技术特征:
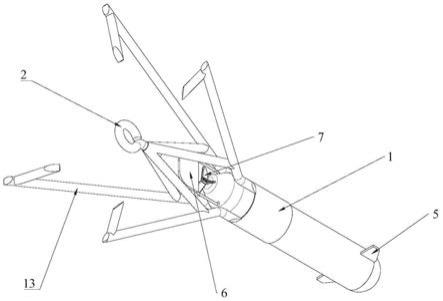
1.一种声学打捞装置,与水上单元通信连接,用于打捞水下声学释放器,其特征在于,包括打捞主体、连接于所述打捞主体尾部的吊钩以及连接于所述吊钩的柔性延伸部,所述打捞主体的外部设置有方向控制机构,所述打捞主体的内部设置有控制系统、声学感应机构、动力机构以及电源,所述控制系统、声学感应机构、动力机构均与所述电源相连;所述声学感应机构,与所述控制系统连接,用于接收所述水下声学释放器发出的声学信号,根据所述声学信号持续测定所述打捞主体与所述水下声学释放器之间的距离,并生成控制信号发送至所述控制系统,以及生成打捞信号发送至所述水上单元;所述控制系统,与所述动力机构连接,用于接收所述控制信号,根据所述控制信号控制所述动力机构,以使所述动力机构驱动所述方向控制机构控制所述打捞主体接近所述水下声学释放器。2.根据权利要求1所述的一种声学打捞装置,其特征在于,所述声学感应机构包括第一声学感应装置以及第二声学感应装置,所述第一声学感应装置以及第二声学感应装置均与所述控制系统连接;所述第一声学感应装置,设置在所述打捞主体头部,用于接收所述水下声学释放器发出的声学信号,根据所述声学信号持续测定所述打捞主体与所述水下声学释放器之间的距离,生成控制信号发送至所述控制系统;所述第二声学感应装置,设置在所述打捞主体侧面,用于接收所述水下声学释放器发出的声学信号,根据所述声学信号持续测定所述打捞主体与所述水下声学释放器之间的距离,生成打捞信号发送至所述水上单元。3.根据权利要求2所述的一种声学打捞装置,其特征在于,所述第一声学感应装置的信号收发方向为所述打捞主体前进方向,所述第二声学感应装置的信号收发方向为垂直于所述打捞主体前进方向。4.根据权利要求1所述的一种声学打捞装置,其特征在于,所述方向控制机构包括升降控制舵、左右控制舵以及螺旋桨,所述升降控制舵、左右控制舵以及螺旋桨均设置于所述打捞主体的外部,并且均与所述动力机构连接。5.根据权利要求4所述的一种声学打捞装置,其特征在于,所述动力机构包括升降控制电机、左右控制电机以及推进电机;所述升降控制电机与所述升降控制舵连接,所述左右控制电机与所述左右控制舵连接,所述推进电机与所述螺旋桨连接;所述升降控制电机、左右控制电机以及推进电机还均与所述控制系统连接,用于根据所述控制系统接收到的控制信号,分别驱动所述升降控制舵、左右控制舵以及螺旋桨,控制所述打捞主体接近所述水下声学释放器。6.根据权利要求5所述的一种声学打捞装置,其特征在于,所述控制系统包括主控系统以及姿态控制仪;所述主控系统,分别与所述声学感应机构以及推进电机连接,用于接收所述控制信号,根据所述控制信号控制所述推进电机,以使所述推进电机驱动所述螺旋桨,控制所述打捞主体接近所述水下声学释放器;所述姿态控制仪与所述升降控制电机以及左右控制电机连接;所述主控系统,还与所述姿态控制仪连接,用于接收所述控制信号,根据所述控制信号
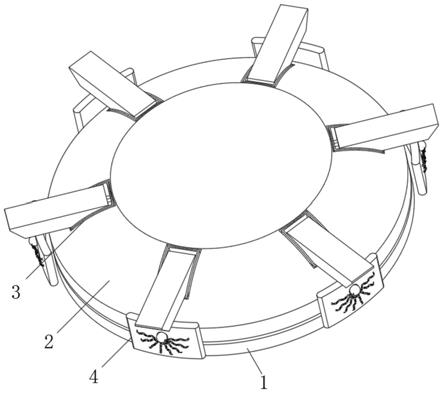
控制所述姿态控制仪,以使所述姿态控制仪控制所述升降控制电机以及左右控制电机,所述升降控制电机以及左右控制电机驱动所述升降控制舵以及所述左右控制舵,控制所述打捞主体接近所述水下声学释放器。7.根据权利要求5所述的一种声学打捞装置,其特征在于,还包括多个抓钩,所述多个抓钩在所述打捞主体尾部周向分布。8.根据权利要求7所述的一种声学打捞装置,其特征在于,所述螺旋桨设置于所述打捞主体尾部,所述吊钩通过所述抓钩连接于所述打捞主体尾部。9.根据权利要求1
‑
8任一项所述的一种声学打捞装置,其特征在于,所述打捞主体内部还设置有重力平衡块,所述重力平衡块安装于所述控制系统、声学感应机构、动力机构的下方。10.一种声学打捞方法,应用于如权利要求1
‑
9任一项所述的声学打捞装置,其特征在于,包括以下步骤:设置所述声学感应机构的信号收发频率与所述水下声学释放器相配对;所述声学感应机构在所述信号收发频率下接收所述水下声学释放器发送的声学信号,根据所述声学信号持续测定所述打捞主体与所述水下声学释放器之间的距离,生成控制信号并发送至所述控制系统;所述控制系统根据所述控制信号控制所述动力机构,以使所述动力机构驱动所述方向控制机构控制所述打捞主体接近所述水下声学释放器;当所述声学感应机构测定的所述距离为8~12m时,所述控制系统控制所述动力机构,以使所述动力机构驱动所述方向控制机构控制所述打捞主体围绕所述水下声学释放器盘旋15
‑
25圈;当所述声学感应机构测定的所述距离为0时,所述控制系统控制所述动力机构停止运行,以使所述动力机构驱动所述方向控制机构控制所述打捞主体停止盘旋;所述声学感应机构生成打捞信号并发送至所述水上单元;所述水上单元收紧所述柔性延伸部,实现对所述水下声学释放器的打捞。
技术总结
本发明公开了一种声学打捞装置及方法,装置包括打捞主体、连接于打捞主体尾部的吊钩以及连接于吊钩的柔性延伸部,打捞主体的外部设置有方向控制机构,打捞主体的内部设置有控制系统、声学感应机构、动力机构及电源;所述声学感应机构,与控制系统连接,用于接收水下声学释放器发出的声学信号,根据声学信号持续测定打捞主体与水下声学释放器之间的距离,并生成控制信号发送至控制系统,以及生成打捞信号至所述水上单元;所述控制系统,与动力机构连接,用于接收控制信号,根据控制信号控制动力机构,以使动力机构驱动方向控制机构控制打捞主体接近水下声学释放器。本发明实现打捞装置对水下锚系的精准定位与自动跟踪,大大提升打捞效率及成功率。效率及成功率。效率及成功率。
技术研发人员:周蓓锋 丁涛 金魏芳 蔺飞龙 梁楚进 刘丁 晏力争
受保护的技术使用者:自然资源部第二海洋研究所
技术研发日:2021.08.02
技术公布日:2021/11/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。