1.本发明属于纤维复合材料领域,尤其是涉及一种多自由度耦合连续纤维增强异质多材料原位增材制造平台。
背景技术:
2.纤维具有高比强度、高比模量,耐高温等优点,尤其是以连续碳纤维增强塑料为代表的复合材料,已经广泛应用于航空航天,交通运输,压力容器、体育用品以及其他高端制造领域。
3.在碳纤维增强树脂复合材料中,主要分为短碳纤维增强和连续纤维增强两大部分,其中短纤维增强的复合材料打印的样件表面精度更高,但其机械性能提升并不明显,与此不同的是,连续纤维增强的复合材料的机械性能更优,其主要取决于复合材料中纤维的体积分数。但目前连续碳纤维增强树脂以单种树脂和碳纤维复合的研究较多,但是连续碳纤维与多种树脂材料的复合较少出现。
4.如公开号为cn105348768a的中国专利文献公开了一种碳纤维增强热塑性树脂复合材料的制造方法,首先将碳纤维表面上浆剂的去除,再进行镀金属处理,水洗、表面热处理后以开纤状态导入到含有熔融热塑性树脂的浸渍模头中,使热塑性树脂熔融包覆在碳纤维表面,再经过冷却、切粒后,制成碳纤维增强热塑性树脂复合材料。
5.另一方面,目前的3d打印系统主要以3自由度打印系统为主,并没有实现真正意义上的3d打印,其中的3d打印平台主要为3d打印提供支撑、加热等功能,目前3d打印平台主要以固定平台和单轴旋转平台为主。
6.如公开号为cn107856298a的中国专利文献公开了一种连续纤维增强复合材料回转式3d打印机,包括复合材料打印头,复合材料打印头安装在移动导轨上,复合材料打印头和调节装置配合,移动导轨装在移动装置上,复合材料打印头下方设有工作台,工作台上面装有旋转装置,旋转装置上安装有支撑,工作台和升降装置连接,工作台的左右放置增强纤维的纤维筒和树脂丝材的料盘,增强纤维经过张紧装置进入复合材料打印头,树脂丝材通过送丝装置、导丝管进入复合材料打印头中。
7.为了进一步满足高自由度的3d打印需求,例如变姿态打印,梯度打印和力学驱动的打印等,需要设计一种多自由度耦合连续纤维增强异质多材料原位增材制造平台。
技术实现要素:
8.本发明提供了一种多自由度耦合连续纤维增强异质多材料原位增材制造平台,不仅可以实现连续碳纤维与多种树脂材料的复合打印,同时可以实现高自由度的3d打印需求,例如变姿态打印,梯度打印和力学驱动的打印等。
9.一种多自由度耦合连续纤维增强异质多材料原位增材制造平台,包括:四轴运动平台、龙门式运动系统以及纤维增强的多材料打印头;
10.所述的龙门式运动系统包括固定底座,所述的固定底座上设有两根相互平行的滑
轨,两根滑轨上均滑动设有支撑立柱,两个支撑立柱之间连接有横杆,所述的横杆上滑动套设有滑套,且滑套的前侧侧壁设有竖向的凹槽,且凹槽上设有可沿凹槽上下滑动的滑块,所述滑块的下端面与多材料打印头固定;所述滑块在靠近下端面的侧壁设有用于控制多材料打印头的控制板;
11.所述的多材料打印头包括:上连接板、与上连接板通过固定柱连接的下连接板、设置在上连接板和下连接板之间的四个树脂料盘和一个纤维料盘、与下连接板下端面固定的喷嘴;所述喷嘴的进料端设有分别与四个树脂料盘和一个纤维料盘对应的五个进料口,所述上连接板的上端面与滑块的下端面固定。
12.进一步地,所述喷嘴的进料端设有一个纤维进料口和四个树脂进料口;其中,纤维进料口位于中心,四个树脂进料口均匀布置在纤维进料口的四周,与纤维进料口的间距为15~25mm;
13.喷嘴在纤维进料口和树脂进料口之间的位置设有加热模块和温控模块;所述的加热模块和温控模块均与控制板电连接;
14.所述喷嘴的出料端设有一个纤维出料口和四个树脂出料口,四个树脂出料口均匀布置在纤维出料口的四周,与纤维出料口的间距为0.2~2.5mm。
15.进一步地,所述下连接板的下端面固定有四个挤出电机,四个挤出电机的输入端分别与四个树脂料盘一一对应,四个挤出电机的输出端分别与喷嘴的四个树脂进料口连接;四个挤出电机与控制板电连接。
16.进一步地,所述的上连接板与下连接板之间至少设有两根固定柱,所述的下连接板上还设有至少一根竖杆;所述的固定柱和竖杆上均设有水平支撑杆,所述的树脂料盘和纤维料盘可转动的套设在对应的水平支撑杆上。
17.优选地,所述的多材料打印头上设有多路冷却系统,所述的多路冷却系统包括:多路分气块、气泵、减压阀以及若干冷却管;
18.所述的多路分气块固定在固定柱上,所述多路分气块的进气端通过带减压阀的气管与气泵连接,所述多路分气块的出气端与若干冷却管固定连接,所述的若干冷却管的末端出气孔分别对应控制板和四个挤出电机。
19.进一步地,所述的四轴运动平台包括两个平行设置在支撑框架上端的x轴导轨,两个x轴导轨上设有可沿x轴方向运动的y轴导轨,所述的y轴导轨上设有可沿y轴方向运动的y轴滑块,所述的y轴滑块上设有可沿z轴方向运动的z轴机构,所述z轴机构的上端固定有旋转电机,所述旋转电机的输出端通过减速模块与打印平台的下端面固定。
20.进一步地,所述的x轴导轨包括x轴电机以及与y轴导轨螺纹连接的x轴丝杆,通过x轴电机驱动x轴丝杆转动来带动y轴导轨沿x轴方向运动;
21.所述的y轴导轨包括y轴电机以及与y轴滑块螺纹连接的y轴丝杆,通过y轴电机驱动y轴丝杆转动来带动y轴滑块沿y轴方向运动;
22.所述的z轴机构包括z轴电机以及与y轴滑块螺纹连接的z轴丝杆,通过z轴电机驱动z轴丝杆转动来带动整个z轴机构沿z轴方向运动。
23.为了使z轴机构沿z轴方向运动是更加稳定,优选地,所述的z轴机构包含两个z轴电机和两根z轴丝杆,y轴导轨的两侧均设有一个z 轴电机和对应的z轴丝杆,两个z轴电机同步工作,同时驱动整个z轴机构的运动。
24.可选择地,所述的四个树脂料盘内装填的材料包括但不限于聚乳酸、丙烯腈丁二烯苯乙烯、聚氨酯、聚酰胺、聚碳酸酯、聚醚醚酮和聚亚苯基砜树脂等。
25.可选择地,所述的纤维料盘内装填的材料包括但不限于碳纤维、玻璃纤维、凯夫拉纤维和玄武岩纤维等。
26.与现有技术相比,本发明具有以下有益效果:
27.1、本发明中,喷嘴配合四个树脂料盘和一个纤维料盘,可同时实现树脂材料的四进四出以及连续纤维的进出;喷嘴上的加热模块和温控模块可以将树脂材料加热到指定温度,更好的与连续纤维复合;多路冷却系统可同时输出压缩气体对挤出电机和控制板进行冷却。
28.3、本发明中,四轴运动平台通过三个直线运动导轨形成空间x、y、z的平移运动和旋转平台的旋转运动,旋转平台可以承受垂直于旋转平台的力和力矩;x、y、z方向的平移运动和旋转运动可以相互独立运动,也可以进行插补运动。同时,龙门式运动系统也可以使多材料打印头实现 x、y、z三个方向的运动,与四轴运动平台平台配合,可以实现复杂的高自由度的3d打印需求,例如变姿态打印,梯度打印和力学驱动的打印等。
附图说明
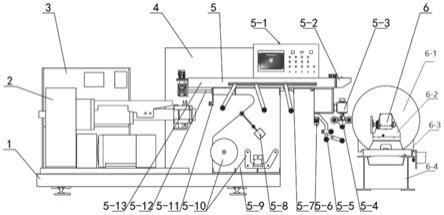
29.图1为本发明一种多自由度耦合连续纤维增强异质多材料原位增材制造平台的整体结构示意图;
30.图2为本发明中龙门式运动系统的结构示意图;
31.图3为本发明中多材料打印头的结构示意图;
32.图4为本发明中喷嘴的结构示意图;
33.图5为本发明中喷嘴的出料端示意图;
34.图6为多路冷却系统的结构示意图;
35.图7为多路冷却系统安装在多材料打印头上的结构示意图;
36.图8为本发明中四轴运动平台的结构示意图;
37.图9为本发明中四轴打印平台和支撑框架的总装示意图;
38.图10为四轴运动平台中x轴导轨和y轴导轨配合的示意图;
39.图11为四轴运动平台中x轴导轨和y轴导轨配合的另一角度示意图;
40.图12为四轴运动平台中z轴机构的示意图;
41.图13为四轴运动平台中z轴机构的另一角度示意图。
具体实施方式
42.下面结合附图和实施例对本发明做进一步详细描述,需要指出的是,以下所述实施例旨在便于对本发明的理解,而对其不起任何限定作用。
43.如图1所示,一种多自由度耦合连续纤维增强异质多材料原位增材制造平台,主要由支撑框架1、四轴运动平台2、纤维增强的多材料打印头3 和龙门式运动系统4组成。
44.如图2所示,龙门式运动系统4包括固定底座401,固定底座401上设有两根相互平行的滑轨402,两根滑轨402上均滑动设有支撑立柱403,两个支撑立柱403之间连接有横杆404,横杆404上滑动套设有滑套405,且滑套405的前侧侧壁设有竖向的凹槽,凹槽上设有可
沿凹槽上下滑动的滑块406。
45.如图1和2所示,滑块406的下端面与多材料打印头3固定,滑块406 在靠近下端面的侧壁设有用于控制多材料打印头的控制板5。
46.如图3所示,多材料打印头3主要包括上连接板311、下连接板312、树脂料盘313、纤维料盘314、固定柱304、挤出电机一305、挤出电机二 306、喷嘴307、挤出电机三308和挤出电机四309。
47.上连接板311与下连接板312通过固定柱304连接,上连接板311和下连接板312之间的设有四个树脂料盘313和一个纤维料盘314。具体的,上连接板311与下连接板312之间至少设有两根固定柱304,下连接板312 上还设有至少一根竖杆316。固定柱304和竖杆316上均设有水平支撑杆,树脂料盘313和纤维料盘314可转动的套设在对应的水平支撑杆上。本实施例中,纤维料盘314设置在四个树脂料盘313的中间位置。
48.如图4所示,喷嘴307的进料端设有一个纤维进料口41和四个树脂进料口42;其中,纤维进料口41位于中心,四个树脂进料口42均匀布置在纤维进料口41的四周,靠近喷嘴进料端的边缘,与纤维进料口的间距为15~25mm。喷嘴307在纤维进料口41和树脂进料口42之间的位置设有三个加热模块安装孔43和一个温控模块安装孔44,用于安装加热模块和温控模块。
49.如图5所示,喷嘴307的出料端设有一个纤维出料口45和四个树脂出料口46,四个树脂出料口46均匀布置在纤维出料口45的四周,与纤维出料口45的间距为0.2~2.5mm。
50.挤出电机一305、挤出电机二306、挤出电机三308和挤出电机四309 固定在下连接板312的下端面,四个挤出电机的输入端分别与四个树脂料盘313一一对应,四个挤出电机的输出端分别与喷嘴307的四个树脂进料口42连接。
51.如图6和图7所示,多路冷却系统主要由多路分气块605、冷却管一 601、冷却管二602、冷却管三603、冷却管四604、冷却管五606、冷却管六607、气管接头608、气管一609、减压阀610、气管二611和气泵612 组成。
52.气泵612与气管二611固定连接,气管二611与减压阀610固定连接,减压阀610与气管一609固定连接,气管一609与气管连接件608固定连接,冷却管一601、冷却管二602、冷却管三603、冷却管四604、冷却管五606、冷却管六607分别与多路冷却块605固定连接。
53.多路冷却系统冷却原理为:气泵612产生压缩空气,经由气管二611 到达减压阀610,通过减压阀610调节气体压强,之后压缩空气通过气管一609到达多路分气块605,在多路分气块605中分别从冷却管一601、冷却管二602、冷却管三603、冷却管四604、冷却管五606、冷却管六607 流出。其中冷却管一601、冷却管四604、冷却管二602和冷却管三603 分别对挤出电机四309、挤出电机三308、挤出电机二306和挤出电机一 305散热。冷却管五606和冷却管六607对控制板4散热。
54.如图8和图9所示,四轴运动平台2包括两个平行设置在支撑框架上端的x轴导轨21,两个x轴导轨21上设有可沿x轴方向运动的y轴导轨22,y轴导轨22上设有可沿y轴方向运动的y轴滑块23,所述的y 轴滑块23上设有可沿z轴方向运动的z轴机构24,z轴机构24的上端固定有旋转电机233,旋转电机233的输出端通过减速模块232与打印平台259的下端面固定。
55.如图10和图11所示,y轴导轨22可滑动的设置在两个x轴导轨21 上。具体包括:滑
块一201,滑块二202,丝杆一203(即y轴丝杆),直线导轨一204,锁紧环一205,轴端挡板一206,锁紧环二207,型材一208, 电机一209(即y轴电机),电机座210,侧边挡板一211,直线轴承一212, 直线轴承二213,光杆一214,轴端挡板二215,电机二216(即x轴电机),丝杆二217(即x轴丝杆),光杆二218,型材二219,直线导轨二220,联轴器一221,锁紧环三222,联轴器二223,锁紧环四224,锁紧环五 225,轴端挡板三226,侧边挡板三227,直线轴承三228,丝杆螺母一229, 直线轴承四230,轴端挡板四231。
56.x轴导轨21中部件连接关系为:轴端挡板一206与型材一208固定连接,轴端挡板二215与型材一208固定连接。光杆二218通过锁紧环一 205和锁紧环四224分别固定在轴端挡板一206和型材一208上,光杆一 214通过锁紧环二207和锁紧环三222分别固定在轴端挡板一206和型材一208上。丝杆二217(即x轴丝杆)与联轴器二223固定连接,联轴器二223与电机二216(即x轴电机)固定连接,轴端挡板四231与轴端挡板一206固定连接,丝杆二217与轴端挡板四231之间可以滚动。直线轴承一212与光杆一214滑动接触,直线轴承二213与光杆二218滑动接触,直线轴承四230与光杆一214滑动接触,直线轴承三228与光杆二218滑动接触,丝杆螺母一229与丝杆二217之间滑动螺旋连接。
57.x轴运动原理为:电机二216旋转,通过联轴器二223将动力传递到丝杆二217上,通过丝杆二217和丝杆螺母一229的滑动螺旋运动从而带动侧边挡板三227和型材二219运动,至此完成x轴的运动。
58.y轴导轨22中的部件连接关系为:直线轴承二213与侧边挡板一211 固定连接,直线轴承一212与侧边挡板一211固定连接,侧边挡板一211 与型材二219固定连接。直线轴承三228与侧边挡板三227固定连接,直线轴承四230与侧边挡板三227固定连接,侧边挡板三227与型材二219 固定连接。电机一209(即y轴电机)与联轴器一221固定连接,联轴器一221与丝杆一203固定连接,锁紧环五225与轴端挡板三226固定连接,丝杆一203(即y轴丝杆)与锁紧环五225滚动接触。丝杆一203和丝杆螺母三248滑动螺旋连接,丝杆一203和丝杆螺母四252滑动螺旋连接。滑块一201和滑块二202分别与连接板一241固定连接。直线导轨一204 与滑块一201滑动接触,滑块二202与直线导轨二220滑动接触。电机一 209与电机座210固定连接。
59.y轴运动原理为:电机一209旋转,通过联轴器一221将动力传递到丝杆一203上,通过丝杆一203和丝杆螺母三248,丝杆一203和丝杆螺母四252的滑动螺旋运动从而带动连接板一241和连接板五250运动,至此完成y轴的运动。
60.如图12和13所示,z轴机构24包括:减速模块232,电机三233(即旋转电机),型材三234,光杆三235,丝杆三236(即z轴丝杆),光杆四237,直线轴承五238,直线轴承六239,丝杆螺母二240,连接板一 241,锁紧环六242,联轴器三243,锁紧环七244,电机四245(即z轴电机),连接板二246,连接板三247,丝杆螺母三248,连接板四249,连接板五250,连接板六251,丝杆螺母四252,锁紧环八253,锁紧环九 254,锁紧环十255,连接板七256,连接板八257,连接板九258,打印平台259
61.z轴机构24的部件连接关系为:连接板二246和连接板七256分别与型材三234固定连接,锁紧环六242和锁紧环七244分别与连接板二246 固定连接,锁紧环八253,锁紧环九254和锁紧环十255分别与连接板七 256固定连接。锁紧环六242和锁紧环八253分别与光杆四237固定连接,锁紧环七244和锁紧环十255分别与光杆三235固定连接。电机四245和丝杆
三236分别与联轴器三243固定连接。直线轴承五238,直线轴承六 239和丝杆螺母二240分别与连接板一241固定连接,连接板一241与连接板五250固定连接,丝杆螺母四252与连接板六251固定连接,连接板六251与连接板五250固定连接,连接板五250与连接板四249固定连接,连接板四249与丝杆螺母三248固定连接。连接板七256和连接板九258 分别与连接板八257固定接触。光杆四237与直线轴承六239滑动接触,光杆三235与直线轴承五238滑动接触,光杆三235和丝杆螺母二240滑动螺旋连接。连接板二246和连接板三247固定连接。
62.z轴运动原理:电机四245旋转,通过联轴器三243将动力传递到丝杆三236上,通过丝杆三236和丝杆螺母二240的滑动螺旋运动从而带动连接板一241和连接板五250运动,至此完成z轴的运动。
63.本发明中,通过电机三233旋转带动减速模块232旋转,从而带动打印平台259旋转,实现r轴的旋转。
64.以上所述的实施例对本发明的技术方案和有益效果进行了详细说明,应理解的是以上所述仅为本发明的具体实施例,并不用于限制本发明,凡在本发明的原则范围内所做的任何修改、补充和等同替换,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。