1.本发明涉及一种教学系统,更确切地说是一种基于机器视觉应用的教学系统。
背景技术:
2.在教育学生技术知识,通常需要让学生了解产品制造过程,以便于学生对技术原理以及产品制造过程有直观的了解。现有让学生了解产品制造过程通常是将学生带到工厂的生产现场进行实习观摩,由于生产现场为根据实际产品设置,与教学内容可能并不相符合,影响教学效果。而且,需要组织学生去工厂,需要协调工厂接待能力和时间,花费时间和精力多,教学效率低。因此,急需开发一种可对产品制造进行演示的教学系统。
技术实现要素:
3.本发明为了解决现有技术教学过程中,学生只能到工厂的生产现场进行实习观摩,影响教学效果和教学效率的技术问题,提供了一种基于机器视觉应用的教学系统。
4.为解决上述技术问题,本发明采用的技术方案为设计一种基于机器视觉应用的教学系统,包括:
5.机架,所述机架上设置有支撑台;
6.机器视觉演示工位,其包括多个且首尾依次排列设置于所述支撑台上,各所述机器视觉演示工位包括设于所述支撑台上用于放置演示工件的工作台和设于所述支撑台上用于采集演示工件图像数据的视觉装置;
7.传送装置,其用于搬运所述演示工件以将各机器视觉演示工位连贯在一起;
8.控制装置,其与所述视觉装置、传送装置相连,且控制所述视觉装置和传送装置。
9.所述基于机器视觉应用的教学系统还包括连接在首尾视觉演示工位之间的复位工位,所述传送装置包括设于所述机器视觉演示工位一侧的传送导轨和设于所述传送导轨上且可沿所述传送导轨运动的传送机械手,所述传送装置和所述复位工位将多个所述机器视觉演示工位连贯成循环。
10.所述机器视觉演示工位中的一个为扫码演示工位,且所述扫码演示工位与所述复位工位相邻,所述视觉装置包括用于识别条码的视觉识别相机和用于识别条码的扫码器,所述工作台为扫码工作台,;
11.所述扫码演示工位还包括:
12.第一支架,其设于所述支撑台上;
13.第一x轴导轨,其设于所述第一支架上;所述视觉识别相机和所述扫码器沿x轴方向排列设置于所述第一x轴导轨上且可相对所述第一x轴导轨沿x轴方向运动;
14.第一y轴导轨,其设于所述机架上,且连接所述复位工位和扫码演示工位,所述扫码工作台设于所述第一y轴导轨上且可沿所述第一y轴导轨在所述扫码演示工位和复位工位之间运动。
15.所述机器视觉演示工位中的一个为机器视觉线扫工位,所述工作台为线扫工作
台,所述视觉装置为线扫相机;所述机器视觉线扫工位包括:
16.第二支架,其设于所述支撑台上;
17.第二x轴导轨,其设于所述第二支架上;
18.第二z轴导轨,其设于所述第二x轴导轨上且可相对所述第二x轴导轨沿x轴方向运动;所述线扫相机设于所述第二z轴导轨上且可相对所述第二z轴导轨沿z轴方向运动;
19.第二y轴导轨,其设于所述支撑台上,所述线扫工作台设于所述第二y轴导轨上且可相对所述第二y轴导轨沿y轴方向运动。
20.所述机器视觉演示工位中的一个为机器视觉引导点胶工位,所述工作台为点胶工作台,所述视觉装置为3d相机,所述机器视觉引导点胶工位包括:
21.点胶演示头;
22.第三支架,其设于所述支撑台上;
23.第三x轴导轨,其设于所述第三支架上;
24.第三z轴导轨,其设于所述第三x轴导轨上且可相对所述第三x轴导轨沿x轴方向运动;所述3d相机和点胶演示头设于所述第三z轴导轨上且可相对所述第三z轴导轨沿z轴方向运动;所述控制装置控制所述3d相机采集演示工件上需要点胶的部位的图像数据,并根据所述图像数据规划路径指引所述点胶演示头点胶;
25.第三y轴导轨,其设于所述支撑台上,所述点胶工作台设于所述第三y轴导轨上且可相对所述第三y轴导轨沿y轴方向运动;所述点胶工作台还设置有一沿xy平面旋转的旋转台。
26.所述机器视觉演示工位中的一个为飞拍工位,所述工作台为飞拍工作台,所述视觉装置为飞拍相机,所述飞拍工位包括:
27.第四支架,其设于所述支撑台上;
28.第四x轴导轨,其设于所述第四支架上;所述飞拍相机设于所述第四x轴导轨上且可相对所述第四x轴导轨沿x轴方向运动;
29.第四y轴导轨,其设于所述支撑台上,所述飞拍工作台设于所述第四y轴导轨上且可相对所述第四y轴导轨沿y轴方向运动。
30.所述机器视觉演示工位中的一个为机器人贴合转移工位,所述工作台为飞拍工作台,所述传送装置包括第一贴合机械手,所述第一贴合机械手上设置有第一贴合吸盘,所述视觉装置包括:
31.第一贴合相机,其设于所述支撑台上;
32.第二贴合相机,其设于所述第一贴合机械手上且随所述第一贴合机械手一起运动;所述第一贴合机械手抓取待贴合工件至所述第一贴合相机上方,所述第一贴合相机拍摄待贴合工件获取第一贴合数据,再移动至所述飞拍工作台上方,所述第二贴合相机拍摄待贴合位置处获取第二贴合数据,所述控制装置根据所述第一贴合数据和第二贴合数据引导所述第一贴合机械手将所述待贴合工件贴合于待贴合位置。
33.所述机器视觉演示工位中的一个为多功能贴合工位,所述工作台为多功能工作台,所述视觉装置包括第三贴合相机和第四贴合相机,其中第三贴合相机固定在机架上;
34.所述多功能贴合工位包括:
35.第五支架,其设于所述支撑台上;
36.第五x轴导轨,其设于所述第五支架上;
37.第五z轴导轨,其设于所述第五x轴导轨上且可相对所述第五x轴导轨沿x轴方向运动;
38.第二贴合机械手,其设于所述第五z轴导轨上且可相对所述第五z轴导轨沿z轴方向运动;所述第四贴合相机固定在第二贴合机械手上;
39.第五y轴导轨,其设于所述支撑台上,所述多功能工作台设于所述第五y轴导轨上且可相对所述第五y轴导轨沿y轴方向运动;所述多功能工作台包括分离四轴平台和uvw平台。
40.所述机器视觉演示工位中的一个为多相机贴合工位,所述视觉装置包括多个相机,所述工作台为可沿xy平面旋转的旋转工作台,所述多相机贴合工位包括:
41.第六支架,其设于所述支撑台上;
42.第六x轴导轨,其设于所述第六支架上;
43.第六z轴导轨,其设于所述第六x轴导轨上且可相对所述第六x轴导轨沿x轴方向运动;
44.第三贴合机械手,其设于所述第六z轴导轨上且可相对所述第六z轴导轨沿z轴方向运动;所述视觉装置固定在第三贴合机械手上;
45.第六y轴导轨,其设于所述支撑台上,所述旋转工作台设于所述第六y轴导轨上且可相对所述第六y轴导轨沿y轴方向运动;
46.所述控制装置控制所述第三贴合机械手抓取待贴合工件,所述多个相机分别拍摄待贴合位置的四周以获取贴合位置参数,并根据所述贴合位置参数实时调整所述旋转工作台旋转和移动至所述第三贴合机械手的待贴合工件下方后贴合所述待贴合工件于所述待贴合位置。
47.所述机器视觉演示工位中的一个为自动光学检测工位,所述工作台为检测工作台,所述视觉装置为检测相机,所述自动光学检测工位包括:
48.第七支架,其设于所述支撑台上;
49.第七x轴导轨,其设于所述第七支架上;
50.第七z轴导轨,其设于所述第七x轴导轨上且可相对所述第七x轴导轨沿x轴方向运动;所述检测相机设于所述第七z轴导轨上且可相对所述第七z轴导轨沿z轴方向运动;
51.第七y轴导轨,其设于所述支撑台上,所述检测工作台设于所述第七y轴导轨上且可相对所述第七y轴导轨沿y轴方向运动。
52.所述基于机器视觉应用的教学系统还包括:
53.显示屏,其设于机架上且分别与各机器视觉演示工位一一对应设置;
54.所述控制装置包括多个可相互独立控制的子控制装置和与各所述子控制装置相连以选择相应的子控制装置的选择装置,所述子控制装置与所述各机器视觉演示工位一一对应;所述选择装置包括鼠标、键盘或触摸屏。
55.本发明通过设置多个机器视觉演示工位,在各机器视觉演示工位上设置视觉装置,并利用传送装置将各机器视觉演示工位连贯在一起。从而使得在教学时,不再需要到工厂的生产现场进行实习观摩,而且可以结合不同的知识点设置不同的机器视觉演示工位,提高了教学效果和教学效率。
附图说明
56.下面结合实施例和附图对本发明进行详细说明,其中:
57.图1是本发明的结构图;
58.图2是本发明的另一视角的结构图;
59.图3是本发明去掉上架体后的结构图;
60.图4是本发明去掉上架体后的另一视角的结构图;
61.图5是图3中a处的放大图;
62.图6是图3中b处的放大图;
63.图7是图3中c处的放大图;
64.图8是图3中d处的放大图;
65.图9是图3中e处的放大图;
66.图10是图4中f处的放大图;
67.图11是图4中g处的放大图;
68.图12是图4中h处的放大图;
69.图13是图4中i处的放大图;
70.图14是图4中j处的放大图。
具体实施方式
71.下面结合附图进一步阐述本发明的具体实施方式:
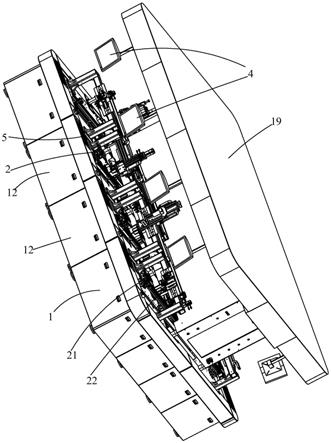
72.请参见图1至图14。本发明基于机器视觉应用的教学系统包括机架1、机器视觉演示工位2、控制装置(图中未示出)、传送装置3和显示屏4。其中:
73.机架1包括多个支撑台11。在本具体实施例中,支撑台11设置成相同,支撑台11设置成相同主要是便于可以将任一机器视觉演示工位安装在任一支撑台上,便于根据实际教学需要更换机器视觉演示工位。
74.在本具体实施例中,所述机架1包括若干个相同的可相互拼接在一起的子机架12,各所述支撑台11分别一一对应设置于各所述子机架12上。从而可在更换时直接更换子机架,更换更加快捷。
75.机器视觉演示工位2设于机架上,且包括多个。各所述机器视觉演示工位2分别一一对应设于所述支撑台11上;所述机器视觉演示工位2包括设于所述支撑台上的工作台21和设于所述支撑台上的视觉装置22。
76.显示屏4也包括多个,其分别设于各所述子机架上且分别与各机器视觉演示工位一一对应设置。显示屏主要用于显示操作界面、教学内容等。在本具体实施例中,机架1设有上架体19,显示屏4连接于上架体19侧面。
77.控制装置用于控制所述机器视觉演示工位。在本具体实施例中,所述控制装置包括多个可相互独立控制的子控制装置和与各所述子控制装置相连以选择相应的子控制装置的选择装置5,所述子控制装置与所述各机器视觉演示工位一一对应。所述选择装置包括鼠标、键盘或触摸屏。在本具体实施例中,选择装置5包括鼠标51和键盘52。
78.传送装置3用于搬运所述演示工件以将各所述机器视觉演示工位连贯在一起。在本具体实施例中,所述传送装置3包括设于各所述机器视觉演示工位一侧的传送导轨31和
设于所述传送导轨上且可沿所述传送导轨运动的传送机械手32。
79.在本具体实施例中,所述机器视觉演示工位分别为依次连接的扫码演示工位91、机器视觉线扫工位92、机器视觉引导点胶工位93、飞拍工位94、机器人贴合转移工位95、多功能贴合工位96、多相机贴合工位97和自动光学检测工位98。
80.当然,根据实际教学需要,可以对各机器视觉演示工位的顺序进行调整。
81.为便于实现循环演示,所述基于机器视觉应用的教学系统还包括复位工位6,复位工位用于将演示工件复位到原始状态。复位工位6连接在所述扫码演示工位和自动光学检测工位之间。所述控制装置与所述视觉装置、传送装置相连,且控制所述视觉装置和传送装置。所述传送装置和所述复位工位将多个所述机器视觉演示工位连贯成循环。
82.复位工位6包括复位支架61、x轴复位导轨62、z轴复位导轨63和复位机械手64。复位支架61固定在支撑台上,x轴复位导轨支撑与两复位支架之间,z轴复位导轨63设于x轴复位导轨上且可沿x轴复位导轨在x轴方向运动,复位机械手设置于z轴复位导轨上且可沿z轴复位导轨在z轴方向运动。
83.所述扫码演示工位91的视觉装置包括用于识别条码的视觉识别相机911和用于识别条码的扫码器912,所述扫码演示工位的工作台为扫码工作台913;
84.所述扫码演示工位91还包括第一支架914、第一x轴导轨915、第一y轴导轨916。其中:
85.第一支架914设于所述支撑台上。
86.第一x轴导轨915设于所述第一支架上;所述视觉识别相机911和所述扫码器912沿x轴方向排列设置于所述第一x轴导轨上且可相对所述第一x轴导轨沿x轴方向运动;
87.第一y轴导轨916设于所述机架上,且连接所述复位工位和扫码演示工位,所述扫码工作台设于所述第一y轴导轨上且可沿所述第一y轴导轨在所述扫码演示工位和复位工位之间运动。
88.为便于描述,在本具体实施例中的演示工件为手机壳体81、手机屏幕82和电路卡83。手机壳体81、手机屏幕82和电路卡83放置在冶具84上。演示工件在转移至下一工位时,都是跟冶具84一起转移。在本具体实施例中,开机时,扫码工作台913处于复位工位处,先将手机壳体81、手机屏幕82和电路卡83放置于扫码工作台913。控制装置驱动扫码工作台913沿第一y轴导轨916运动至扫码演示工位处,然后视觉识别相机911和扫码器912开始对演示工件扫码,扫码过程中,扫码工作台913沿第一y轴导轨916运动,以将演示工件置于视觉识别相机911和扫码器912下方。视觉识别相机911和扫码器912扫码获得的数据传送至控制器。
89.扫码演示工位可演示同时对多个物体进行扫码识别,并在系统内部建立起产品数据库。便于对后续产品进行产品生产追溯。扫码演示工位可支持的实训课程包括一维条码识别、二维码识别、电子元件插针引脚测量、线弧测量及标定、牛奶瓶字符识别、齿轮上下端面缺陷检测等。
90.所述机器视觉线扫工位92的工作台为线扫工作台921,所述机器视觉线扫工位的视觉装置为线扫相机922;所述机器视觉线扫工位92包括第二支架923、第二x轴导轨924、第二z轴导轨925、第二y轴导轨926。其中:
91.第二支架923设于所述支撑台上;
92.第二x轴导轨924设于所述第二支架上;
93.第二z轴导轨925设于所述第二x轴导轨上且可相对所述第二x轴导轨沿x轴方向运动;所述线扫相机922设于所述第二z轴导轨上且可相对所述第二z轴导轨沿z轴方向运动;
94.第二y轴导轨926设于所述支撑台上,所述线扫工作台设于所述第二y轴导轨上且可相对所述第二y轴导轨沿y轴方向运动。
95.扫码演示工位完成后,传送装置的传送机械手将演示工件抓取起来,并沿传送导轨将演示工件送至机器视觉线扫工位的线扫工作台921上。机器视觉线扫工位的线扫相机922对演示工件进行扫描,在扫描过程中,线扫工作台921沿第二y轴导轨926运动。在此过程中,线扫相机还可根据具体情况在x轴和z轴方向运动。扫描获得的数据传送至控制装置进行处理。
96.机器视觉线扫工位采用一套高精度的线扫相机,配合精密的运动轴,完成对中框特定区域特征的图像数据采集和处理;单机操作时可以通过更换冶具、相机、镜头、光源等,实现对不同产品的测量。机器视觉线扫工位可支持的实训课题包括硬币计数、标签打印质量检测、纸盒图标定位检测、电池标签位置检测、玻璃贴膜气泡检测、纸杯合缝检测等。
97.所述机器视觉引导点胶工位93的工作台为点胶工作台931,所述机器视觉引导点胶工位的视觉装置为3d相机932,所述机器视觉引导点胶工位93包括点胶演示头933、第三支架934、第三x轴导轨935、第三z轴导轨936、第三y轴导轨937。其中:
98.点胶演示头933仅为演示,实际演示过程中并不真的点胶;
99.第三支架934设于所述支撑台上;
100.第三x轴导轨935设于所述第三支架上;
101.第三z轴导轨936设于所述第三x轴导轨上且可相对所述第三x轴导轨沿x轴方向运动;所述3d相机932和点胶演示头933设于所述第三z轴导轨上且可相对所述第三z轴导轨沿z轴方向运动;所述控制装置控制所述3d相机采集演示工件上需要点胶的部位的图像数据,并根据所述图像数据规划路径指引所述点胶演示头点胶;
102.第三y轴导轨937设于所述支撑台上,所述点胶工作台设于所述第三y轴导轨上且可相对所述第三y轴导轨沿y轴方向运动;所述点胶工作台还设置有一沿xy平面旋转的旋转台。
103.机器视觉线扫工位完成后,传送装置的传送机械手将演示工件抓取起来,并沿传送导轨将演示工件送至机器视觉引导点胶工位的点胶工作台931上。机器视觉引导点胶工位中,先利用3d相机采集演示工件上需要点胶的部位的图像数据,如手机壳体四周的图像数据。在采集过程中,点胶工作台在xy平面内旋转,同时点胶工作台沿第三y轴导轨937运动,3d相机932和点胶演示头933则根据情况沿x轴和z轴方向运动,以便于图像数据的采集,采集好的图像数据被传送至控制装置,控制装置根据所述图像数据规划路径指引所述点胶演示头点胶。点胶过程中,点胶工作台和点胶演示头也根据规划好的路径运动。
104.机器视觉引导点胶工位配备了3d相机视觉引导和四轴运动系统,可对手机壳体与手机屏幕贴合部位需要进行点胶的部位进行图像数据采集和路径规划。单机操作时,可通过更换冶具、3d相机,实现对不同产品进行测量。机器视觉引导点胶工位可支持的实训课题包括:pcb基板检测、发光二极管引脚质量检测、注塑栅格披锋测量、内存卡缺陷检测、耳机模组芯片气泡检测、瓶盖缺口检测等。
105.所述飞拍工位94的工作台为飞拍工作台941,所述飞拍工位的视觉装置为飞拍相机942,所述飞拍工位94包括第四支架943、第四x轴导轨944、第四y轴导轨945。其中:
106.第四支架943设于所述支撑台上;
107.第四x轴导轨944设于所述第四支架上;所述飞拍相机设于所述第四x轴导轨上且可相对所述第四x轴导轨沿x轴方向运动;
108.第四y轴导轨945设于所述支撑台上,所述飞拍工作台设于所述第四y轴导轨上且可相对所述第四y轴导轨沿y轴方向运动。
109.机器视觉引导点胶工位完成后,传送装置的传送机械手将演示工件抓取起来,并沿传送导轨将演示工件送至飞拍工位94的飞拍工作台941上。飞拍相机对沿第四y轴导轨945高速运动的飞拍工作台上的演示工件进行高速拍摄。飞拍工位配备的高精度相机可对高速运动中的产品的某些特征进行图像数据的采集和处理,可用于对高速运动的产品特征提取进行演示。
110.所述机器人贴合转移工位95的工作台为飞拍工作台941,所述机器人贴合转移工位95的传送装置包括第一贴合机械手951,在本具体实施例中,所述第一贴合机械手为四轴机器人。所述第一贴合机械手上设置有第一贴合吸盘9511,所述机器人贴合转移工位95的视觉装置包括第一贴合相机952和第二贴合相机953。其中:
111.第一贴合相机952设于所述支撑台上;
112.第二贴合相机953设于所述第一贴合机械手上且随所述第一贴合机械手一起运动;所述第一贴合机械手抓取待贴合工件至所述第一贴合相机上方,所述第一贴合相机拍摄待贴合工件获取第一贴合数据,再移动至所述飞拍工作台上方,所述第二贴合相机拍摄待贴合位置处获取第二贴合数据,所述控制装置根据所述第一贴合数据和第二贴合数据引导所述第一贴合机械手将所述待贴合工件贴合于待贴合位置。
113.机器人贴合转移工位95采用上下布局的两套视觉系统配合四轴机器人,可分别对电路卡以及电路卡在手机壳体上的贴合区域进行图像数据采集处理,引导四轴机器人进行小件贴合。飞拍工位和机器人贴合转移工位可组成一个机器人飞拍贴合工位,还可通过更换冶具和相机,作为一个单独贴合设备。机器人飞拍贴合工位支持的实训课题包括:定位抓取棋子、手机零件贴合、机器人作业空间测定实验、机器人搬运作业实验、耳机模组芯片气泡检测、抓取瓶盖并分类放置等。
114.所述多功能贴合工位96的工作台为多功能工作台961,所述多功能贴合工位的视觉装置包括第三贴合相机962和第四贴合相机963,其中第三贴合相机固定在机架上;
115.所述多功能贴合工位96包括第五支架964、第五x轴导轨965、第五z轴导轨966、第二贴合机械手967、第五y轴导轨968。其中:
116.第五支架964设于所述支撑台上;
117.第五x轴导轨965设于所述第五支架上;
118.第五z轴导轨966设于所述第五x轴导轨上且可相对所述第五x轴导轨沿x轴方向运动;
119.第二贴合机械手967设于所述第五z轴导轨上且可相对所述第五z轴导轨沿z轴方向运动;所述第四贴合相机固定在第二贴合机械手上;
120.第五y轴导轨968设于所述支撑台上,所述多功能工作台设于所述第五y轴导轨上
且可相对所述第五y轴导轨沿y轴方向运动;所述多功能工作台961包括分离四轴平台9611和uvw平台9612。
121.多功能工作台961先沿第五y轴导轨968运动至机器人贴合转移工位95处,机器人贴合转移工位的第一贴合机械手将演示工件抓取放至多功能工作台961,多功能工作台再运动回多功能贴合工位,第二贴合机械手967抓取电路卡运动至第三贴合相机上方拍照,获取电路卡的图像信息和位置信息,然后第四贴合相机运动至手机壳体的上方,对手机壳体进行拍照,获取手机壳体上待贴合位置的图像信息和位置信息,然后控制器根据采集的图像信息和位置信息驱动第二贴合机械手将电路卡贴合至手机壳体的待贴合位置。
122.多功能贴合工位配备了分离4轴平台和uvw平台的双平台系统,上下布局的两套视觉系统分别对电路卡和手机壳体上的贴合位置进行图像数据采集和分析处理,引导平台进行精密贴合。多功能贴合工位也可作为两套单独贴合设备使用。多功能贴合工位支持的实训课题包括:电池极片漏铜检测、圆珠笔位姿检测、传输物件扫码、在线检测糖果方向、多变包装上的字符识别、瓶盖安全密封检测。
123.所述多相机贴合工位97的视觉装置包括多个相机(图中未示出),所述多相机贴合工位的工作台为可沿xy平面旋转的旋转工作台972,所述多相机贴合工位97包括第六支架973、第六x轴导轨974、第六z轴导轨975、第三贴合机械手(图中未示出)、第六y轴导轨977。其中:
124.第六支架973设于所述支撑台上;
125.第六x轴导轨974设于所述第六支架上;
126.第六z轴导轨975设于所述第六x轴导轨上且可相对所述第六x轴导轨沿x轴方向运动;
127.第三贴合机械手设于所述第六z轴导轨上且可相对所述第六z轴导轨沿z轴方向运动;所述多相机贴合工位的视觉装置固定在第三贴合机械手上;
128.第六y轴导轨977设于所述支撑台上,所述旋转工作台设于所述第六y轴导轨上且可相对所述第六y轴导轨沿y轴方向运动;
129.所述控制装置控制所述第三贴合机械手抓取待贴合工件,所述多个相机分别拍摄待贴合位置的四周以获取贴合位置参数,并根据所述贴合位置参数实时调整所述旋转工作台旋转和移动至所述第三贴合机械手的待贴合工件下方后贴合所述待贴合工件于所述待贴合位置。
130.多功能贴合工位完成后,传送装置的传送机械手将演示工件抓取起来,并沿传送导轨将演示工件送至多相机贴合工位的旋转工作台972上。在本具体实施例中,多相机贴合工位97具有四个相机,其呈方形排列,第三机械手抓取手机屏幕后,在旋转工作台972沿y轴方向运动和沿xy平面旋转时,四个相机拍摄手机壳体的四周以获取手机壳体贴合位置参数,并根据所述贴合位置参数调整所述旋转工作台旋转和移动至所述第三贴合机械手的手机屏幕下方后贴合所述手机屏幕于手机壳体上。
131.多相机贴合工位97配备了四套高精度的视觉定位系统和四条精密运动轴,可实现对手机屏幕和手机壳体贴合实时对位调整。本工位也可通过更换冶具和视觉配件,实现不同产品的贴合,还可当做一台单独的屏幕贴合设备使用。
132.多相机贴合工位支持的实训课题包括:手机后盖logo检测、饼干完整性检测、胶囊
有无检测、玻璃划痕检测、多变包装上的字符识别、芯片字符瑕疵检测、银行卡瑕疵检测、手机屏尺寸检测、输液管部件有无检测等。
133.所述自动光学检测工位98的工作台为检测工作台981,所述自动光学检测工位的视觉装置为检测相机982,所述自动光学检测工位98包括第七支架983、第七x轴导轨984、第七z轴导轨985、第七y轴导轨986。其中:
134.第七支架983设于所述支撑台上;
135.第七x轴导轨984设于所述第七支架上;
136.第七z轴导轨985设于所述第七x轴导轨上且可相对所述第七x轴导轨沿x轴方向运动;所述检测相机设于所述第七z轴导轨上且可相对所述第七z轴导轨沿z轴方向运动;
137.第七y轴导轨986设于所述支撑台上,所述检测工作台设于所述第七y轴导轨上且可相对所述第七y轴导轨沿y轴方向运动。
138.多相机贴合工位完成后,传送装置的传送机械手将演示工件抓取起来,并沿传送导轨将演示工件送至自动光学检测工位98的检测工作台981上。检测相机对演示工件进行拍照检测。
139.多相机贴合工位配备了高精度的视觉系统和精密运动轴,可以对贴合后的产品进行外观或尺寸的测量,及时发现不良品并记录反馈。通过更换冶具和视觉配件,也可实现对不同产品的测量。多相机贴合工位还可作为一台单独的测量设备使用。
140.自动光学检测工位支持的实训课题包括:手机外观检测、果冻标签日期检测、药盒字符检测、薄膜轮廓检测、电阻瑕疵检测、瓶盖点印字符识别等。
141.本发明还可增加测试评分功能,以方便教学过程中根据实际情况进行评估教学效果。
142.本发明通过设置多个机器视觉演示工位,在各机器视觉演示工位上设置视觉装置,并利用传送装置将各机器视觉演示工位连贯在一起。从而使得在教学时,不再需要到工厂的生产现场进行实习观摩,而且可以结合不同的知识点设置不同的机器视觉演示工位,提高了教学效果和教学效率,学生能沿着整线各个工位合格规范地操作一遍,基本上就能达到现场工程师的水准。
143.此外,本发明通过在机架上设置多个机器视觉演示工位,所述机架包括多个相同的支撑台,各所述机器视觉演示工位分别一一对应设于所述支撑台上;所述机器视觉演示工位包括设于所述支撑台上的工作台和设于所述支撑台上的视觉装置,由于将支撑台进行了统一,实现了模块化,从而可在教学过程中,需要更换机器视觉演示工位时,可快速进行更换,从而使各工位之间可便捷的实现互换,互换性较好。而且由于可以互换,某一工位的功能可以随时根据实际需要进行替换,或者加入新的演示工位,演示新的新案例。
144.本发明具有以下特点:1.提供便利的教学设备,不用去工厂实操;2.展现机器视觉相关技术目前的实际应用中的几个最经典的案例,为教学提供一定的方向;3.最大程度还原实际生产现场的应用场景,让学生操作完教学设备就可以直接上手实际生产设备,实现无缝对接。
145.本发明可用于各大高校科研院所用于机器视觉教学,帮助学生直观、快捷掌握机器视觉知识体系。
146.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精
神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。