技术特征:
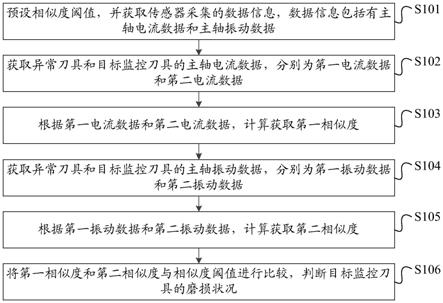
1.一种无人机数据采集控制方法,其特征在于,所述方法包括:控制多个无人机从多视角对目标物体的一个剖面的所有方位进行包围;控制所述多个无人机沿所述目标物体进行同步采集,得到所述所有方位的全息数据。2.根据权利要求1所述方法,其特征在于,所述目标物体为杆状目标,所述控制多个无人机从多视角对目标物体的一个剖面的所有方位进行包围,包括:控制所述多个无人机分别在目标水平方向的多个时钟方向的位置对所述目标物体进行包围;所述控制所述多个无人机沿所述目标物体进行同步采集,包括:控制所述多个无人机从垂直于所述目标水平方向的方向上对所述目标物体进行同步采集。3.根据权利要求1所述方法,其特征在于,所述目标物体为线状目标,所述控制多个无人机从多视角对目标物体的一个剖面的所有方位进行包围,包括:控制所述多个无人机分别在目标纵轴方向的多个时钟方向的位置对所述目标物体进行包围;所述控制所述多个无人机沿所述目标物体进行同步采集,包括:控制所述多个无人机顺着所述目标纵轴方向上对所述目标物体进行同步拍摄。4.根据权利要求1
‑
3任一项所述方法,其特征在于,所述多个无人机组合形成对所述目标物体的所述剖面的360
°
视角;所述多个无人机中每个无人机拍摄的图像与其他无人机拍摄的图像存在重叠图像,且所述重叠图像与一个无人机拍摄的图像的占比大于预设数值。5.根据权利要求4所述方法,其特征在于,所述方法还包括:获取所述目标物体的外观尺寸;根据所述外观尺寸确定所述多个无人机进行扫描的协同作业平面的平面参数;根据所述平面参数确定所述多个无人机分别在目标纵轴方向的多个时钟方向的位置;其中,所述多个无人机分别在目标纵轴方向的多个时钟方向的位置时,所述多个无人机分别与所述目标物体之间的距离均大于或等于预设距离。6.根据权利要求1所述方法,其特征在于,所述方法还包括:对采集的所述全息数据进行备份;与地面控制站进行通信连接;将所述全息数据发送至所述地面控制站。7.根据权利要求1或6所述方法,其特征在于,所述方法还包括:获取所述目标物体所处环境的地理信息系统信息;根据所述地理信息系统信息规划所述多个无人机的作业路线和航飞参数;根据所述作业路线和所述航飞参数执行所述控制多个无人机从多视角对目标物体的一个剖面的所有方位进行包围;控制所述多个无人机沿所述目标物体进行扫描,得到所述所有方位的全息数据的操作。8.一种无人机,其特征在于,所述无人机属于多个无人机中的任一无人机,其中,所述无人机用于:控制所述多个无人机从多视角对目标物体的一个剖面的所有方位进行包围;控制所述多个无人机沿所述目标物体进行同步采集,得到所述所有方位的全息数据。
9.根据权利要求7所述装置,其特征在于,所述无人机与地面控制站进行通信连接,所述无人机还用于:对采集的所述全息数据进行备份;与地面控制站进行通信连接;将所述全息数据发送至所述地面控制站。10.一种计算机可读存储介质,其特征在于,其存储用于电子数据交换的计算机程序,其中,所述计算机程序使得计算机执行如权利要求1至7任意一项所述的方法。
技术总结
本发明公开了一种无人机数据采集控制方法、无人机及存储介质,通过控制多个无人机从多视角对目标物体的一个剖面的所有方位进行包围;控制所述多个无人机沿所述目标物体进行同步采集,得到所述所有方位的全息数据,能够通过多无人机协同对目标物体进行同步数据采集,从而得到目标物体全方位的全息数据,从而提高无人机数据采集的效率,能够完整、不留死角地采集到目标物体的全方位数据。角地采集到目标物体的全方位数据。角地采集到目标物体的全方位数据。
技术研发人员:张颖豪 张逸明
受保护的技术使用者:人民中科(济南)智能技术有限公司
技术研发日:2021.08.06
技术公布日:2021/11/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。