1.以下内容总体上涉及可以提供增加的上下文感知、安全和安全性的超宽带感测系统和方法。
背景技术:
2.对于汽车应用而言,无钥匙进入系统提供了远程访问,从而允许有用户远程锁定或解锁车门的能力。例如,钥匙挂扣包括用于锁定/解锁车门的按钮。最近,汽车制造商已经开始引入所谓的无源无钥匙系统。无源无钥匙系统可能不需要按下按钮来锁定/解锁车门。无源无钥匙系统也可能不需要物理钥匙来启动车辆。取而代之,当钥匙挂扣靠近车辆或在车辆内定位时,无源无钥匙系统可以允许执行这种动作。
技术实现要素:
3.在一个实施例中,公开了一种用于确定特定车辆状态的系统和方法,其可以包括:(1)确定用户在车辆内所位于的位置;或者(2)车辆座椅、车窗或门的位置,即门或窗是否打开/关闭。确定车辆状态可以包括:在多个接收节点处接收uwb信号。可以根据从所述多个接收节点接收到的uwb信号来计算多个信道脉冲响应(cir)。可以从所述多个cir中提取基于所选位置和幅度的多个基于峰值的特征。可以通过将所述多个cir与涉及多个车辆状态的参考cir的语料库进行相关来生成多个基于相关性的特征。可以通过将所述多个cir与涉及所述多个车辆状态的参考cir的语料库进行相关来生成多个最大似然车辆矩阵。所述多个最大似然车辆矩阵可以被求和以生成前k车辆状态矩阵。然后,可以通过在所述前k车辆状态矩阵内使用机器学习分类算法来处理所述多个基于峰值的特征和基于相关性的特征从而确定车辆状态。
4.所公开的系统和方法可以进一步包括使用快速傅立叶变换(fft)算法来对所述多个cir进行上采样。fft算法可以在所述多个cir的时域上操作。第一路径也可以被标识为发生在所述多个cir中的事件。还设想的是,所述系统和方法可以包括机器学习过程,所述机器学习过程包括训练阶段和测试阶段,以用于生成用于确定车辆状态的车辆矩阵和算法。也可以在包括训练阶段和测试阶段的机器学习过程期间生成最大似然车辆矩阵。
5.还设想的是,所公开的系统和方法可以基于以下各项来确定一个或多个基于峰值的特征:(1)所述多个cir中的第一峰值的功率比;(2)所述多个cir的顶部峰值的功率比;(3)所述多个cir的第一峰值之间的相对抽头(tap)距离;(4)所述多个cir的顶部峰值之间的相对抽头距离;(5)所述多个cir的最大峰值功率;以及(6)所述多个cir的最大峰值功率的位置。
附图说明
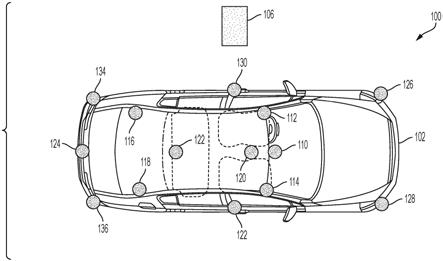
6.图1是定位在车辆内的超宽带感测(uwb)系统的说明性示例;图2是由uwb系统接收到的信道脉冲响应(cir)信号的说明性示例;
图3是uwb信号的说明性示例;图4a是校准过程期间的uwb系统的说明性操作框图;图4b是运行时过程期间的uwb系统的说明性操作框图;图5a是示出了由uwb系统内的节点进行的传送和接收连接性的说明性矩阵;图5b是示出了uwb系统内的节点的接收信号强度的说明性矩阵;图6是原始cir和上采样cir的说明性示例;图7a是在uwb系统内的节点处接收到的五个cir的说明性示例;图7b是已经通过uwb系统所对准的五个cir的说明性示例;图8是示出了由uwb系统内的某些节点接收到的cir的相关性的说明性图形;图9是由uwb系统采用的状态标识过程的说明性示例;图10是由uwb系统采用的多路径简档过程(multipath profile process)的说明性示例;图11a
‑
11c是uwb系统的说明性示例;以及图12是接收到的cir的均方根能量的说明性图形。
具体实施方式
7.根据需要,本文中公开了详细实施例;然而,要理解的是,所公开的实施例仅仅是示例性的,并且可以以各种和替代形式来体现。各图不一定是按比例的;一些特征可以被放大或最小化以示出特定组件的细节。因此,本文中公开的具体结构和功能细节不应被解释为限制性的,而仅仅是作为用于教导本领域技术人员以各种方式采用本实施例的代表性基础。
8.随着无线技术中的不断进步,人们现在使用任何数量的所连接和个性化的服务。随着无线系统和服务的数量增加,制造商已经开始以不同于最初设想的方式来利用这种现存的系统和服务。例如,制造商已经开始利用射频(rf)收发器(诸如wifi)来穿过墙壁以及在关闭的门后面跟踪移动的人类。使用wifi来跟踪人类移动与用于在电子设备之间传递数据的方式的原始用例有很大不同。通过利用超出预期应用的现存系统,制造商已经能够减少对额外硬件的需要,这进而减少了成本、空间,和/或提供了增加的功率节省。
9.在汽车应用中,对于某些功能而言,钥匙挂扣已经变得越来越常见。例如,当用户定位在车辆附近时,钥匙挂扣可以用于自动将门解锁。或者,当用户定位在车辆内时,钥匙挂扣可以允许用户使用按钮来启动车辆。为了执行这些功能,钥匙挂扣将进行无线通信并且执行认证过程。当前,汽车制造商可能依赖于两种类型的射频(rf)技术。对于无源进入系统(pes)和舒适进入离开(ceg)应用而言,可以使用低频(lf)技术以用于钥匙挂扣的接近和定位。对于远程无钥匙进入而言,可以采用超高频(uhf)技术。然而,传统的lf和uhf技术可能不足以进行附加的利用。例如,传统的lf和uhf技术可能不能够执行对车辆内的用户检测。作为结果,可能需要附加的系统来执行这种功能性。而且,已经已知lf和uhf系统会受到安全性漏洞的影响,该安全性漏洞包括“中继”攻击。存在如下需要:提供一种可以操作以提供不仅仅是车辆访问和启动能力的单个系统,并且提供一种可以以改进的安全性来执行这种功能性的系统。
10.如通过引用并入本文中的美国专利申请no. 16/042,397所公开的,公开了一种超
宽带(uwb)系统,并且该系统可操作以执行某些汽车功能,诸如车辆访问(即,无钥匙进入)。uwb技术相比于lf和uhf技术可能是优选的,这是因为它可以提供更鲁棒的功能性和改进的安全性能力。所设想的是,uwb系统可能也能够提供增加的上下文感知、安全和安全性应用。
11.图1图示了uwb系统100,uwb系统100可以包括定位在车辆102周围的各个位置处的节点110
‑
136。节点110
‑
136的数量和位置可以取决于期望的准确度、应用、性能、和/或车辆102的品牌和型号。例如,uwb系统100可以包括一个或多个节点112,节点112能够监测在车辆102内和车辆102周围的感测区。放置可以允许uwb系统100使用由节点110
‑
124接收到的信息来执行车辆102内部的特征,以及节点126
‑
136接收到的信息来执行车辆102外部的特征。例如,基于从节点126
‑
136接收到的信息,uwb系统100可以检测到用户在车辆102附近,并且随后解锁车辆102的门。如果存在所存储的用户简档,则uwb系统100可以可操作以自动调整车辆座椅、调整后视镜、激活后视相机、将hvac系统调整到期望的车辆车厢温度、或激活车厢内信息娱乐系统。
12.类似地,当uwb系统100确定目标便携式设备106在车辆102内时,节点110
‑
124(即,内部节点)可以用于启动车辆102。uwb系统100还可以可操作以执行以下功能:(1)检测车辆102的状态(例如,车辆102是未占用还是已占用;或者门、窗或后备箱是否打开);(2)监测车辆102内的占用者的生命体征(例如,心率或呼吸率);(3)确定车辆102的占用率(即,对车辆102中的人员数量进行计数);(4)检测靠近车辆的人类移动或活动;(5)当驾驶员/乘客接近(或离开)车辆102时检测占用率;以及(6)在确保完全隐私的同时检测车辆102中的入侵。
13.节点110
‑
136可以包括处理器、存储器和收发器单元。存储器可以被配置成存储程序指令,这些程序指令在被处理器执行时使得节点110
‑
136能够执行本文中其他地方描述的各种操作,包括对目标便携式设备106(例如,钥匙挂扣、智能电话或智能手表)的定位。存储器可以具有能够存储处理器可访问的信息的任何设备类型,诸如能够写入的存储器、只读存储器或其他计算机可读介质。附加地,本领域普通技术人员将认识到,“处理器”可以包括处理数据、信号或其他信息的硬件系统、硬件机构或硬件组件。处理器可以包括具有中央处理单元、多个处理单元、用于实现功能性的专用电路的系统,或者其他系统。
14.节点110
‑
136可以使用被配置成与目标便携式设备106进行通信的超宽带收发器。但是节点110
‑
136还可以包括被配置用于与其他电子设备进行通信的收发器,包括发送通信信号和接收通信信号的能力。节点110
‑
136内包括的收发器可以包括按阵列布置的多个超宽带收发器和/或多个超宽带天线。节点110
‑
136还可以允许节点110
‑
136之间的无线或有线通信、和/或与定位在车辆内的一个或多个控制模块(例如,ecu、hvac系统、安全性系统)或车辆102外部的一个或多个控制模块通信。控制模块还可以包括可操作以在控制模块与节点110
‑
136之间接收、存储和传送信息的处理器和存储器。控制模块还可以可操作以基于从节点110
‑ꢀ
136接收到的信息来控制车辆102内的各种系统(例如,hvac系统)。
15.节点110
‑
136可以作为收发器可操作,以用于发送和接收uwb消息。节点110
‑
136中的一个或多个可以周期性地传送(或闪烁)uwb消息。一个或多个节点110
‑
136可以使用由给定接收器计算的信道脉冲响应(cir)来执行基于uwb的汽车状态感测。例如,图2图示了传送可以由节点118接收的uwb消息的节点110。如所图示,uwb消息可以在车辆102周围的各个点(由示出)处被反射。
16.图形210图示了可以由节点118基于所反射的uwb消息来计算的cir。如所示出,针
对的cir可以具有最大的幅度和最小的时间延迟量,这是因为它没有在车辆102内的任何点处被反射。相反地,针对的cir可以具有最小幅度和最大延迟中的一个,这是因为它在被节点118接收到之前被车辆102的后部点(例如,后备箱)所反射。
17.图3图示了可以由节点110
‑
136传送的示例性uwb分组(消息)。uwb分组的前导码可以包括同步报头,该同步报头可以是64、1024或4096个符号长度的已知前导码序列,随后是8或64个符号长度的帧起始定界符(sfd)。19位物理报头(phr)可以在sfd之后,并且包括针对成功分组解码的信息,诸如随后的数据有效载荷的长度和数据速率。uwb符号(t
s
)可以由多个窄脉冲组成,并且由前导码生成的脉冲可以用于在被节点110
‑
136接收到时计算cir。所示的示例性uwb符号包括码片序列(clipping sequence){1, 0, 2, 3},并且四个示例性脉冲图示了 1、
‑
1、
‑
1和 1的极性。所传送的uwb符号可以由以下等式来表示:(等式1)其中标示持续时间为tp的uwb脉冲;t
f
可以是给定帧(即,可以被划分成n
f
个帧的符号)的持续时间;b
j
∈{
‑
1, 1}标示极性码;c
j
标示跳跃序列;t
c
是码片持续时间;并且e
p
表示符号的能量。跳跃序列c
j
也可以是集合{1,2...n
h
}的一部分,其中n
h
是跳跃间隙的数量(即,跳跃码可以确定帧的n
h
个间隙内的脉冲的位置)。
18.如参考图2所描述,uwb消息在被给定节点接收之前可以无线地跨多个路径行进。针对由任何数量的不同路径所反射的给定uwb消息在给定节点(例如,节点122)处接收到的信号可以由以下等式来表示:(等式2)其中和指代第l个路径的复衰减(complex attenuation)和飞行时间。节点110
‑
136内包括的uwb接收器可以利用由图3图示的已知前导码序列的周期性自相关性质来计算cir。换句话说,uwb接收器可以将接收到的信号与已知的前导码序列进行相关,以计算信道脉冲(cir),该信道脉冲(cir)由以下等式来表示:等式3其中表示狄拉克德尔塔函数。节点110
‑
136可以使用该计算的cir以通过利用汽车的不同状态可能不同地影响cir的直觉来标识汽车状态。
19.图4a是在校准或初始设置过程期间操作的uwb系统100的流程图400。图4b是运行时过程期间操作的uwb系统的流程图430。下面将讨论由流程图400所图示的校准过程与由流程图430所图示的运行时过程之间的相似性和差异。
20.在步骤410和432处,uwb系统100可以选择节点110
‑
136之一来作为传送器操作。针对流程图430,链路选择(即,节点选择)可以基于由流程图400执行的校准过程来预先确定。
21.参考流程图400,可以基于节点110
‑
136的连接性(uwb分组递送速率)和接收到的分组的强度以及位置来选择传送节点。换句话说,步骤410可以确定节点110
‑
136中的哪些可操作以彼此通信。
22.例如,图5a是图示了节点110
‑
136的连接性矩阵(即,闪烁递送速率)的图形500。纵轴图示了来自节点110
‑
136的给定uwb分组的传送(tx)。横轴图示了在节点110
‑
136处对所
传送的uwb分组的接收(rx)。对于所图示的连接性矩阵而言,uwb系统100可以使每个节点110
‑
136依次发送众多闪烁(例如,14000个闪烁),并且然后uwb系统100可以计算节点110
‑
136处的闪烁递送速率。连接性矩阵图示了针对强uwb分组递送比的“1”、以及针对弱uwb分组递送比的“0”。如所示出,定位在车辆102的后部(例如,后备箱)的节点124相对于定位在车辆102的前端处的节点126和128可以具有低(弱)递送比。
23.图5b是图示了在节点110
‑
136处所确定的平均接收信号强度(rss)的另一个图形510。纵轴图示了来自节点110
‑
136的给定uwb分组的传送(tx)。横轴图示了在节点110
‑
136处对所传送的uwb分组的接收(rx)。还可以理解的是,更少的负rss数量指示更高的信号强度。如图5b所示,由定位在车辆102后部的节点124所传送的uwb分组在节点126或128处被接收时将具有低信号强度。然而,由节点112传送的信号在被节点110接收到时将具有高信号强度。图5b图示了节点110
‑
124(即,内部节点)可以具有高rss,这是因为不存在阻碍所传送的信号的显著衰减对象(诸如,车辆102的金属框架)。图5b还图示了节点126
‑
136(即,外部节点)可以具有较低的rss,这是因为所传送的信号可能被车辆102的金属框架所阻碍。
24.使用从连接性测试收集的数据,校准过程可以将节点110确立为传送节点(即,标签),并且将剩余节点112
‑
136确立为接收器(即,从属节点)。节点110可以被选择作为传送节点,这是因为:(1)节点110可以以相当高的功率与节点112
‑
136进行通信;以及(2)节点110可以在车辆102中创建对称的感测区域。
25.在运行时过程(即,图4b)期间,uwb系统100可以存储连接性测试的结果,使得节点110被选择作为传送节点(即,标签),并且剩余节点112
‑
136被选择作为接收器(即,从属节点)。或者,可以对uwb系统100进行预编程,使得节点110被确立为传送节点(即,标签),并且剩余节点112
‑
136被确立为接收器(即,从属节点)。
26.因为uwb系统100可以使用单个传送节点(例如,节点110可以被认为是“标签”),所以总共n个节点(例如,节点110
‑
136)可以是可用的,而n
‑
1个链路被视为传感器(例如,因为节点110被认为是“标签”,所以节点112
‑
136是传感器或“从属”)。然而,所设想的是,可以以循环(round
‑
robin)方式使n个内部节点成为传送器。uwb系统100然后可以使用n(n
‑
1)/2个链路作为传感器。通过以循环方式进行操作,可以减少平均功率汲取,这是因为作为传送器的操作节点110
‑
136将比单独作为接收器的操作节点112
‑
136汲取更少的电流。此外,以循环方式进行操作也可以改进uwb系统100的鲁棒性。此外,可以使节点子集成为如下传送器:所述传送器与相应的不相交(互斥)接收器子集进行通信,同时在不同频带上与传送器进行通信。
27.在步骤412和440处,可以通过频域中的插值和上采样来增加由节点110
‑
136的接收器所计算的cir的分辨率,以帮助准确对准和特征提取。同样,节点110可以传送当被节点112
‑
136接收到时将具有相关联的cir的闪烁。对于1ghz的uwb带宽而言,cir抽头可能相隔1纳秒。可以通过上采样过程来增加cir的分辨率,其中uwb系统100可以使接收到的响应来仿真原始模拟波形。通过执行上采样过程,uwb系统100可能能够更准确地对准由给定节点(例如,节点110)接收到的cir。图6是图示了可以如何对原始cir波形610执行上采样过程以生成上采样cir波形612的图形600。在校准过程(即,图4a)期间,步骤412可以经历若干次测试迭代,以改进所采用的上采样算法。在步骤440处,uwb系统100将基于在步骤412期间确立的预定义上采样算法进行操作。
28.所设想的是,在上采样过程(即,步骤412和440)期间采用的算法可以包括在时域cir y上操作的快速傅立叶变换(fft)算法。上采样过程(即,步骤412和440)还可以按n*(k
‑
1)的因子对频域信号进行零填充(zero
‑
pad),其中n可以是cir中的抽头数量,并且k可以是上采样因子。上采样过程(即步骤412和440)还可以通过对上采样的频域信号取逆fft来获得经上采样的cir 。
29.在步骤414和442处,可以采用cir对准过程来将cir随机地移位。步骤414和442可以通过在参考抽头处枢转第一(直接)路径来对准由节点110
‑
136接收到的cir。例如,图7a图示了当例如由节点110接收到时可以被计算的五个单独的cir。如所图示,这五个cir在由节点110计算时是未对准的,这是因为在节点110的接收器与这五个cir已经在其中起源的节点(例如,节点126)的传送器之间可能不存在同步。因此,所设想的是,cir对准可能是必要的,因为节点110的接收器与节点126的传送器相对于彼此不同步。在所有节点110
‑
136的接收器与传送器之间可能发生相同的未对准。因此,所设想的是,可以使用参考时钟来实现节点110
‑
136之间的同步,尽管这可能由于将需要遍及车辆102的广泛布线来连接节点110
‑
136而是不合期望的。
30.所设想的是,如果节点110
‑
136通过标识可能通常独立于环境而发生在所有cir中的“事件”来执行对准,则可以避免物理布线。uwb系统100然后可能能够将该“事件”的位置(即,抽头)移位到参考枢轴抽头。换句话说,取决于与第一(直接)路径的到达相对应的抽头,cir可以以cir移位的程度被不同地移位。一旦uwb系统100已经执行了对cir的移位,由给定节点110
‑
136计算的cir的第一路径现在就可以出现在枢轴处。所设想的是,第一路径可以不是最强路径,并且节点126、128、134和136可以被选择作为第一路径,但是选择节点126、128、134和136作为第一路径可能需要进一步的衰减。图7a示出了在移位过程已经发生之后可以如何对准由节点110接收到的五个cir。
31.所设想的是,抽头位置可以对应于第一路径的到达(即,第一路径索引(fp
idx
))。该第一路径对准可以受益于上采样,这是由于与原始cir抽头分辨率(例如,1纳秒)相比,fp
idx
可以以精细得多的分辨率(例如,15.625皮秒)而出现。节点(例如,节点110)接收到的任何两个cir之间的“滞后(lag)”可以对应于它们的第一路径索引之间的差异。uwb系统100可以使用以下等式来获得经对准的cir :
ꢀꢀꢀ
等式4其中t指代抽头,并且。
32.参考流程图400,校准过程可以包括步骤416,其中,用于节点110
‑
136的潜在接收器集合可以被缩减到对位置改变更鲁棒的那些节点。换句话说,在相对于其他节点(例如,节点112
‑
136)来对准由给定节点(例如,节点110)接收到的cir时,校准过程可以用于确定哪个(如果有的话)其他节点也可以作为接收器而操作。例如,图8图示了其中车辆102停放在四个不同的位置处的图形800。在该示例中,车辆102停放在室内车库内的两个不同的位置处、其中另一车辆停放在车辆102旁边的室外位置处、以及其中没有障碍物定位在车辆102旁边的室外位置处。在该示例中,校准过程可以用于选择用于传送的节点110和用于接收的节点112
‑
136。如图8所示,校准过程可以用于确立节点110
‑
124(内部节点)比节点126
‑
136(外部节点)具有高得多的相关性。在该示例中,校准过程将会用于确立内部节点比车辆
102的外部节点对位置改变更鲁棒。所设想的是,如果节点110
‑
136被放置在不同的位置中、或者使用了不同大小/类型的车辆,则校准过程可以使用用于接收和传送的不同节点集合来进行确立。
33.参考步骤416,可以计算定位在自由空间中的cir与用于节点112
‑
124(即,内部节点)和节点126
‑
136(即,外部节点)的剩余位置之间的平均皮尔逊相关系数。持续时间t个抽头的两个cir x和y之间的相关系数r可以使用以下等式来确定:
ꢀꢀ
(等式5)其中,x
i
、y
i
分别指代cir x和y的第i个抽头中的cir幅度,并且x、y指代两个cir的样本均值。
34.一旦uwb系统100已经选择了感兴趣的收发器并且将cir转换成期望的格式,uwb系统100就可以标识车辆102的感兴趣状态。uwb系统100可以确定车辆状态(例如,门打开、窗打开、后备箱打开、或内部人员)的改变,该改变更改了车辆102内部的多路径反射,该多路径反射然后可以在cir中被观察到。例如,打开车辆102的驾驶员侧的门可以消除(或创建)如果门关闭则可能不存在的反射。uwb系统100可以检测反射中的这些改变以推断车辆状态。uwb系统100可以使用步骤418和420的组合来执行该状态推断。
35.在步骤418和444处,可以通过将节点观察到的cir与参考语料库进行相关来标识k个最可能的状态。在校准过程期间,步骤418可以包括训练阶段,其中可以应用cir的训练数据集来改进决策算法。在运行时过程期间,步骤444将不被提供训练数据集,而是将取而代之对接收到的cir进行操作。在已经修剪了(prune)状态空间的情况下,步骤420和446可以用于从cir中提取特征(即,生成多路径简档),该特征然后可以用于标识给定的车辆状态。
36.在步骤418和446处,该算法可以推断出一些状态可能被一些节点(例如,节点110)更好地捕获,而其他节点(例如,节点112
‑
136)可以推断出等同于“空”的cir。该算法可以可操作以允许节点110
‑
126对由于所传送的闪烁所致的、与(由节点)观察到的cir的基于状态的相关性进行表决。该算法还可以使用表决结果来计算处于可能状态中的似然性。步骤418和446所采用的算法还可以融合(例如,使用向量求和函数)来自所有节点的似然估计,以获得前k最可能的状态。所设想的是,作为步骤418的一部分,可以使用训练阶段和测试阶段来完善该算法。步骤446然后可以采用由步骤418完善的算法。
37.图9图示了可以由步骤418采用的训练阶段910和测试阶段912。所设想的是,训练阶段910可以在流程图400所图示的校准过程期间使用。然而,测试阶段912可以在流程图400所图示的校准过程和流程图430所图示的运行时过程期间采用。
38.在训练阶段910期间,uwb系统100可以设置r={r
110
,r
112
...r
n
}。该向量可以更高或更低,这取决于车辆102内部署的编号(n)节点。例如,步骤418可以将n确立为与车辆102内采用的最终节点(即,r
136
)相关。
39.步骤418还可以确立感兴趣的车辆状态集合(s)。该感兴趣的车辆状态集合可以被表示为s={s1,s2...s
n
)。例如,该集合可以包括:车辆为空(s1)、前门打开(s2)、前窗打开(s3)、后门打开(s4)、后窗打开(s5)、后备箱打开(s6)、位于前排座椅中的人员(s7)、或位于后排座椅中的人员(s8)。感兴趣的车辆状态集合不限于这些示例,并且该集合可以包括更多或更少的状态,这取决于应用。
40.如图9所示,然后可以提供针对模拟汽车状态的训练cir 920(例如,)。例如,可以与车辆为空状态s1相关。步骤418可以继续对接收器节点r
n
的状态的cir进行操作。如所示出,步骤418还可以包括由节点110
‑
136针对状态的语料库参考cir 922的集合。语料库参考cir 922的集合可以表示为,其中i< n。步骤418可以将给定cir与其语料库(c
i
)中的其他cir进行相关,并且计算与状态的平均相关性。例如,语料库可以与其中车辆102的前门打开的状态进行相关。
41.步骤418可以进一步操作以生成针对n个节点中的每一个(即,针对节点110
‑
136)的维度s x s的似然矩阵lm
i
(其中i< n)。步骤418可以可操作以选择和存储最大相关性状态()。步骤418可以重复训练阶段910,以通过节点r
i
生成状态s
x
的不同cir,从而结果产生最大似然向量924()。步骤418还可以计算可以被表示如下的似然矩阵的行:步骤418可以可操作以针对车辆102内包括的每个节点110
‑
136和每个状态重复训练阶段910。在完成训练阶段910时,生成具有维度s x s的似然矩阵。
42.一旦训练阶段910完成,步骤418然后就可以采用测试阶段912来评估在训练阶段910期间确立的机器学习算法。所设想的是,在步骤418期间,可以采用测试阶段912来允许对算法的进一步修改。例如,步骤418可以提供模拟的cir以评估和进一步改进机器学习算法。在运行时过程(即,图4b)期间,步骤446还可以采用测试阶段912,然而,接收节点(例如,节点110)将对其他节点(例如,节点112
‑
136)接收到的cir进行操作。
43.因此,所设想的是,测试阶段912过程可以由步骤418或步骤446采用。所设想的是,节点110可以首先接收模拟cir(即,步骤418),或者节点110可以从定位在车辆102内的其他节点112
‑
136中的一个或多个接收cir。然后,可以将接收到的cir与语料库参考cir 922进行相关。然后,使用语料库参考cir 922选择最大相关性状态(s
max
)。然后,可以使用来自最大似然矩阵924的列来生成第一似然向量926。
44.步骤418和446然后将针对被包括在车辆102内的节点(如框916所示)重复测试阶段912过程,以生成第二似然向量928。一旦针对每个节点已经完成了测试阶段912,步骤418和446就将把所有生成的似然向量(即,第一似然向量926和第二似然向量928)融合在一起(由向量求和930示出)以生成前k向量932。所设想的是,前k向量932可以是根据所求和的每个节点而处于每个状态中的概率值。
45.还设想的是,在训练阶段910和测试阶段912期间确立的机器学习算法可以被提供给远程存储系统(例如,云存储装置)。机器学习算法然后可以被提供给其他车辆以执行车辆状态标识。还可以设想,车辆102同样可以访问和下载存储在远程存储系统上的机器学习算法。
46.步骤420和448然后可以操作以从每个节点110
‑
136的接收到的cir中提取特征。所设想的是,可以在步骤420和448处生成多路径简档,以从k个入围的状态中标识汽车状态。步骤420和448可以可操作以标识汽车状态,因为给定cir可以代表环境如何影响所传送的
1212和1214来确定存在位于前排驾驶员座椅中的人员。
53.在图11c所图示的示例中,节点110、130和134再次传送和接收cir。在该示例中,uwb系统100可以基于cir数据来确定存在靠近车辆102定位的障碍物1214。
54.图12是图示了在各种操作状态期间可以由节点110传送并且由节点134接收的cir的均方根能量的图形1200。图12再次图示了uwb系统100可以如何使用流程图400和430所图示的过程来确定车辆状态的示例。
55.参考图12,uwb系统100可以使用0
‑
1000之间的cir来确定车辆102正在没有障碍物的静止状态中操作。针对1000
‑
2000之间的cir,uwb系统100可以确定人员可能定位在车辆102之外近似5厘米。针对2500
‑
3500之间的cir,uwb系统100可以确定人员可能定位在车辆102之外近似100厘米。针对3500
‑
4500之间的cir,uwb系统100可以确定车辆102的前门是打开的。并且针对4500
‑
5500之间的cir,uwb系统100可以确定人员位于车辆102内。
56.本文中公开的过程、方法或算法可以可递送到处理设备、控制器或计算机/由处理设备、控制器或计算机来实现,所述处理设备、控制器或计算机可以包括任何现有的可编程电子控制单元或专用电子控制单元。类似地,过程、方法或算法可以以多种形式存储为可由控制器或计算机执行的数据、逻辑和指令,所述形式包括但不限于永久存储在不可写存储介质(诸如,rom设备)上的信息以及可更改地存储在可写存储介质(诸如,软盘、磁带、cd、ram设备)和其他磁性和光学介质上的信息。这些过程、方法或算法也可以在软件可执行对象中实现。替代地,这些过程、方法或算法可以使用合适的硬件组件(诸如,专用集成电路(asic)、现场可编程门阵列(fpga)、状态机、控制器或其他硬件组件或设备)或者硬件、软件和固件组件的组合来全部或部分地体现。
57.虽然上面描述了示例性实施例,但是这些实施例并不意图描述本发明的所有可能形式。而是,说明书中使用的词语是描述性而不是限制性的词语,并且应理解的是,在不脱离本发明的精神和范围的情况下,可以做出各种改变。附加地,各种实现实施例的特征可以被组合以形成本发明的另外的实施例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。