1.本发明涉及交通管理技术领域,尤其是涉及一种基于无人机辅助的车载无线自组网路由控制方法。
背景技术:
2.随着汽车市场的快速发展,交通拥挤控制成为一个热门的研究领域。车载自组织网(vanets)已成为与道路安全相关的众多应用领域的核心研究技术。由于节点具有较高的移动性和有限的传输距离,因而导致通信中断,在道路拥挤控制中一直是一个较为严重的问题。而传统路由协议仅依赖于基于路侧单元(rsu)的网络,无法很好应对道路拥挤场景。因此还亟需一种新路由控制方法,能提高数据包的传输速率,从而增强基于交叉路口的路由灵活性。
技术实现要素:
3.本发明的目的就是为了克服上述现有技术存在的仅依赖于基于rsu的网络,无法很好应对道路拥挤场景的缺陷而提供一种基于无人机辅助的车载无线自组网路由控制方法。
4.本发明的目的可以通过以下技术方案来实现:
5.一种基于无人机辅助的车载无线自组网路由控制方法,车载无线自组网中包括多个路侧单元作为源节点,所述无人机作为辅助节点与路侧单元连接,具体包括以下步骤:
6.s1、采集道路交叉口中的实时交通信息;
7.s2、根据所述实时交通信息建立车辆、路侧单元和无人机之间的路由路径;
8.s3、路侧单元之间进行数据交互,判断道路交叉口是否发生交通拥堵,若是则重新规划车辆与路侧单元之间的路由路径,否则选择车辆与路侧单元之间的最短路由路径作为最终的路由路径。
9.所述路侧单元之间通过蜂窝网络进行通信,解决网络在宕机或受到任何其他来源的攻击,网络就不能正常工作的问题,并且降低部署成本。
10.进一步地,所述无人机通过所述蜂窝网络与路侧单元进行通信,在发生不确定拥堵时,有助于增强和增加道路交叉口的rsu的通行能力和通信范围。
11.进一步地,所述路由路径的类型包括车辆与无人机之间的路由路径、车辆与路侧单元之间的路由路径、蜂窝网络与路侧单元之间的路由路径、无人机与路侧单元之间的路由路径,以及蜂窝网络之间的路由路径。
12.所述路侧单元之间设有交通信息共享机制来对采集的实时交通信息进行数据交互。
13.所述路侧单元设为路由路径的源节点,所述车辆设为路由路径的目标节点。
14.进一步地,所述路侧单元中设有路由表,所述路由表中记录有相应车辆作为目标节点的路由信息及对应的路由路径。
15.进一步地,所述步骤s3中重新规划车辆与路侧单元之间的路由路径具体包括修改路由表,选择到达目标节点的第二短的路由路径。
16.所述车辆与路侧单元之间的最短路由路径通过迪克斯特拉最短路径规划算法计算得到。
17.所述路侧单元在判断发生拥堵时会将实时交通信息更新到整个车载无线自组网。
18.与现有技术相比,本发明具有以下有益效果:
19.本发明仅需在道路交叉口部署路侧单元,路侧单元均通过现有的蜂窝网络连接,解决传统协议部署成本高,无法快速定位异常节点的问题,当道路交叉口出现拥堵或阻塞的情况时,通过无人机作为辅助节点进行辅助通信,帮助路侧单元重新规划路由路径,显著提高了数据包的发送率,有效降低了端到端时延,提高了平均吞吐量和瞬时吞吐量,提高了道路交叉口拥堵时路侧单元的处理能力,保证了道路交叉口中车辆的正常运行。
附图说明
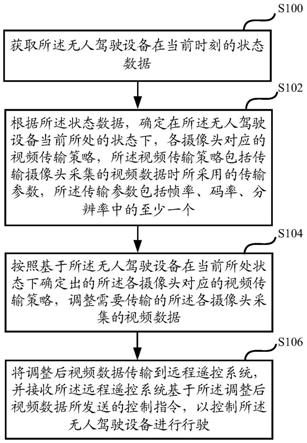
20.图1为本发明的流程示意图;
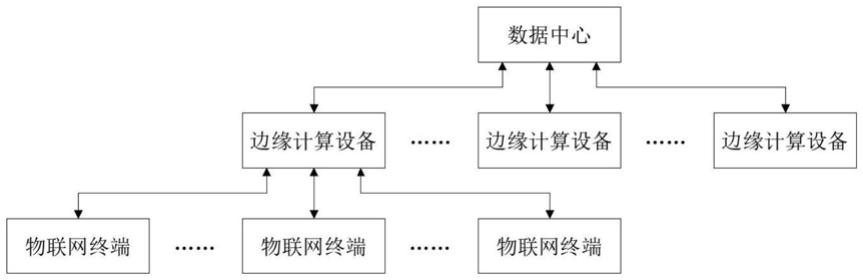
21.图2为本发明实施例中路侧单元与无人机的布局示意图。
具体实施方式
22.下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
23.实施例
24.如图1所示,一种基于无人机辅助的车载无线自组网路由控制方法,车载无线自组网中包括多个路侧单元作为源节点,无人机作为辅助节点与路侧单元连接,具体包括以下步骤:
25.s1、采集道路交叉口中的实时交通信息;
26.s2、根据实时交通信息建立车辆、路侧单元和无人机之间的路由路径;
27.s3、路侧单元之间进行数据交互,判断道路交叉口是否发生交通拥堵,若是则重新规划车辆与路侧单元之间的路由路径,否则选择车辆与路侧单元之间的最短路由路径作为最终的路由路径。
28.路侧单元之间通过蜂窝网络进行通信,解决网络在宕机或受到任何其他来源的攻击,网络就不能正常工作的问题,并且降低部署成本。
29.无人机通过蜂窝网络与路侧单元进行通信,在发生不确定拥堵时,有助于增强和增加道路交叉口的rsu的通行能力和通信范围。
30.路由路径的类型包括车辆与无人机之间的路由路径、车辆与路侧单元之间的路由路径、蜂窝网络与路侧单元之间的路由路径、无人机与路侧单元之间的路由路径,以及蜂窝网络之间的路由路径。
31.路侧单元之间设有交通信息共享机制来对采集的实时交通信息进行数据交互。
32.路侧单元设为路由路径的源节点,车辆设为路由路径的目标节点。
33.路侧单元中设有路由表,路由表中记录有相应车辆作为目标节点的路由信息及对
应的路由路径。
34.步骤s3中重新规划车辆与路侧单元之间的路由路径具体包括修改路由表,选择到达目标节点的第二短的路由路径。
35.车辆与路侧单元之间的最短路由路径通过迪克斯特拉最短路径规划算法计算得到。
36.路侧单元在判断发生拥堵时会将实时交通信息更新到整个车载无线自组网。
37.具体实施时,如图2所示,当出现拥堵等紧急情况,当前的交通信息立即更新到整个车载无线自组网。控制室会立即采取行动,发射一架无人机飞到拥堵的道路交叉口,无人机将协助该拥堵的道路交叉口的rsu增强该交叉口的覆盖范围,以避免新的拥堵和源节点到目标节点之间的固定路由中断。通过使用路由表,源节点可以再次修改路由,源节点可以选择到达目的地的第二短的路由路径。对于其他任何道路交叉口的不确定的拥塞或阻塞,如rsu监控的丢包率很高,或者某道路交叉口节点数一次超过50个。在这种情况下,特定的道路交叉口的rsu将广播紧急消息,要求在特定的道路交叉口部署无人机,控制室收到交叉口紧急信息后,在特定交叉口部署无人机,协助该道路交叉口的rsu增强覆盖范围。
38.此外,需要说明的是,本说明书中所描述的具体实施例,所取名称可以不同,本说明书中所描述的以上内容仅仅是对本发明结构所做的举例说明。凡依据本发明构思的构造、特征及原理所做的等效变化或者简单变化,均包括于本发明的保护范围内。本发明所属技术领域的技术人员可以对所描述的具体实例做各种各样的修改或补充或采用类似的方法,只要不偏离本发明的结构或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。
技术特征:
1.一种基于无人机辅助的车载无线自组网路由控制方法,车载无线自组网中包括多个路侧单元作为源节点,所述无人机作为辅助节点与路侧单元连接,其特征在于,具体包括以下步骤:s1、采集道路交叉口中的实时交通信息;s2、根据所述实时交通信息建立车辆、路侧单元和无人机之间的路由路径;s3、路侧单元之间进行数据交互,判断道路交叉口是否发生交通拥堵,若是则重新规划车辆与路侧单元之间的路由路径,否则选择车辆与路侧单元之间的最短路由路径作为最终的路由路径。2.根据权利要求1所述的一种基于无人机辅助的车载无线自组网路由控制方法,其特征在于,所述路侧单元之间通过蜂窝网络进行通信。3.根据权利要求2所述的一种基于无人机辅助的车载无线自组网路由控制方法,其特征在于,所述无人机通过所述蜂窝网络与路侧单元进行通信。4.根据权利要求3所述的一种基于无人机辅助的车载无线自组网路由控制方法,其特征在于,所述路由路径的类型包括车辆与无人机之间的路由路径、车辆与路侧单元之间的路由路径、蜂窝网络与路侧单元之间的路由路径、无人机与路侧单元之间的路由路径,以及蜂窝网络之间的路由路径。5.根据权利要求1所述的一种基于无人机辅助的车载无线自组网路由控制方法,其特征在于,所述路侧单元之间设有交通信息共享机制来对采集的实时交通信息进行数据交互。6.根据权利要求1所述的一种基于无人机辅助的车载无线自组网路由控制方法,其特征在于,所述路侧单元设为路由路径的源节点,所述车辆设为路由路径的目标节点。7.根据权利要求6所述的一种基于无人机辅助的车载无线自组网路由控制方法,其特征在于,所述路侧单元中设有路由表,所述路由表中记录有相应车辆作为目标节点的路由信息及对应的路由路径。8.根据权利要求7所述的一种基于无人机辅助的车载无线自组网路由控制方法,其特征在于,所述步骤s3中重新规划车辆与路侧单元之间的路由路径具体包括修改路由表,选择到达目标节点的第二短的路由路径。9.根据权利要求1所述的一种基于无人机辅助的车载无线自组网路由控制方法,其特征在于,所述车辆与路侧单元之间的最短路由路径通过迪克斯特拉最短路径规划算法计算得到。10.根据权利要求1所述的一种基于无人机辅助的车载无线自组网路由控制方法,其特征在于,所述路侧单元在判断发生拥堵时会将实时交通信息更新到整个车载无线自组网。
技术总结
本发明涉及一种基于无人机辅助的车载无线自组网路由控制方法,车载无线自组网中包括多个路侧单元作为源节点,无人机作为辅助节点,具体包括以下步骤:S1、采集道路交叉口中的实时交通信息;S2、根据实时交通信息建立车辆、路侧单元和无人机之间的路由路径;S3、路侧单元之间进行数据交互,判断道路交叉口是否发生交通拥堵,若是则重新规划车辆与路侧单元之间的路由路径,否则选择车辆与路侧单元之间的最短路由路径作为最终的路由路径。与现有技术相比,本发明具有解决传统协议部署成本高,无法快速定位异常节点的问题,提高数据包的发送率,降低端到端时延,提高平均吞吐量和瞬时吞吐量,提高道路交叉口拥堵时路侧单元的处理能力等优点。力等优点。力等优点。
技术研发人员:张义红 窦郭庆 简叶 秦常帅 王子枭 金孟宇 李德敏 李帅 姜诗高
受保护的技术使用者:东华大学
技术研发日:2021.08.09
技术公布日:2021/11/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。