧的中部固定连接,长杆设有两个,两个长杆分别固接在长方架内部的前后两侧,每个侧板的下侧均设有一个限位杆,中环底部的前后两侧分别活动连接一个夹持机构。
5.所述两个夹持机构镜像对称设置。
6.所述夹持机构包括伸缩杆、夹持弧和牵动板,伸缩杆设有两个,两个伸缩杆的固定端分别活动连接在中环下侧的前后两侧,每个伸缩杆的活动端均转动连接一个夹持弧后侧的中部,每个夹持弧后侧中部的下侧均设有一个牵动板,两个牵动板分别活动连接在两个限位杆上。
7.还包括旋转弧、卡位柱、短杆和条孔框,旋转弧的前后两侧分别设有一个卡位柱,每个卡位柱的左侧均活动连接一个短杆,旋转弧底部的前后两侧分别转动连接在中环右侧的前后两侧,两个卡位柱的中部分别活动连接在顶环的前后两侧,旋转弧下侧的前后两侧分别设有一个条孔框。
附图说明
8.下面结合附图和具体实施方法对本发明做进一步详细的说明。
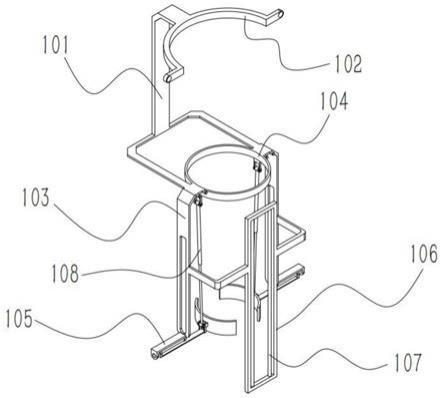
9.图1是本发明束缚架的局部结构示意图;
10.图2是本发明底架的部分结构示意图;
11.图3是本发明夹持机构的部分结构示意图;
12.图4是本发明旋转弧的部分结构示意图;
13.图5是本发明按摩轮的部分结构示意图;
14.图6是本发明定位架的部分结构示意图;
15.图7是本发明按压弧的部分结构示意图;
16.图8是本发明的整体结构示意图ⅰ;
17.图9是本发明的整体结构示意图ⅱ;
18.图10是本发明的局部结构放大示意图;
19.图中:束缚架101;顶环102;底架103;中环104;侧板105;长方架106;长杆107;伸缩杆108;限位杆109;夹持弧110;牵动板111;旋转弧201;卡位柱202;短杆203;条孔框204;升降架205;电机206;旋转杆207;带轮208;皮带209;按摩轮210;凸部211;定位架301;凸座302;手柄303;丝杠304;移动架305;条孔板306;双向推杆307;直角架308;按压弧309;
具体实施方式
20.该部分根据图1和2中所表达的工作过程是:顶环102固接在束缚架101上端的右侧,束缚架101下端的中部固接有中环104,底架103设有两个,两个底架103分别固接在束缚架101下端的前后两端,侧板105设有两个,两个侧板105分别固接在两个底架103的下端,两个底架103右侧的中部分别与长方架106左侧的前后两侧固定连接,长方架106内部的前后两端分别固接有一个长杆107,限位杆109设有两个,两个限位杆109分别固接在两个侧板105的下端,夹持机构设有两个,两个夹持机构分别转动连接在中环104下端的前后两端。
21.作进一步说明,使用时,为便于神经科对小腿和大腿之间活动进行束缚时,位于上侧的顶环102便于贴合大腿,依次向下中环104便于贴合到小腿的上沿位置,由附图1中可看出顶环102与中环104的位置便于将人体的腿部进行竖直束缚,防止在神经科进行手术时由于触碰到神经位置而导致在进行腿部的手术时腿部发生回弯,而位于中环104下端的两个夹持机构便于将患者的小腿底部位置进行夹持,并且与现有技术不同的时,便于夹持不同腿型的小腿,使得手术更加稳定。
22.该部分根据图1和2中所表达的工作过程是:转动连接在中环104下端的前后两端的两个夹持机构镜像对称设置。
23.作进一步说明,两个夹持机构的镜像对称设置便于从小腿底部的两侧进行夹持,便于后续对跟腱位置进行手术时留出多余的神经科内的对跟腱位置进行手术。
24.该部分根据图1、2和3中所表达的工作过程是:夹持弧110设有两个,每个夹持弧110的后侧均固接一个牵动板111,伸缩杆108设有两个,两个伸缩杆108的活动端分别转动连接在两个夹持弧110后侧的上部,两个伸缩杆108的固定端分别转动连接在中环104下端的前后两端,两个牵动板111分别滑动连接在两个限位杆109上。
25.作进一步说明,对小腿的底部进行夹持时,将两个夹持弧110向中部移动,在两个牵动板111带动两个夹持弧110移动时以两个限位杆109为轨道进行水平方向的移动,由此上侧的两个伸缩杆108做适应性的伸长或者缩短,便于后续对小腿的跟腱位置进行手术而特意留出中部的空隙位置,并且当两个夹持弧110向中部移动时,还可以提供发生肌肉偏移以及开放式的骨折进行复位的力,便于医生的及时手术的便利。
26.该部分根据图4、5、8和9中所表达的工作过程是:卡位柱202设有两个,两个卡位柱202分别可拆卸连接在旋转弧201的前后两端,每个旋转弧201上均可拆卸连接有一个短杆203,中环104右侧的前后两侧上分别转动连接有旋转弧201下端的前后两端,条孔框204设
有两个,两个条孔框204分别固接在旋转弧201下侧的前后两端,顶环102的前后两端分别可拆卸连接有一个卡位柱202的中部。
27.作进一步说明,在神经科对对小腿和大腿之间活动进行束缚时,由医生进行操控,将旋转弧201以底部位置为旋转中心进行旋转,将旋转弧201上侧的弧部贴合到顶环102上,便于将大腿底部靠近膝盖位置进行按压夹持固定,进一步的将两个卡位柱202插入到顶环102前后两侧之后,再由两个短杆203对两个卡位柱202进行固定,防止腿部在进行手术时发生弯折。
28.2.根据权利要求4所述的一种神经科束缚机构,其特征在于:所述旋转弧201上侧的半径与顶环102的半径相同。
29.该部分根据图4、5、8和9中所表达的工作过程是:所述顶环102的圆弧的半径与旋转弧201的圆弧半径相同,通过两个卡位柱202来固定。
30.作进一步说明,旋转弧201上侧的半径与顶环102的半径相同时便于将大腿进行固定。
31.3.根据权利要求5所述的一种神经科束缚机构,其特征在于:还包括升降架205、电机206、旋转杆207、带轮208、皮带209、按摩轮210和凸部211,升降架205右侧的前后两侧分别转动连接一个旋转杆207,每个旋转杆207的左侧均设有一个按摩轮210,每个按摩轮210的左侧沿圆周方向均匀设有多个凸部211,每个旋转杆207的右侧均固接一个带轮208,两个带轮208通过皮带209固定连接,电机206通过输出轴与位于前侧的旋转杆207固定连接,电机206与升降架205前侧固定连接,升降架205的前后两侧分别活动连接在两个条孔框204上。
32.该部分根据图4、5、8和9中所表达的工作过程是:旋转杆207设有两个,两个旋转杆207的分别转动连接在升降架205的前后两端,带轮208设有两个,两个带轮208分别固接在两个旋转杆207的右端,皮带209将两个带轮208进行传动连接,电机206的输出轴通过联轴器与位于前端的旋转杆207固定连接,电机206固接在升降架205的前端,按摩轮210设有两个,两个按摩轮210分别固接在两个旋转杆207的左端,每个按摩轮210的左侧端面上部沿圆周方向均匀设有多个凸部211,两个条孔框204内分别滑动连接有升降架205的前后两端。
33.作进一步说明,在对小腿进行进行手术时,为防止大腿腿部的血管收到影响从而缓解其肿胀时,驱动电机206带动位于前侧的旋转杆207旋转,在皮带209的传动下,两个旋转杆207同时发生旋转,进一步的带动两个按摩轮210进行旋转,并且由两个按摩轮210贴合大腿的左侧端面带动按摩轮210左侧端面上的凸部211对大腿进行按摩,缓解且肿胀,并且便于缓解手术结束后患者的疼痛感,并且根据不同的位置可以调节升降架205的上下位置,提高缓解手术时大腿肿胀的效率。
34.4.根据权利要求6所述的一种神经科束缚机构,其特征在于:所述两个按摩轮210为橡胶材质。
35.该部分根据图4、5、8和9中所表达的工作过程是:固接在两个旋转杆207左端的两个按摩轮210为橡胶材质。
36.作进一步说明,两个按摩轮210为橡胶材质,便于进一步的贴合大腿进行按摩,增强对大腿的包裹性。
37.5.根据权利要求7所述的一种神经科束缚机构,其特征在于:还包括双向推杆307、
直角架308和按压弧309,直角架308镜像对称设有两个,两个直角架308分别固接在双向推杆307的两个活动端上,每个直角架308上均固接一个按压弧309。
38.该部分根据图6、7、8、9和10中所表达的工作过程是:按压弧309设有两个,每个按压弧309的右端均固接一个直角架308,两个直角架308镜像对称设置,两个直角架308的上端分别固接在双向推杆307的两个活动端。
39.作进一步说明,当神经科对腿部的自由活动进行束缚之后,在对跟腱撕裂进行迷你开放式的手术时,为防止撕裂的跟腱发生肌肉收缩,进一步的在双向推杆307带动两个按压弧309向中部移动,将撕裂的跟腱靠近上侧肌肉一侧的跟腱进行夹持,防止该跟腱在迷你开放式的手术中无法进行固定,进而在固定之后便于手术医生对跟腱进行缝合手术。
40.6.根据权利要求8所述的一种神经科束缚机构,其特征在于:所述两个按压弧309镜像对称设置。
41.该部分根据图6、7、8、9和10中所表达的工作过程是:所述固接在两个直角架308左端的两个按压弧309镜像对称设置。
42.作进一步说明,两个按压弧309镜像对称设置便于从两侧对跟腱进行夹持固定。
43.10.根据权利要求9所述的一种神经科束缚机构,其特征在于:还包括定位架301、凸座302、手柄303、丝杠304、移动架305和条孔板306,凸座302设在定位架301的右侧,凸座302上转动连接有丝杠304,丝杠304的右侧固接有手柄303,移动架305的上侧传动连接在丝杠304上,移动架305下侧的前后两侧分别设有一个条孔板306,双向推杆307的固定端固接在移动架305的中部,两个直角架308的上侧分别活动连接在两个条孔板306内,两个按压弧309的右侧分别活动连接在定位架301下侧的前后两侧,定位架301上侧的前后两侧分别活动连接在两个长杆107上。
44.该部分根据图6、7、8、9和10中所表达的工作过程是:定位架301右端面的中部固接有凸座302的左端,手柄303的左端固接有丝杠304,丝杠304的右端转动连接在凸座302右端的底部,丝杠304的左端转动连接在定位架301的中部,丝杠304上螺纹连接有移动架305的上端,条孔板306设有两个,两个条孔板306分别固接在移动架305下端的前后两端,移动架305的中部固接有双向推杆307的固定端,两个条孔板306内分别滑动连接有两个直角架308的上端,定位架301下端的前后两端分别滑动连接有两个按压弧309的右端,两个长杆107上分别滑动连接有定位架301上端的前后两端。
45.作进一步说明,使用时,根据医生的识别位置,带动定位架301在两个长杆107进行移动,随即握住手柄303带动丝杠304进行旋转,进而带动移动架305上的两个按压弧309向跟腱位置进行移动,医生手动控制该两个按压弧309的移动时,便于更加准确的进行位置固定以及手术缝合,结构简单操作方便。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。