1.本发明涉及无人艇控制领域,特别是涉及一种无人艇跟踪控制方法及系统。
背景技术:
2.近几十年来,由于自主式无人水面舰艇(unmanned surface vessel,usv)在海上救援、资源勘探、礁体探测等领域的广泛应用,其跟踪控制引起了海洋技术、控制科学等领域的广泛关注。
3.usv控制系统的快速准确跟踪能力在珊瑚礁测绘、海上补给、通过狭窄水道等实际应用中发挥着重要作用。因此,要完成这些任务,通常需要usv的高控制性能,即快速跟踪和精确跟踪。然而,usv通常受限于由水动力阻尼力和外部扰动(如波浪、洋流和风)引起的未建模动力学,这可能导致较大的跟踪误差,甚至系统发散。
4.目前,已设计出的基于事件触发的无人艇跟踪控制,未考虑无人艇模型不确定、外界干扰、无人艇跟踪误差限制以及跟踪时间限制等问题。因此,无人艇跟踪控制精度有待提高。
技术实现要素:
5.基于此,有必要提供一种无人艇跟踪控制方法及系统,在考虑无人艇模型不确定和外界干扰的情况下,实现在预设误差性能范围内和在有限时间内实现跟踪控制,提高无人艇跟踪控制的精度。
6.为实现上述目的,本发明提供了如下方案:
7.一种无人艇跟踪控制方法,包括:
8.获取无人艇的实际位置信息和期望位置信息;
9.基于所述实际位置信息和所述期望位置信息,采用预设性能函数计算非约束跟踪误差;
10.由所述实际位置信息、所述期望位置信息和所述非约束跟踪误差计算虚拟控制率,并由所述虚拟控制率和一阶低通滤波器,得到虚拟误差面和滤波误差;
11.采用径向基神经网络估计未知时变项目,得到无人艇模型;所述未知时变项目包括水动力阻尼参数、科氏加速度和向心加速度;
12.基于所述无人艇模型,对复合干扰进行估计,得到复合干扰估计值;所述复合干扰包括所述无人艇模型的估计误差和外界干扰;
13.由所述虚拟误差面、所述滤波误差、所述无人艇模型和所述复合干扰估计值确定跟踪控制率;所述跟踪控制率用于控制无人艇的轨迹跟踪。
14.可选的,在所述由所述虚拟误差面、所述滤波误差、所述无人艇模型和所述复合干扰估计值确定跟踪控制率之后,还包括:
15.计算当前时刻的跟踪控制率与上一时刻的跟踪控制率的差值;
16.判断所述差值是否大于设定值;
17.若是,则控制执行器以所述当前时刻的跟踪控制率控制无人艇的轨迹跟踪;
18.若否,则保持上一时刻的跟踪控制率。
19.可选的,所述实际位置信息包括大地坐标系下的位置坐标、大地坐标系下的艏向角坐标、船体坐标系下的纵向速度、船体坐标系下的横向速度和船体坐标系下的艏向角速度;
20.所述期望位置信息包括大地坐标系下的期望位置坐标、大地坐标系下的期望艏向角坐标、船体坐标系下的期望纵向速度、船体坐标系下的期望横向速度和船体坐标系下的期望艏向角速度。
21.可选的,所述基于所述实际位置信息和所述期望位置信息,采用预设性能函数计算非约束跟踪误差,具体包括:
22.采用所述实际位置信息建立无人艇动力学模型;
23.采用所述期望位置信息计算期望轨迹;
24.由所述无人艇动力学模型和所述期望轨迹计算跟踪误差;
25.采用预设性能函数将所述跟踪误差转换为所述非约束跟踪误差。
26.可选的,所述虚拟控制率为:
[0027][0028][0029][0030]
其中,u
α
为纵向虚拟控制率,v
α
为横向虚拟控制率,r
α
为艏向角虚拟控制率,ψ为大地坐标系下的艏向角坐标,ψ
d
为大地坐标系下的期望艏向角坐标,u
d
为船体坐标系下的期望纵向速度,v
d
船体坐标系下的期望横向速度,r
d
为船体坐标系下的期望艏向角速度,为ρ1的一阶导数,为ρ2的一阶导数,为ρ3的一阶导数,k
11
表示无人艇在纵向方向的虚拟控制器的第一设计参数,k
12
表示无人艇在纵向方向的虚拟控制器的第二设计参数,k
21
表示无人艇在横向方向的虚拟控制器的第一设计参数,k
22
表示无人艇在横向方向的虚拟控制器的第二设计参数,k
31
表示无人艇在艏向角方向的虚拟控制器的第一设计参数,k
32
表示无人艇在艏向角方向的虚拟控制器的第二设计参数;l表示跟踪误差收敛指数,0<l<1;z1表示无人艇在大地坐标系中沿地球纬线方向的跟踪误差,z2表示无人艇在大地坐标系中沿地球经线方向的跟踪误差,z3表示无人艇在大地坐标系中沿地球艏向方向的跟踪误差,ρ1表示z1的界限函数,ρ2表示z2的界限函数,ρ3表示z3的界限函数,s1表示转换后纵向方向的非约束跟踪误差,s2表示转换后横向方向的非约束跟踪误差,s3表示转换后艏向角方向的非约束跟踪误差,κ1表示无人艇在纵向上的跟踪误差辅助函数,κ2表示无人艇在横向上的跟踪误差辅助函
数,κ3表示无人艇在艏向上的跟踪误差辅助函数,sig(s1)表示s1的符号与s1的绝对值的乘积,sig(s2)表示s2的符号与s2的绝对值的乘积,sig(s3)表示s3的符号与s3的绝对值的乘积。
[0031]
可选的,由所述虚拟控制率和一阶低通滤波器,得到虚拟误差面和滤波误差,具体包括:
[0032]
将所述虚拟控制率输入一阶低通滤波器,得到滤波控制率;
[0033]
由所述滤波控制率和所述实际位置信息计算虚拟误差面;所述虚拟误差面包括纵向虚拟误差、横向虚拟误差和艏向角虚拟误差;
[0034]
由所述滤波控制率和所述虚拟控制率计算滤波误差;所述滤波误差包括纵向滤波误差、横向滤波误差和艏向角滤波误差。
[0035]
可选的,所述无人艇模型为:
[0036][0037][0038][0039]
其中,为纵向未知时变项目估计值,为横向未知时变项目估计值,为艏向角未知时变项目估计值,为纵向权重向量估计值,为横向权重向量估计值,为艏向角权重向量估计值,θ
u
为纵向径向基函数向量,θ
v
为横向径向基函数向量,θ
r
为艏向角径向基函数向量。
[0040]
可选的,所述复合干扰估计值为:
[0041][0042][0043][0044]
其中,为纵向复合干扰估计值,为横向复合干扰估计值,为艏向角复合干扰估计值,为纵向辅助变量估计值,为横向辅助变量估计值,为艏向角辅助变量估计值,η
u
为干扰观测器的横向参数,η
v
为干扰观测器的纵向参数,η
r
为干扰观测器的艏向角参数,u为船体坐标系下的纵向速度,v为船体坐标系下的横向速度,r为船体坐标系下的艏向角速度。
[0045]
可选的,所述跟踪控制率为:
[0046][0047][0048]
[0049]
其中,为纵向跟踪控制率,为横向跟踪控制率,为艏向角跟踪控制率,s4为纵向虚拟误差,s5为横向虚拟误差,s6为艏向角虚拟误差,为纵向未知时变项目估计值,为横向未知时变项目估计值,为艏向角未知时变项目估计值,为纵向复合干扰估计值,为横向复合干扰估计值,为艏向角复合干扰估计值,z
u
为纵向滤波误差,z
v
为横向滤波误差,z
r
为艏向角滤波误差,m
11
表示无人艇沿纵向方向的固有质量,m
22
表示无人艇沿横向方向的固有质量,m
33
表示无人艇沿艏向角方向的固有质量;k
41
表示无人艇在纵向方向的跟踪控制器的第一设计参数,k
42
表示无人艇在纵向方向的跟踪控制器的第二设计参数,k
51
表示是无人艇在横向方向的跟踪控制器的第一设计参数,k
52
表示无人艇在横向方向的跟踪控制器的第二设计参数,k
61
表示是无人艇在艏向角方向的跟踪控制器的第一设计参数,k
62
表示是无人艇在艏向角方向的跟踪控制器的第二设计参数;表示无人艇在纵向方向的跟踪控制器的触发阀值,表示无人艇在横向方向的跟踪控制器的触发阀值,表示无人艇在艏向角方向的跟踪控制器的触发阀值;ρ
u
表示无人艇在纵向方向的跟踪控制器的触发调节系数,ρ
v
表示无人艇在横向方向的跟踪控制器的触发调节系数,ρ
r
表示无人艇在艏向角方向的跟踪控制器的触发调节系数,λ1表示无人艇在纵向方向的低通滤波器的设计参数,λ2表示无人艇在横向方向的低通滤波器的设计参数,λ3表示在艏向角方向的低通滤波器的设计参数,sig(s4)表示s4的符号与s4的绝对值的乘积,sig(s5)表示s5的符号与s5的绝对值的乘积,sig(s6)表示s6的符号与s6的绝对值的乘积。
[0050]
本发明还提供了一种无人艇跟踪控制系统,包括:
[0051]
信息获取模块,用于获取无人艇的实际位置信息和期望位置信息;
[0052]
误差计算模块,用于基于所述实际位置信息和所述期望位置信息,采用预设性能函数计算非约束跟踪误差;
[0053]
滤波模块,用于由所述实际位置信息、所述期望位置信息和所述非约束跟踪误差计算虚拟控制率,并由所述虚拟控制率和一阶低通滤波器,得到虚拟误差面和滤波误差;
[0054]
模型估计模块,用于采用径向基神经网络估计未知时变项目,得到无人艇模型;所述未知时变项目包括水动力阻尼参数、科氏加速度和向心加速度;
[0055]
干扰估计模块,用于基于所述无人艇模型,对复合干扰进行估计,得到复合干扰估计值;所述复合干扰包括所述无人艇模型的估计误差和外界干扰;
[0056]
轨迹跟踪控制模块,用于由所述虚拟误差面、所述滤波误差、所述无人艇模型和所述复合干扰估计值确定跟踪控制率;所述跟踪控制率用于控制无人艇的轨迹跟踪。
[0057]
与现有技术相比,本发明的有益效果是:
[0058]
本发明实施例提出了一种无人艇跟踪控制方法及系统,基于实际位置信息和期望位置信息,采用预设性能函数计算非约束跟踪误差,使无人艇的跟踪误差一直保持在预设的范围内,无人艇的跟踪精度得到限制,无人艇能够精准的跟上期望轨迹;采用径向基神经网络估计水动力阻尼参数、科氏加速度和向心加速度,得到的无人艇模型,考虑了模型的不确定性;基于无人艇模型,对估计误差和外界干扰构成的复合干扰进行估计,得到复合干扰估计值,考虑干扰情况;由虚拟误差面、滤波误差、无人艇模型和复合干扰估计值确定跟踪控制率,该跟踪控制率在无人艇轨迹跟踪时具有抵抗模型参数不确定和外界干扰的能力,
因此,采用本发明的方法或系统,能提高无人艇跟踪控制的精度。此外,针对某些对时间有要求的任务,采用发明的方法或系统确定的跟踪控制率可以使无人艇在有限的时间内完成跟踪任务。
附图说明
[0059]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0060]
图1为本发明实施例提供的无人艇跟踪控制方法的流程图;
[0061]
图2为无人艇平面模型示意图;
[0062]
图3为无人艇跟踪控制方法的控制过程示意图;
[0063]
图4为无人艇轨迹跟踪示意图;
[0064]
图5为无人艇跟踪误差示意图;
[0065]
图6为控制输入对比示意图;
[0066]
图7为控制器的触发时刻示意图;
[0067]
图8为复合干扰和干扰观测器估计值对比示意图;
[0068]
图9为本发明实施例提供的无人艇跟踪控制系统的结构图。
具体实施方式
[0069]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0070]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0071]
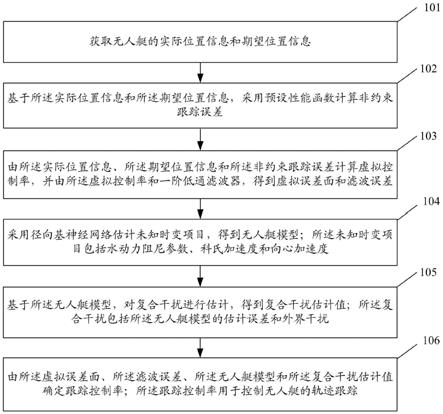
图1为本发明实施例提供的无人艇跟踪控制方法的流程图。参见图1,本实施例的无人艇跟踪控制方法,包括:
[0072]
步骤101:获取无人艇的实际位置信息和期望位置信息。
[0073]
所述实际位置信息包括大地坐标系下的位置坐标、大地坐标系下的艏向角坐标、船体坐标系下的纵向速度、船体坐标系下的横向速度和船体坐标系下的艏向角速度。
[0074]
所述期望位置信息包括大地坐标系下的期望位置坐标、大地坐标系下的期望艏向角坐标、船体坐标系下的期望纵向速度、船体坐标系下的期望横向速度和船体坐标系下的期望艏向角速度。
[0075]
步骤102:基于所述实际位置信息和所述期望位置信息,采用预设性能函数计算非约束跟踪误差。
[0076]
步骤102,具体包括:
[0077]
(1)采用所述实际位置信息建立无人艇动力学模型。无人艇动力学模型为
[0078]
[0079][0080]
其中η=[x,y,ψ]
t
,(x,y)和ψ是大地坐标系下的位置坐标和艏向角坐标,为η的一阶导数;ν=[u,v,r]
t
,u、v和r分别代表了无人艇船体坐标系下的纵向速度、横向速度和艏向角速度,为ν的一阶导数,如图2所示。图2中,o
e
表示大地坐标系的原点,x
e
和y
e
分别表示地球纬线方向和经线方向;o
b
表示船体坐标系的原点,g(o
b
)表示船体坐标系,x
b
和y
b
分别表示无人艇纵向方向和垂直于纵向的横向方向;f
u
表示在船体坐标系中的纵向方向的控制输入。横向方向的控制输入和艏向方向的控制输入分别为f
v
和f
r
,t
r
表示无人艇跟踪系统会在跟踪到期望轨迹的时间。
[0081]
d=[d
u
,d
v
,d
r
]
t
代表时变外界干扰,例如风、浪、流等;τ=[τ
u
,τ
v
,τ
r
]
t
是无人艇的控制输入向量,τ
u
、τ
v
和τ
r
分别为纵向力、横向力和艏向角扭矩。为旋转矩阵;为惯性矩阵;为科氏加速度和向心加速度矩阵;为水动力阻尼矩阵。
[0082]
(2)采用所述期望位置信息计算期望轨迹。期望轨迹为
[0083][0084]
其中η
d
=[x
d
,y
d
,ψ
d
]
t
,x
d
、y
d
和ψ
d
是无人艇在大地坐标系下的期望位置坐标和艏向角坐标,v
d
=[u
d
,v
d
,r
d
]
t
,u
d
、v
d
和r
d
是无人艇船体坐标系下的期望纵向速度、期望横向速度和期望艏向角速度。
[0085]
(3)由所述无人艇动力学模型和所述期望轨迹计算跟踪误差。具体为:
[0086]
假设无人艇的跟踪误差为:z=η
‑
η
d
=[z1,z2,z3]
t
=[x
‑
x
d
,y
‑
y
d
,ψ
‑
ψ
d
]
t
。
[0087]
(4)采用预设性能函数将所述跟踪误差转换为所述非约束跟踪误差。
[0088]
本实施例对无人艇的跟踪误差要满足如下约束:
[0089]
‑
ρ
i
(t)<z
i
(t)<ρ
i
(t),i=1,2,3;
[0090]
其中,ρ
i
(t)为预设性能函数,该函数为预先设定以指数形式衰减的界限函数,其形式如下所示:
[0091]
ρ
i
(t)=(ρ
i0
‑
ρ
i∞
)exp(
‑
w
i
t) ρ
i∞
,i=1,2,3;
[0092]
其中ρ
i0
和ρ
i∞
为预设性能函数的初始值和稳定值,w
i
为预设收敛率,该函数可以调整无人艇跟踪误差的暂态和稳态精度,从而提高无人艇的跟踪精度。
[0093]
控制器将无人艇的跟踪误差(受限跟踪误差)转换为非约束跟踪误差(非受限跟踪误差),如下所示:
[0094]
z
i
=ρ
i
(t)υ(s
i
(t)),t>0,i=1,2,3,;
[0095]
其中,s
i
(t)是转换后得到的非约束跟踪误差,υ(s
i
(t))为严格递增函数,其形式如下:
[0096][0097]
其中υ
i
=υ(s
i
(t))。如无说明,本实施例中υ
i
=υ(s
i
(t))。
[0098]
如果该非约束跟踪误差有界,则跟踪误差就保持在预设界限内。
[0099]
步骤103:由所述实际位置信息、所述期望位置信息和所述非约束跟踪误差计算虚拟控制率,并由所述虚拟控制率和一阶低通滤波器,得到虚拟误差面和滤波误差。具体为:
[0100]
(1)控制器通过位置传感器获得的无人艇的位置信息、期望位置信息和控制器处理后的非约束跟踪误差,通过跟踪误差反馈设计出如下虚拟控制率:
[0101][0102][0103][0104]
其中,u
α
为纵向虚拟控制率,v
α
为横向虚拟控制率,r
α
为艏向角虚拟控制率,l为正的虚拟控制率设计参数,ψ为大地坐标系下的艏向角坐标,ψ
d
为大地坐标系下的期望艏向角坐标,u
d
为船体坐标系下的期望纵向速度,v
d
船体坐标系下的期望横向速度,r
d
为船体坐标系下的期望艏向角速度,为ρ1的一阶导数,为ρ2的一阶导数,为ρ3的一阶导数。
[0105]
其中κ1,κ2,κ3分别表示无人艇在纵向,横向和艏向上的跟踪误差辅助函数。k
11
、k
12
、k
21
、k
22
、k
31
、k
32
和l均为正的虚拟控制器设计参数。k
11
表示无人艇在纵向方向的虚拟控制器的第一设计参数,k
12
表示无人艇在纵向方向的虚拟控制器的第二设计参数,k
21
表示无人艇在横向方向的虚拟控制器的第一设计参数,k
22
表示无人艇在横向方向的虚拟控制器的第二设计参数,k
31
表示无人艇在艏向角方向的虚拟控制器的第一设计参数,k
32
表示无人艇在艏向角方向的虚拟控制器的第二设计参数;l表示跟踪误差收敛指数,0<l<1,l表征跟踪误差收敛速度;z1表示无人艇在大地坐标系中沿地球纬线方向的跟踪误差,z2表示无人艇在大地坐标系中沿地球经线方向的跟踪误差,z3表示无人艇在大地坐标系中沿地球艏向方向的跟踪误差,ρ1表示z1的界限函数,ρ2表示z2的界限函数,ρ3表示z3的界限函数,ρ1、ρ2和ρ3用于约束跟踪误差在指数递减边界内,sig(g)表示函数g的符号与其绝对值乘积,即sig(g)=sign(g)*|g|,sign(
·
)表示符号函数,g为任意函数。s
i
(t)是转换后得到的非约束跟踪误差,s1表示转换后纵向方向的非约束跟踪误差,s2表示转换后横向方向的非约束跟踪误差,s3表示转换后艏向角方向的非约束跟踪误差。该虚拟控制率可以使无人艇在有限时间内跟踪上期望轨迹。
[0106]
(2)将所述虚拟控制率输入一阶低通滤波器,得到滤波控制率。具体的:
[0107]
由于在设计实际控制器之前,控制器需要对虚拟控制率求导,而通常情况下虚拟控制率求导运算计算量较大,因此本实施例引入一阶低通滤波器,将虚拟控制率通过一阶低通滤波器,其输出值即是虚拟控制率导数的估计值。一阶低通滤波器形式如下:
[0108][0109]
[0110][0111]
其中,λ1表示无人艇在纵向方向的低通滤波器的设计参数,λ2表示无人艇在横向方向的低通滤波器的设计参数,λ3表示在艏向角方向的低通滤波器的设计参数,λ1、λ2和λ3均为正的设计参数。u
f
、v
f
和r
f
是将虚拟控制率u
α
、v
α
和r
α
通过一阶低通滤波器后得到滤波控制率,u
f
为纵向滤波控制率,v
f
为横向滤波控制率,r
f
为艏向角滤波控制率,为u
f
的一阶导数,为v
f
的一阶导数,为r
f
的一阶导数,u
α
(0)表示纵向虚拟控制率的初始值,v
α
(0)表示横向虚拟控制率的初始值,r
α
(0)表示艏向角虚拟控制率的初始值;u
f
(0)表示纵向滤波控制率的初始值,v
f
(0)表示横向滤波控制率的初始值,r
f
(0)表示艏向角滤波控制率的初始值。
[0112]
(3)由所述滤波控制率和所述实际位置信息计算虚拟误差面;所述虚拟误差面包括纵向虚拟误差、横向虚拟误差和艏向角虚拟误差。由所述滤波控制率和所述虚拟控制率计算滤波误差;所述滤波误差包括纵向滤波误差、横向滤波误差和艏向角滤波误差。具体的:
[0113]
同时将无人艇的实际速度与滤波控制率相减获得虚拟误差,将滤波控制率和虚拟控制率相减得滤波误差,如下式所示:
[0114]
s4=u
‑
u
f
,s5=v
‑
v
f
,s6=r
‑
r
f
,
[0115]
z
u
=u
f
‑
u
α
,z
v
=v
f
‑
v
α
,z
r
=r
f
‑
r
α
。
[0116]
其中s4、s5、s6构成虚拟误差面,s4为纵向虚拟误差,s5为横向虚拟误差,s6为艏向角虚拟误差;z
u
为纵向滤波误差,z
v
为横向滤波误差,z
r
为艏向角滤波误差。
[0117]
步骤104:采用径向基神经网络估计未知时变项目,得到无人艇模型;所述未知时变项目包括水动力阻尼参数、科氏加速度和向心加速度。
[0118]
步骤104,具体包括:
[0119]
在实际工作中,无人艇的水动力阻尼参数和科氏加速度、向心加速度往往很难测量,故本实施例利用径向基神经网络在线估计出系统包括水动力阻尼参数和科式加速度在内的不确定项。
[0120]
无人艇的不确定项如下:
[0121][0122]
其中,为未知时变项目,本实施例利用径向基神经网络在线估计出来这一项,从而完成无人艇的跟踪控制,其神经网络表示形式如下:
[0123][0124]
其中,为最优权重向量,θ
j
(v)=[θ1(v),...,θ
n
(v)]
t
为径向基函数向量,θ
i
(v),i=1,...,n为高斯径向基函数,其形式如下:
[0125][0126]
其中,v=[u,v,r]
t
为神经网络的输入向量,和为径向基神经网络的中心和宽度。
[0127]
通过径向基神经网络,所述无人艇模型为:
[0128][0129][0130][0131]
其中,为纵向未知时变项目估计值,为横向未知时变项目估计值,为艏向角未知时变项目估计值,为纵向权重向量估计值,为横向权重向量估计值,为艏向角权重向量估计值,θ
u
为纵向径向基函数向量,θ
v
为横向径向基函数向量,θ
r
为艏向角径向基函数向量。
[0132]
由此,步骤102中的无人艇动力学模型可以描述如下:
[0133][0134][0135][0136]
其中为径向基神经网络权重估计误差,
[0137]
步骤105:基于所述无人艇模型,对复合干扰进行估计,得到复合干扰估计值;所述复合干扰包括所述无人艇模型的估计误差和外界干扰。
[0138]
步骤105,具体包括:
[0139]
由于径向基神经网络对无人艇模型估计存在误差δ
j
,j=u,v,r,并且无人艇受到海洋中的风浪涌等干扰,故本实施例将模型估计误差和外界干扰综合考虑作为符合干扰,即:d
j
=d
j
/m
jj
δ
j
,j=u,v,r。然后将神经网络估计的无人艇模型无人艇的实际速度、控制输入等信号输入到干扰观测器中获得对复合干扰的估计值。
[0140]
首先,引入辅助变量ξ
j
,j=u,v,r,定义如下:
[0141][0142]
η
j
为干扰观测器设计参数。
[0143]
对辅助变量求导可得如下式子:
[0144][0145][0146][0147]
对辅助变量进行如下估计:
[0148][0149][0150][0151]
其中,为ξ
j
的估计值。复合干扰的估计值可以设计如下:
[0152][0153][0154][0155]
其中,为纵向复合干扰估计值,为横向复合干扰估计值,为艏向角复合干扰估计值,为纵向辅助变量估计值,为横向辅助变量估计值,为艏向角辅助变量估计值,η
u
为干扰观测器的横向参数,η
v
为干扰观测器的纵向参数,η
r
为干扰观测器的艏向角参数,u为船体坐标系下的纵向速度,v为船体坐标系下的横向速度,r为船体坐标系下的艏向角速度。
[0156]
步骤106:由所述虚拟误差面、所述滤波误差、所述无人艇模型和所述复合干扰估计值确定跟踪控制率;所述跟踪控制率用于控制无人艇的轨迹跟踪。
[0157]
所述跟踪控制率为:
[0158][0159][0160][0161]
其中,为纵向跟踪控制率,为横向跟踪控制率,为艏向角跟踪控制率,s4为纵向虚拟误差,s5为横向虚拟误差,s6为艏向角虚拟误差,为纵向未知时变项目估计值,为横向未知时变项目估计值,为艏向角未知时变项目估计值,为纵向复合干扰估计值,为横向复合干扰估计值,为艏向角复合干扰估计值,z
u
为纵向滤波误差,z
v
为横向滤波误差,z
r
为艏向角滤波误差,k
41
、k
42
、k
51
、k
52
、k
61
和k
62
均为正的设计参数。m
11
表示无人艇沿纵向方向的固有质量,m
22
表示无人艇沿横向方向的固有质量,m
33
表示无人艇沿艏向角方向的固有质量;k
41
表示无人艇在纵向方向的跟踪控制器的第一设计参数,k
42
表示无人艇在纵向方向的跟踪控制器的第二设计参数,k
51
表示是无人艇在横向方向的跟踪控制器的第一设计参数,k
52
表示无人艇在横向方向的跟踪控制器的第二设计参数,k
61
表示是无人艇在艏向角方向的跟踪控制器的第一设计参数,k
62
表示是无人艇在艏向角方向的跟踪控制器的第二设计参数;表示无人艇在纵向方向的跟踪控制器的触发阀值,表示无人艇在横向方向的跟踪控制器的触发阀值,表示无人艇在艏向角方向的跟踪控制器的触发阀值;ρ
u
表示无人艇在纵向方向的跟踪控制器的触发调节系数,ρ
v
表示无人艇在横向方向的跟踪控制器的触发调节系数,ρ
r
表示无人艇在艏向角方向的跟踪控制器的触发调节系数,λ1表示无人艇在纵向方向的低通滤波器的设计参数,λ2表示无人艇在横向方向的低通滤波器的设计参数,λ3表示在艏向角方向的低通滤波器的设计参数,sig(s4)表示s4的符号与s4的绝对值的乘积,sig(s5)表示s5的符号与s5的绝对值的乘积,sig(s6)表示s6的符号与s6的绝对
值的乘积。
[0162]
在步骤106之后,还包括:
[0163]
计算当前时刻的跟踪控制率与上一时刻的跟踪控制率的差值;判断所述差值是否大于设定值;若是,则控制执行器以所述当前时刻的跟踪控制率控制无人艇的轨迹跟踪;若否,则保持上一时刻的跟踪控制率。该步骤,具体包括:
[0164]
建立事件触发机制。利用上一触发时刻控制器输出的跟踪控制率建立事件触发机制。利用上一触发时刻控制器输出的跟踪控制率和当前时刻控制器计算所得跟踪控制率α
τ
(t)差值来判断此刻是否触发控制器。其形式如下:
[0165][0166][0167]
控制器向执行器传递的实际跟踪控制率如下:
[0168][0169][0170][0171]
其中为三个方向控制器的触发阈值。τ
j
(t),j=u,v,r是控制器实际输出的跟踪控制率。
[0172]
控制器在每一个时刻通过传感器得到的数据计算出有限时间跟踪控制率,并将其存在零阶保持器里面。控制器将该时刻计算的控制率与上一个触发时刻的控制率相比较,当该时刻的控制率α
τ
(t)减去上一触发时刻控制率的绝对值|e
j
(t)|大于某一个常值m
j
时,控制器与执行器之间的信道开启,控制率从控制器传递给执行器,从而执行器进行工作,使无人艇完成跟踪任务。无人艇跟踪系统会在t
r
时间内跟踪到期望轨迹,系统内各误差信号都保持在ω
v
内,并且跟踪误差失踪保持在有界函数ρ
i
(t),i=1,2,3内。其中t
r
和ω
v
通过下面两式可得:
[0173][0174][0175]
式中,0<θ0<1;
[0176]
[0177][0178][0179]
其中,a是低通滤波器的滤波误差引起的微小的常值;分别是纵向,横向和艏向方向上的滤波器误差上界值;d
um
,d
vm
,d
rm
分别是无人艇在纵向,横向和艏向上受到的未知干扰的上界值;λ
u
,λ
v
,λ
r
分别是纵向,横向和艏向方向上神经网络权重更新的设计参数;分别是神经网络在无人艇纵向,横向和艏向上动力估计的最佳权值,χ(t)表示包含无人艇控制系统中所有误差信号的向量,
[0180]
χ(0)是χ(t)的初始值;
[0181]
是常数对称矩阵。
[0182]
对lyapunov函数v求导,并带入本实施例提出的控制率和自适应率中,通过不等式处理可得如下函数:
[0183][0184]
式中,c1为lyapunov函数v的一次项系数,c2为lyapunov函数v的l次项系数,λ为lyapunov函数v的常数项。
[0185]
上述无人艇跟踪控制方法的控制过程如图3所示。图3显示了无人艇的控制系统。无人艇通过传感器获得无人艇的位置、姿态信息以及速度信息,根据预设轨迹计算出虚拟速度,将虚拟速度通过一阶低通滤波器,并通过神经网络和干扰观测器计算出无人艇的未知模型和所受干扰。控制器根据相关信息计算出无人艇跟踪预设轨迹所需的控制率,并放入零阶保持器,根据触发条件向执行器传输控制信号。
[0186]
下面提供了一个具体实例。
[0187]
利用cyber
‑
ship ii的参数,期望轨迹选择如下:
[0188]
0s≤t≤9s;[u
d
,v
d
,r
d
]=[3,0,0];9s<t≤30s;[u
d
,v
d
,r
d
]=[3,0,0.3]。
[0189]
外界扰动选择如下:
[0190][0191]
预设性能函数选择如下:
[0192]
ρ1(t)=(1
‑
0.1)exp(
‑
2t) 0.1;
[0193]
ρ2(t)=(1
‑
0.1)exp(
‑
2t) 0.1;
[0194]
ρ3(t)=(1
‑
0.2)exp(
‑
2t) 0.2。
[0195]
径向基神经网络的输入是v=[u,v,r]
t
。隐藏层选择7个节点,高斯函数的中心分布在[0,3]
×
[0,1.2]
×
[
‑
0.2,1.2]上,高斯函数的宽度选择为10。无人艇的初始位置选择为x(0)=
‑
0.5,y(0)=
‑
0.5,ψ(0)=0。控制器增益选择为:k
11
=5,k
12
=5,k
21
=4,k
22
=4,k
31
=9,k
32
=9,k
41
=3.5,k
42
=3.5,k
51
=6.2,k
52
=6.2,k
61
=9,k
62
=9。事件触发的固定阀值及相应参数选择为:m
u
=8,m
v
=0.5,m
r
=2;h
u
=2,h
v
=1,h
r
=2;ρ
u
=2,ρ
v
=1,ρ
r
=2。
[0196]
图4显示事件触发控制和时间触发控制下的无人艇轨迹跟踪情况。从图4中可以看出,两种控制方法都能使得无人艇跟踪预设轨迹上,事件触发控制器会比时间触发控制器使得无人艇的跟踪有较大的波动。
[0197]
图5显示两种控制策略使无人艇在x向(纵向)、y向(横向)和艏向角三个方向上的跟踪误差。从图5中可以看出两种控制器都可以使无人艇的跟踪误差收敛到零的小邻域内,并且失踪保持在预设边界ρ
i
,i=1,2,3内。但是从图5中可以看出,事件触发控制器比时间触发控制器有较大波动。
[0198]
图6的(a)
‑
(c)部分显示三个方向的控制输入,分别为在船体坐标系中的纵向方向的控制输入、横向方向的控制输入和艏向方向的控制输入。图7的(a)
‑
(c)部分显示三个方向的触发情况,分别为在船体坐标系中的纵向方向的触发情况、横向方向的触发情况和艏向方向的触发情况。从图7可以看出在本实施例设计的事件触发控制器作用下,执行器的工作次数少于时间触发控制器作用下执行器的工作次数。通过计算,在本实施例设计的控制器作用下,三个执行器在30s内工作的次数分别是3420次、1595次和4419次,执行器未触发次数分别是6580次、8405次和5581次。所以可以得出,本实施例所设计的控制器在保证控制精度的情况下能减少执行器的工作次数,从而降低执行器的磨损和消耗,并且降低了控制器到执行器之间信道的通信负担。
[0199]
图8显示本实施例设计的复合干扰观测器对外界干扰和神经网络估计误差复合误差的估计效果,其中图8的(a)
‑
(c)部分分别显示在船体坐标系中的纵向方向的干扰实际值与估计值对比、横向方向的干扰实际值与估计值的对比和艏向方向的干扰实际值与估计值的对比。从图8中可以看出,本实施例设计的控制器对复合干扰具有良好的估计效果。
[0200]
本实施例的无人艇跟踪控制方法,具有如下优点:
[0201]
针对无人艇精准跟踪,本实施例利用预设性能函数使无人艇的跟踪误差一直保持在预设的范围内,无人艇的跟踪精度得到限制,无人艇能够精准的跟上期望轨迹。从而能更好的完成一些任务,如精准测量测绘,狭窄海道通行,精确的目标跟踪等。
[0202]
针对无人艇动力学模型中的不确定参数,如水动力阻尼系数,科氏加速度,向心加速度,以及参数摄动等通过径向基神经网络进行估计,从而在控制器设计中进行补偿。
[0203]
针对海洋中的风浪流等干扰和径向基神经网络对参数估计中产生的估计误差,本实施例设计了非现行干扰观测器对这两者组成的复合干扰进行在线估计,并在控制器中得到补偿,从而使无人艇跟踪具有抵抗模型参数不确定和外界干扰的能力。
[0204]
针对某些对时间有要求的任务,本实施例设计的控制率可以使无人艇能在有限的时间内完成跟踪任务。
[0205]
针对控制器和执行器之间的信号传递负担的问题,本实施例利用事件触发机制对控制率信号的传递进行了限制,减少控制器对执行器的控制频率,从而使得控制器在较少的执行次数的同时,无人艇依旧能够精准的跟踪轨迹。
[0206]
本发明还提供了一种无人艇跟踪控制系统,图9为本发明实施例提供的无人艇跟踪控制系统的结构图。
[0207]
参见图9,本实施例的系统包括:
[0208]
信息获取模块201,用于获取无人艇的实际位置信息和期望位置信息。
[0209]
误差计算模块202,用于基于所述实际位置信息和所述期望位置信息,采用预设性能函数计算非约束跟踪误差。
[0210]
滤波模块203,用于由所述实际位置信息、所述期望位置信息和所述非约束跟踪误差计算虚拟控制率,并由所述虚拟控制率和一阶低通滤波器,得到虚拟误差面和滤波误差。
[0211]
模型估计模块204,用于采用径向基神经网络估计未知时变项目,得到无人艇模型;所述未知时变项目包括水动力阻尼参数、科氏加速度和向心加速度。
[0212]
干扰估计模块205,用于基于所述无人艇模型,对复合干扰进行估计,得到复合干扰估计值;所述复合干扰包括所述无人艇模型的估计误差和外界干扰。
[0213]
轨迹跟踪控制模块206,用于由所述虚拟误差面、所述滤波误差、所述无人艇模型和所述复合干扰估计值确定跟踪控制率;所述跟踪控制率用于控制无人艇的轨迹跟踪。
[0214]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0215]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。