1.本发明涉及光电扫描技术领域,尤其公开了一种基于坐标变换的虚拟瞄具实现方法及系统。
背景技术:
2.近几年来,光电瞄具在军事领域获得了日益广泛的应用。光电瞄具作为现代化轻武器精确打击目标的主体功能部件,其性能直接影响了武器的整体性能。目前,许多国家为了适应高科技现代化武器战争,提高国防实力。
3.瞄具是一种较为典型的光学系统,具体来讲,大部分瞄具都是望远系统,其技术指标必然包括传统的光学系统参数,如:焦距和精度,然而在现有光电瞄具不能直观地显示瞄准误差数据。
4.因此,现有光电瞄具不能直观地显示瞄准误差数据,是一件亟待解决的技术问题。
技术实现要素:
5.本发明提供了一种基于坐标变换的虚拟瞄具实现方法及系统,旨在解决现有光电瞄具不能直观地显示瞄准误差数据的技术问题。
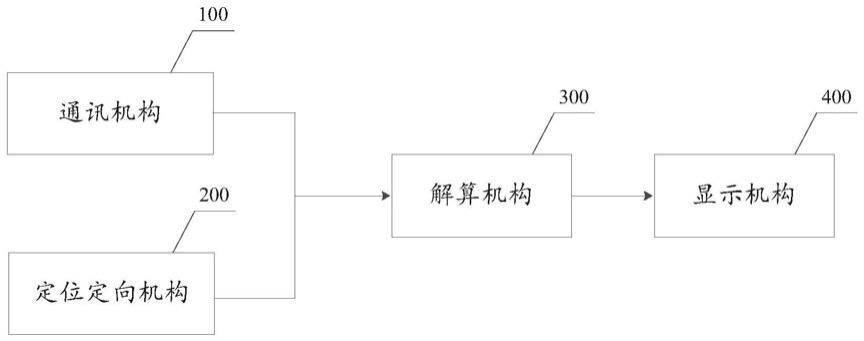
6.本发明的一方面涉及一种虚拟瞄具,包括通讯机构、定位定向机构、解算机构和显示机构,其中,
7.通讯机构,用于接收侦察防御系统广播过来的目标信息;
8.定位定向机构,用于采集武器系统本身的地理位置和武器瞄准线的方向;
9.解算机构分别与通讯机构和定位定向机构相连接,用于计算出目标与武器瞄准线的相对位置;
10.显示机构与解算机构相连接,用于根据解算机构计算出的目标与武器瞄准线的相对位置,直观地显示目标与武器瞄准线的偏差。
11.本发明的另一方面涉及一种基于坐标变换的虚拟瞄具实现方法,应用于上述的虚拟瞄具中,基于坐标变换的虚拟瞄具实现方法包括以下步骤:
12.设定目标控制跟踪坐标系:目标控制跟踪坐标系分为球坐标系和直角坐标系(x0,y0,z0);
13.确立观测坐标系:建立球坐标系与直角坐标系(x0,y0,z0)两者的交换关系;
14.确立作战终端直角坐标系:计算出作战终端相对观测坐标系的坐标δx,δy,δz;
15.导弹对准目标瞄准:以目标在终端坐标系的球坐标向量作为瞄准方向,通过移动终端的姿态角(α,β,γ)与目标向量求差值及(β
‑
θ
i
),驱动导弹对准目标,按非线性投影变换到移动终端的显示屏上,调整显示屏屏幕中心虚拟瞄具中的武器瞄准线来对准目标,完成目标导引跟踪。
16.进一步地,确立观测坐标系的步骤中,球坐标系与直角坐标系(x0,
y0,z0)的坐标交换为:
[0017][0018]
其中,表示红外搜索跟踪系统探测目标的方位角,以北向为基准,顺时针为正;θ0表示红外搜索跟踪系统探测目标的俯仰角,上为正;ρ0表示激光测距得到的目标斜距。
[0019]
进一步地,确立作战终端直角坐标系的步骤中,作战终端相对观测坐标系的坐标δx,δy,δz的计算式为:
[0020][0021]
其中,假设作战终端在n点,以作战终端北斗定位定向确定终端坐标原点,其原点在观测坐标系的坐标为(δx,δy,δz),建立终端直角坐标系(x
i
,y
i
,z
i
)。
[0022]
进一步地,确立作战终端直角坐标系的步骤中,目标在终端坐标系的直角坐标表达式为:
[0023][0024]
其中,坐标系的坐标为(δx,δy,δz),球坐标系为直角坐标系为(x0,y0,z0)。
[0025]
进一步地,确立作战终端直角坐标系的步骤中,目标在终端坐标系的球坐标表达式为:
[0026][0027]
其中,终端直角坐标系为(x
i
,y
i
,z
i
)。
[0028]
本发明的另一方面涉及一种基于坐标变换的虚拟瞄具实现系统,应用于上述的的虚拟瞄具中,基于坐标变换的虚拟瞄具实现系统包括:
[0029]
设定模块,用于设定目标控制跟踪坐标系:目标控制跟踪坐标系分为球坐标系和直角坐标系(x0,y0,z0);
[0030]
第一确立模块,用于确立观测坐标系:建立球坐标系与直角坐标系(x0,y0,z0)两者的交换关系;
[0031]
第二确立模块,用于确立作战终端直角坐标系:计算出作战终端相对观测坐标系的坐标δx,δy,δz;
[0032]
瞄准模块,用于导弹对准目标瞄准:以目标在终端坐标系的球坐标向量作为瞄准
方向,通过移动终端的姿态角(α,β,γ)与目标向量求差值及(β
‑
θ
i
),驱动导弹对准目标,按非线性投影变换到移动终端的显示屏上,调整显示屏屏幕中心虚拟瞄具中的武器瞄准线来对准目标,完成目标导引跟踪。
[0033]
进一步地,第一确立模块中,
[0034]
球坐标系与直角坐标系(x0,y0,z0)的坐标交换为:
[0035][0036]
其中,表示红外搜索跟踪系统探测目标的方位角,以北向为基准,顺时针为正;θ0表示红外搜索跟踪系统探测目标的俯仰角,上为正;ρ0表示激光测距得到的目标斜距。
[0037]
进一步地,第二确立模块中,作战终端相对观测坐标系的坐标δx,δy,δz的计算式为:
[0038][0039]
其中,假设作战终端在n点,以作战终端北斗定位定向确定终端坐标原点,其原点在观测坐标系的坐标为(δx,δy,δz),建立终端直角坐标系(x
i
,y
i
,z
i
)。
[0040]
进一步地,第二确立模块中,目标在终端坐标系的直角坐标表达式为:
[0041][0042]
其中,坐标系的坐标为(δx,δy,δz),球坐标系为直角坐标系为(x0,y0,z0);
[0043]
目标在终端坐标系的球坐标表达式为:
[0044][0045]
其中,终端直角坐标系为(x
i
,y
i
,z
i
)。
[0046]
本发明所取得的有益效果为:
[0047]
本发明提供的基于坐标变换的虚拟瞄具实现方法及系统,虚拟瞄具采用通讯机构、定位定向机构、解算机构和显示机构,通讯机构用于接收侦察防御系统广播过来的目标信息;定位定向机构用于采集武器系统本身的地理位置和武器瞄准线的方向;解算机构用于计算出目标与武器瞄准线的相对位置;显示机构用于根据解算机构计算出的目标与武器瞄准线的相对位置,直观地显示目标与武器瞄准线的偏差。本发明提供的基于坐标变换的虚拟瞄具实现方法及系统,将目标探测跟踪系统及作战终端约束在10km半径内,可忽略地
球曲率半径的影响;不严格追求测绘概念层面坐标变换的精度要求,以满足作战应用为目的,尽量简化数学变换,以工程可接受的误差限,实现处于近似平面内的观测系与作战终端的坐标变换,计算量小,坐标变换容易;采用直观地显示目标与武器瞄准线的偏差的显示形式,可提高射击精度,减小作战失误率。
附图说明
[0048]
图1为本发明提供的虚拟瞄具一实施例的功能模块框图;
[0049]
图2为本发明提供的虚拟瞄具一实施例的瞄准示意图;
[0050]
图3为本发明提供的基于坐标变换的虚拟瞄具实现方法一实施例的流程示意图;
[0051]
图4为本发明提供的基于坐标变换的虚拟瞄具实现方法中球坐标与直角坐标关系示意图;
[0052]
图5为本发明提供的基于坐标变换的虚拟瞄具实现方法中终端坐标系与观测坐标系示意图;
[0053]
图6为本发明提供的基于坐标变换的虚拟瞄具实现方法中终端坐标系目标坐标变换示意图;
[0054]
图7为本发明提供的基于坐标变换的虚拟瞄具实现系统一实施例的功能框图。
[0055]
附图标号说明:
[0056]
100、通讯机构;200、定位定向机构;300、解算机构;400、显示机构;10、设定模块;20、第一确立模块;30、第二确立模块;40、瞄准模块。
具体实施方式
[0057]
为了更好的理解上述技术方案,下面将结合说明书附图以及具体的实施方式对上述技术方案做详细的说明。
[0058]
如图1和图2所示,本发明第一实施例提出一种虚拟瞄具,包括通讯机构100、定位定向机构200、解算机构300和显示机构400,其中,通讯机构100,用于接收侦察防御系统广播过来的目标信息;定位定向机构200,用于采集武器系统本身的地理位置和武器瞄准线的方向;解算机构300分别与通讯机构100和定位定向机构200相连接,用于计算出目标与武器瞄准线的相对位置;显示机构400与解算机构300相连接,用于根据解算机构300计算出的目标与武器瞄准线的相对位置,直观地显示目标与武器瞄准线的偏差。在本实施例中,通讯机构100、定位定向机构20和显示机构400采用现有的功能模块,例如,通讯机构100采用现有的无线通信模块,如5g或wifi模块。定位定向机构200采用现有的定位定向模块,如gps或北斗定位模块。显示机构400采用现有的lcd显示器或led显示器。本实施例提供的虚拟瞄具,将目标探测跟踪系统及作战终端约束在10km半径内,可忽略地球曲率半径的影响;不严格追求测绘概念层面坐标变换的精度要求,以满足作战应用为目的,尽量简化数学变换,以工程可接受的误差限,实现处于近似平面内的观测系与作战终端的坐标变换,计算量小,坐标变换容易;采用直观地显示目标与武器瞄准线的偏差的显示形式,可提高射击精度,减小作战失误率。
[0059]
请见图1和图2,本实施例提供的一种虚拟瞄具,其工作原理为:
[0060]
显示机构400中显示屏的中心十字架代表武器瞄准线,x轴表示目标距离瞄准线的
方位角,y轴表示俯仰角,当目标在x轴的正向表示目标在瞄准线的右边,需要将武器瞄准设备右转,反之则将武器瞄准设备左转;当目标在y轴的正向表示目标在瞄准线的上方,需要将武器瞄准设备上转,反之则将武器瞄准设备下转。显示屏上的十字线上标有刻度,可以粗略估计目标距离瞄准线的方位角与俯仰角,显示屏上的实心圆内表示武器装备瞄准的有效范围,在此范围内目标与圆点的距离与其方位角及俯仰角成正比。而实心圆之外只是定性地表示目标在哪个方向,需要怎么样地转动才能靠近目标,将其移到有效范围内。在屏幕的右边有目标空间坐标信息的定量表示,包括方位角的数值,俯仰角的数值以及距离武器装备的距离。
[0061]
请见图3,图3为本发明提供的基于坐标变换的虚拟瞄具实现方法一实施例的流程示意图,在本实施例中,该基于坐标变换的虚拟瞄具实现方法应用于上述的虚拟瞄具中,包括以下步骤:
[0062]
步骤s100、设定目标控制跟踪坐标系:目标控制跟踪坐标系分为球坐标系和直角坐标系(x0,y0,z0)。
[0063]
设定目标探测跟踪坐标系为:球坐标系(φ0,θ0,ρ0),直角坐标系为(x0,y0,z0)。
[0064]
其中,φ0代表红外搜索跟踪系统探测目标的方位角,以北向为基准,顺时针为正;θ0代表红外搜索跟踪系统探测目标的俯仰角,上为正;ρ0代表激光测距得到的目标斜距。
[0065]
步骤s200、确立观测坐标系:建立球坐标系与直角坐标系(x0,y0,z0)两者的交换关系。
[0066]
以北斗或gps定位定向系统的经纬坐标、高程及北向基准建立东北天坐标系。球坐标及直角坐标变换关系如图4所示,变换关系式如公式(1)所示。
[0067]
假设红外搜索跟踪系统在原点o,目标位置在m点,则坐标变换为:
[0068][0069]
公式(1)中,表示红外搜索跟踪系统探测目标的方位角,以北向为基准,顺时针为正;θ0表示红外搜索跟踪系统探测目标的俯仰角,上为正;ρ0表示激光测距得到的目标斜距。
[0070]
步骤s300、确立作战终端直角坐标系:计算出作战终端相对观测坐标系的坐标δx,δy,δz。
[0071]
作战终端相对观测坐标系的坐标δx,δy,δz的计算:
[0072][0073]
假设作战终端在n点,以作战终端北斗定位定向确定终端坐标原点,其原点在观测坐标系的坐标为(δx,δy,δz),建立终端直角坐标系(x
i
,y
i
,z
i
),进行平面投影变换如图5所示。
[0074]
请见图6,目标在终端坐标系的直角坐标表达式为公式(3):
[0075][0076]
公式(3)中,坐标系的坐标为(δx,δy,δz),球坐标系为直角坐标系为(x0,y0,z0)。
[0077]
目标在终端坐标系的球坐标表达式为公式(4):
[0078][0079]
公式(4)中,终端直角坐标系为(xi,yi,zi)。
[0080]
可以根据终端经纬度及海拔信息,依据公式(3)及公式(4)求得目标m点在终端n点坐标系(作战坐标系)中的位置,再将其转换为球坐标表达。
[0081]
步骤s400、导弹对准目标瞄准:以目标在终端坐标系的球坐标向量作为瞄准方向,通过移动终端的姿态角(α,β,γ)与目标向量求差值及(β
‑
θ
i
),驱动导弹对准目标,按非线性投影变换到移动终端的显示屏上,调整显示屏屏幕中心虚拟瞄具中的武器瞄准线来对准目标,完成目标导引跟踪。
[0082]
以东北天坐标系为惯性坐标基准,以北向为参考方向定义航向角。以目标在终端坐标系的球坐标向量作为瞄准方向,通过手机的姿态角(α,β,γ)与目标向量求差值及(β
‑
θ
i
)驱动导弹对准目标,按非线性投影变换到手机显示屏幕上,内圈圆角度差2
°
以内线性变换,中圈按照2
°
~90
°
缩比投影为2
°
~4
°
区间,外围对应90
°
~180
°
区间。调整手机使屏幕中心“十”字瞄准线最终对准目标,完成目标导引跟踪。
[0083]
本实施例提供的基于坐标变换的虚拟瞄具实现方法,同现有技术相比,通过设定目标控制跟踪坐标系:目标控制跟踪坐标系分为球坐标系和直角坐标系(x0,y0,z0);确立观测坐标系:建立球坐标系与直角坐标系(x0,y0,z0)两者的交换关系;确立作战终端直角坐标系:计算出作战终端相对观测坐标系的坐标δx,δy,δz;导弹对准目标瞄准:以目标在终端坐标系的球坐标向量作为瞄准方向,通过移动终端的姿态角(α,β,γ)与目标向量求差值及(β
‑
θ
i
),驱动导弹对准目标,按非线性投影变换到移动终端的显示屏上,调整显示屏屏幕中心虚拟瞄具中的武器瞄准线来对准目标,完成目标导引跟踪。本实施例提供的基于坐标变换的虚拟瞄具实现方法,将目标探测跟踪系统及作战终端约束在10km半径内,可忽略地球曲率半径的影响;不严格追求测绘概念层面坐标变换的精度要求,以满足作战应用为目的,尽量简化数学变换,以工程可接受的误差限,实现处于近似平面内的观测系与作战终端的坐标变换,计算量小,坐标变换容易;采用直观地显示目标与武器瞄准线的偏差的显示形式,可提高射击精度,减小作战失误率。
[0084]
进一步地,请见图7,图7为本发明提供的基于坐标变换的虚拟瞄具实现系统一实施例的功能框图,在本实施例中,基于坐标变换的虚拟瞄具实现系统应用于上述的的虚拟瞄具中,该基于坐标变换的虚拟瞄具实现系统包括设定模块10、第一确立模块20、第二确立模块30和瞄准模块40,其中,设定模块10,用于设定目标控制跟踪坐标系:目标控制跟踪坐
标系分为球坐标系和直角坐标系(x0,y0,z0);第一确立模块20,用于确立观测坐标系:建立球坐标系与直角坐标系(x0,y0,z0)两者的交换关系;第二确立模块30,用于确立作战终端直角坐标系:计算出作战终端相对观测坐标系的坐标δx,δy,δz;瞄准模块40,用于导弹对准目标瞄准:以目标在终端坐标系的球坐标向量作为瞄准方向,通过移动终端的姿态角(α,β,γ)与目标向量求差值及(β
‑
θ
i
),驱动导弹对准目标,按非线性投影变换到移动终端的显示屏上,调整显示屏屏幕中心虚拟瞄具中的武器瞄准线来对准目标,完成目标导引跟踪。
[0085]
设定模块10设定目标探测跟踪坐标系为:球坐标系(φ0,θ0,ρ0),直角坐标系为(x0,y0,z0)。
[0086]
其中,φ0代表红外搜索跟踪系统探测目标的方位角,以北向为基准,顺时针为正;θ0代表红外搜索跟踪系统探测目标的俯仰角,上为正;ρ0代表激光测距得到的目标斜距。
[0087]
第一确立模块20以北斗或gps定位定向系统的经纬坐标、高程及北向基准建立东北天坐标系。球坐标及直角坐标变换关系如图4所示,变换关系式如公式(1)所示。
[0088]
假设红外搜索跟踪系统在原点o,目标位置在m点,则坐标变换为:
[0089][0090]
公式(5)中,表示红外搜索跟踪系统探测目标的方位角,以北向为基准,顺时针为正;θ0表示红外搜索跟踪系统探测目标的俯仰角,上为正;ρ0表示激光测距得到的目标斜距。
[0091]
第二确立模块30确立作战终端直角坐标系,计算出作战终端相对观测坐标系的坐标δx,δy,δz:
[0092][0093]
假设作战终端在n点,以作战终端北斗定位定向确定终端坐标原点,其原点在观测坐标系的坐标为(δx,δy,δz),建立终端直角坐标系(x
i
,y
i
,z
i
),进行平面投影变换如图5所示。
[0094]
请见图6,目标在终端坐标系的直角坐标表达式为公式(7):
[0095][0096]
公式(7)中,坐标系的坐标为(δx,δy,δz),球坐标系为直角坐标系为(x0,y0,z0)。
[0097]
目标在终端坐标系的球坐标表达式为公式(8):
[0098][0099]
公式(8)中,终端直角坐标系为(xi,yi,zi)。
[0100]
可以根据终端经纬度及海拔信息,依据公式(3)及公式(4)求得目标m点在终端n点坐标系(作战坐标系)中的位置,再将其转换为球坐标表达。
[0101]
瞄准模块40以东北天坐标系为惯性坐标基准,以北向为参考方向定义航向角。以目标在终端坐标系的球坐标向量作为瞄准方向,通过手机的姿态角(α,β,γ)与目标向量求差值及(β
‑
θ
i
)驱动导弹对准目标,按非线性投影变换到手机显示屏幕上,内圈圆角度差2
°
以内线性变换,中圈按照2
°
~90
°
缩比投影为2
°
~4
°
区间,外围对应90
°
~180
°
区间。调整手机使屏幕中心“十”字瞄准线最终对准目标,完成目标导引跟踪。
[0102]
本实施例提供的基于坐标变换的虚拟瞄具实现系统,同现有技术相比,通过设定目标控制跟踪坐标系:目标控制跟踪坐标系分为球坐标系和直角坐标系(x0,y0,z0);确立观测坐标系:建立球坐标系与直角坐标系(x0,y0,z0)两者的交换关系;确立作战终端直角坐标系:计算出作战终端相对观测坐标系的坐标δx,δy,δz;导弹对准目标瞄准:以目标在终端坐标系的球坐标向量作为瞄准方向,通过移动终端的姿态角(α,β,γ)与目标向量求差值及(β
‑
θ
i
),驱动导弹对准目标,按非线性投影变换到移动终端的显示屏上,调整显示屏屏幕中心虚拟瞄具中的武器瞄准线来对准目标,完成目标导引跟踪。本实施例提供的基于坐标变换的虚拟瞄具实现系统,将目标探测跟踪系统及作战终端约束在10km半径内,可忽略地球曲率半径的影响;不严格追求测绘概念层面坐标变换的精度要求,以满足作战应用为目的,尽量简化数学变换,以工程可接受的误差限,实现处于近似平面内的观测系与作战终端的坐标变换,计算量小,坐标变换容易;采用直观地显示目标与武器瞄准线的偏差的显示形式,可提高射击精度,减小作战失误率。
[0103]
尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和修改。显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

