1.本发明涉及垃圾投放系统领域,特别涉及一种新型的智能垃圾投放系统。
背景技术:
2.自2019年9月以来,上海市正式实行垃圾分类管理条例,将垃圾分为干、湿、可回收、有害四类垃圾,分别进行投放处理。适用于垃圾分类管理,垃圾投放系统动用了大量的人力,定时定点投放的看管人员,垃圾的运输人员以及垃圾的卸载处置人员等,处理效率较低,耗费时间长。
3.现有垃圾分类投放智能化技术大多基于大量垃圾图像数据特征得来的垃圾识别垃圾桶,可以辨认九成左右的种类垃圾,减轻了人工定点看管垃圾分类的负担。但这只是垃圾桶这个设备维度的创新,长久来看,容纳的垃圾体量较小,从整个系统的广域角度来看仍然是远远不够的。当人们对于垃圾种类辨别和分类意识已经熟悉和接受后,一个完整的系统创新显得更加重要。
4.因此,本领域的技术人员致力于开发一种可以同时克服以上所有问题。
技术实现要素:
5.有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是如何设计一种处理效率高的系统。为实现上述目的,本发明提出了一种新型的智能垃圾投放系统,包括智能垃圾运输车、集中控制系统、垃圾投放装置三部分,所述智能垃圾运输车根据使用区域的具体地图环境,设计循迹路线,并在设定位置停留等待垃圾投放,投放完毕后回到智能垃圾房进行所述垃圾投放装置的更换。
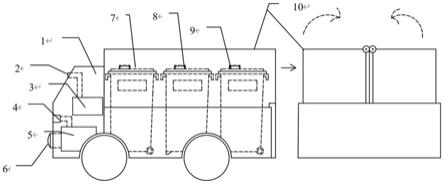
6.进一步地,所述智能垃圾运输车主要由车体、摄像头、智能检测模块盒、充电口,动力模块盒、照明灯、可回收垃圾桶、干垃圾桶、湿垃圾桶、厢盖组成,具备线路循迹、行人检测、自主控制运行状态、自动开启照明、自动开启所述车厢盖功能。
7.进一步地,所述集中控制系统由一个中心控制板和两个分模块组成,第一个是智能垃圾运输车的控制模块,第二个是所述智能垃圾房当中机械抓取机器人的控制模块。
8.进一步地,所述智能垃圾运输车的控制模块是由循迹避障模块,驱动控制模块,车厢开闭控制模块,倒计时模块,夜间照模块,电源管理模块,几个辅助信号采集装置和上位机所组成;其中所述驱动控制模块、所述车厢盖开闭控制模块、所述电源管理模块属于所述动力模块盒,其余属于所述智能检测模块盒。
9.进一步地,所述智能垃圾运输车沿着所述循迹路线运行,到达规定位置时停靠,自动打开所述车厢盖,露出车体内垃圾桶便于投放,同时触发计时功能,达到规定时间后,自动关闭所述车厢盖,并行进到下一投放点;垃圾桶有三种类型,绿色的所述可回收垃圾桶、蓝色的所述干垃圾桶和红色所述湿垃圾桶所述可回收垃圾桶和所述干垃圾桶保持常开,所述湿垃圾桶持常闭,感触到有人投放垃圾时自动打开;每个垃圾桶安装激光传感器,当某个垃圾桶装满时,系统会报警,并自动关闭所述车厢盖,然后返回所述智能垃圾房更换垃圾
桶,如此循环,直到完成整个路线。
10.进一步地,所述智能垃圾房中完成所述智能垃圾运输车上垃圾桶的更换以及所述智能垃圾运输车和机械抓取机器人的充电。
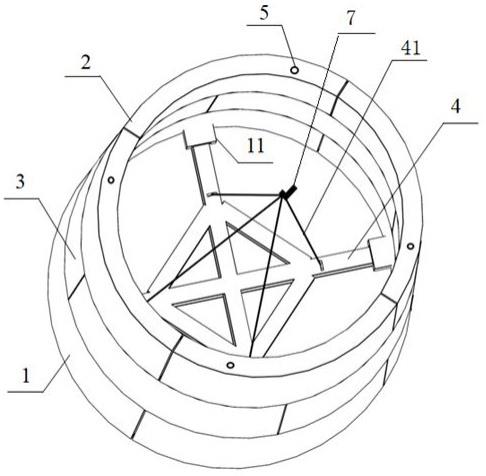
11.进一步地,所述机械抓取机器人包括通用机械臂、图像识别模块和专用机械手等部分组成;所述机械臂下端固定在移动装置上,所述移动装置内部安放机器人中心控制模块,以及充电插口;所述机械臂上端连接所述专用机械手,其结构为叉形手臂结构,所述叉形手臂两侧的距离尺寸依据垃圾桶的宽来设计,所述图像识别模块设置在所述叉形手臂一侧上,通过移动叉形手臂装卡在垃圾桶两边的勾状结构,实现对垃圾桶的移动。
12.进一步地,垃圾桶移动步骤如下,首先,所述专用机械手搭载的所述底部移动装置通过视觉循迹到达所述智能形式垃圾运输车停靠作业点处,所述智能垃圾运输车停靠到指定位置后,所述专用机械手依靠视觉检测完成目标垃圾桶的定位,所述图像识别模块可以通过颜色判断三种类型垃圾桶存放的具体位置,然后反馈给所述机械臂,所述底部移动装置按照作业路线将其运输到对应下物区放下,利用所述专用机械手进行卸载,并依照相同逻辑更换上空的垃圾桶。
13.进一步地,所述垃圾投放装置,是指智能行驶垃圾运输车所放置的垃圾投放装置,采用专用色彩喷涂的“干垃圾”、“湿垃圾”、“可回收”字样以提高它们的辨识度;结构和目前所使用的垃圾桶相近,在接近桶盖的部分增加了给所述机械臂抓取使用的突出结构,增厚了湿垃圾投放装置,保障湿垃圾不会泄露;每辆车放置6个桶,不同种类桶车体两侧各一个,满足大容量的垃圾。
14.进一步地,所述投放系统中的管理人员在办公室pc端上位机远程监控所述智能垃圾运输车和所述智能垃圾房中的所述机械抓取机器人是否故障情况;在非作业期间对其进行维护和充电;在使用前对所述循迹路线做排查,尽量去除在所述循迹路线里的静态障碍物。
15.与现有技术相比,本发明具有如下的有益效果:
16.由于其系统自动化,智能化与远程监测的特性可以使得垃圾分类管理实施的人力成本得到大大的降低,在一个区域里只需要保留将垃圾房的垃圾运输离开的人员和整体系统的管理人员,减少了季节与天气因素对于垃圾投放管理人员的实施难度。
17.垃圾管理变得更加系统化,并且在不同的区域适用性、可变换性高。
18.由于降低了人员参与度,满足了居民对于增加垃圾投放地点和延长时间的需求。根据垃圾投放的高峰和低峰时段进行停留时间的调整,并且减少了垃圾投放的距离,使得垃圾分类投放政策更加人性化。
19.以下对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
附图说明
20.图1为本发明实施例的智能垃圾车简易示意图;
21.其中,1车体,2摄像头,3智能检测模块盒,4充电口,5动力模块盒,6照明灯,7可回收垃圾桶,8干垃圾桶,9湿垃圾桶,10车厢盖;
22.图2为本发明实施例的智能垃圾运输车控制系统;
23.图3为本发明实施例的智能装卸机器人示意图;
24.其中,11图像识别模块,12叉型手,13通用机械臂,14充电口,15移动装置,16中心控制模块;
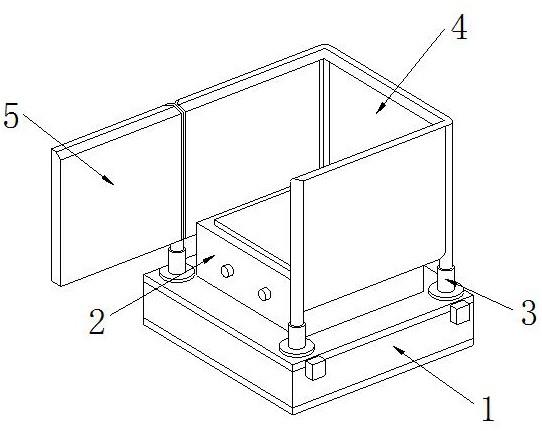
25.图4为发明实施例的智能垃圾房内部分布图;
26.其中,17装卸机器人作业处,18垃圾车停靠区,19充电区域,20机器人移动路线,21机械臂作业处,22可回收垃圾桶存放处,23湿垃圾桶存放处,24干垃圾桶存放处;
27.图5为发明实施例的区域环境示意图;
28.其中,25居民楼,26停靠点,27循迹路线,28智能垃圾房。
具体实施方式
29.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
30.如图1
‑
5所示,选取一个居民小区作为实施地,小区按照楼房的排布特点在地面标固定的行驶路线,设立停四个靠点26。各点设立停车特征图像,路线由两条平行的黑实线表示。
31.垃圾运输车时间点设置为6
‑
9点、11
‑
14点、17
‑
20点为运行时间,开到停靠点停留30分钟后前往下一个点。正常行驶时,车速在小区内不超过5公里每小时。这里根据区域的大小和居民数决定投放两台循迹垃圾运输车,交替进行垃圾的收集和运输。智能运输车根据垃圾的运输重量和尺寸选取市面上合适的商用运输车改装而成。
32.工业机械臂选用末端负载满足垃圾桶重量约240kg的机械臂,以及适合投放装置尺寸的叉形手。
33.智能垃圾车装载着干,湿,可回收三种共六个垃圾投放装置,非工作时间时停靠在充电区域19进行插电充电,工作时间智能垃圾车驶出垃圾房,摄像头识别循迹黑实线保持运行。当识别到停车特征图像时,停止行驶,同时触发车厢盖10的开启并开始30分钟的倒计时,在此期间居民投放垃圾。一次投放结束后,关闭车厢盖10,并继续循迹黑线进入下一个停车点。当第一辆车到达第三个停靠点时,第二辆车开始行驶出垃圾房工作,按照同一方向,进入第一个停车点。
34.当遇到紧急情况,如行人冲撞,或障碍物拦截,则摄像头识别出正前方的人或障碍物后及时停车,待人离开后,继续行驶。
35.当遇到夜晚光线较暗无法正常循迹时,摄像头将光照不足信息返回到中心控制器,打开照明灯。
36.当垃圾车正常运行结束回到垃圾房时,在垃圾房左侧自上而下进入停靠点18,并打开车厢盖8,右侧是装卸机器人的停靠作业点17。装卸机器人依靠视觉检测颜色及垃圾桶的外形特征完成目标垃圾桶7、垃圾桶8、垃圾桶9的定位,用叉型手12分别运输下车上垃圾桶7、垃圾桶8、垃圾桶9。控制器根据图像识别模块检测出的对应颜色,控制移动装置23沿路线16去不同种垃圾桶更换区域的作业点22、作业点23、作业点24,并换上空桶。
37.当遇到途中垃圾满桶的情况,激光传感器将满桶信息传达给中心控制器,垃圾车
将提示关闭车厢盖,车辆不再停靠,直接行驶到垃圾房停靠点18,进行垃圾桶的更换。
38.(一)作业全部结束后垃圾车运行到充电区19,工作人员插上充电插头,进行充电与维护。
39.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。