1.本发明涉及智能船技术领域,具体而言,尤其涉及一种潜浮式无人船及其运行方法。
背景技术:
2.半潜航行器以其优良的雷达隐身性能、长时间续航能力、对不同海况的高度适应能力等优势得到广泛青睐。近年来,研究者对多种形式的半潜航行器的水动力、操控、自航等性能进行研究,其在科考、军用等领域存在巨大应用潜力。作为一种特殊的半潜航行器,潜浮式水面无人船潜兼有半潜隐蔽和水面高速航行的能力,为水中多航态航行器的设计提供了崭新思路。
技术实现要素:
3.根据上述提出的技术问题,提供一种潜浮式无人船及其运行方法。本发明潜浮式无人船在各航态均具有稳定航行性能,可根据最优航行工况,选择垂向推进器启动工作或停止工作,控制无人船潜浮状态。水面航行时可作为通信中继,水下航行时可减少兴波阻力、开展深海探测作业等;较潜艇而言,该新型无人船两舷采取直壁式能减小湿面积进而减小摩擦力。
4.本发明采用的技术手段如下:
5.一种潜浮式无人船,包括:主船体以及分别连接在主船体上的推进器、侧翼以及舵;
6.所述主船体包括船首、平行中体、船尾;
7.所述推进器包括首部侧推器、第一垂向推进器、第二垂向推进器以及尾部推进器;
8.所述侧翼包括第一侧翼和第二侧翼;
9.所述舵用于调节无人船水面/水下航行的航向。
10.进一步地,所述主船体的左右舷侧对称设置,且采用流线型形状。
11.进一步地,所述首部侧推器设置在所述主船体的船首,用于保证无人船的操纵性。
12.进一步地,所述第一垂向推进器和第二垂向推进器分别对称设置在所述主船体的平行中体,所述第一垂向推进器设置在靠近船首的位置,用于调节无人船的下潜状态;所述第二垂向推进器设置在靠近船尾的位置,用于调节无人船的上浮状态。
13.进一步地,所述尾部推进器设置在所述主船体的船尾,用于保证无人船的快速性。
14.进一步地,所述首部侧推器、第一垂向推进器、第二垂向推进器以及尾部推进器中的螺旋桨均安装在位于设计水线以下的位置。
15.进一步地,所述第一侧翼和第二侧翼通过旋栓与所述主船体的平行中体相连,用于调节无人船入水/出水角度,控制无人船航行轨迹。
16.本发明还提供了一种潜浮式无人船的运行方法,所述方法基于上述潜浮式无人船来实现,包括如下步骤:
17.s1、无人船下潜时,第一垂向推进器与第二垂向推进器旋转工作,使得无人船下潜入水;同时转动第一侧翼与第二侧翼,调节无人船入水角度;尾部推进器旋转提供无人船航行动力;
18.s2、无人船水下航行时,第一垂向推进器与第二垂向推进器旋转工作,保持无人船处于定潜深匀速航行状态;第一侧翼与第二侧翼停止工作,潜水深度不再调整;尾部推进器仍旋转提供无人船航行动力,通过调节舵以及首部侧推器来控制无人船的操纵性;
19.s3、无人船上浮时,尾部推进器旋转提供无人船航行动力,第一垂向推进器与第二垂向推进器停止工作,转动第一侧翼与第二侧翼,调节无人船出水角度,无人船浮于水面;
20.s4、无人船水面航行时,尾部推进器仍旋转提供无人船航行动力;第一垂向推进器与第二垂向推进器停止工作,使得无人船所受浮力大于重力,浮于水面;第一侧翼与第二侧翼停止工作,保持无人船水面航行;通过调节舵以及首部侧推器来控制无人船的操纵性。
21.较现有技术相比,本发明具有以下优点:
22.1、本发明提供的潜浮式无人船,具有水面/水下双介质领域航行功能,其中,水面航行具有优良的快速性与耐波性,并可通过侧翼与垂向推进器实现跨域下潜/上浮与水下定潜深匀速航行。该船舶适用于编队通信中继、跨域探测、隐蔽航行等水面水下多航态任务。
23.2、、本发明提供的潜浮式无人船,在各航态均具有稳定航行性能,可根据最优航行工况,选择垂向推进器启动工作或停止工作,控制无人船潜浮状态。水面航行时可作为通信中继,水下航行时可减少兴波阻力、开展深海探测作业等;较潜艇而言,本发明无人船两舷采取直壁式能减小湿面积进而减小摩擦力。
24.基于上述理由本发明可在智能船等领域广泛推广。
附图说明
25.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图做以简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
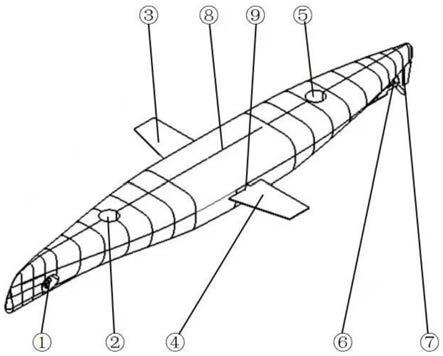
26.图1为本发明潜浮式无人船的结构示意图。
27.图2为本发明潜浮式无人船的侧视图。
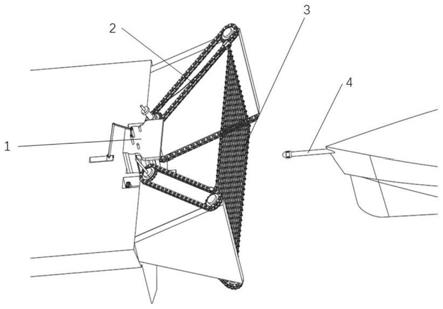
28.图3为本发明潜浮式无人船的舵结构示意图。
29.图4为本发明潜浮式无人船的推进器结构示意图。
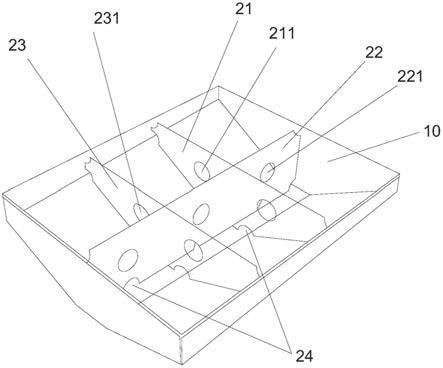
30.图5为本发明潜浮式无人船的侧翼结构示意图。
31.图中:1、首部侧推器;2、第一垂向推进器;3、第一侧翼;4、第二侧翼;5、第二垂向推进器;6、尾部推进器;7、舵;8、平行中体;9、旋栓。
具体实施方式
32.为了使本技术领域的人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人
员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
33.需要说明的是,本发明的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本发明的实施例能够以除了在这里图示或描述的那些以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
34.如图1
‑
2所示,本发明提供了一种潜浮式无人船,包括:主船体以及分别连接在主船体上的推进器、侧翼以及舵;
35.所述主船体包括船首、平行中体8、船尾;
36.所述推进器包括首部侧推器1、第一垂向推进器2、第二垂向推进器5以及尾部推进器6;
37.所述侧翼包括第一侧翼3和第二侧翼4;
38.所述舵7用于调节无人船水面/水下航行的航向,其结构示意图如图3所示。
39.具体实施时,作为本发明优选的实施方式,继续参见图1
‑
2,所述主船体的左右舷侧对称设置,且采用流线型形状。该形状能够减小无人船航行时的剩余阻力,两舷直壁式较潜艇湿表面积小,摩擦阻力小,阻力性能优良。
40.具体实施时,作为本发明优选的实施方式,如图4所示,为本发明潜浮式无人船中推进器的结构示意图,本发明中,推进器包括首部侧推器1、第一垂向推进器2、第二垂向推进器5以及尾部推进器6;所述首部侧推器1设置在所述主船体的船首,用于保证无人船的操纵性。所述第一垂向推进器2和第二垂向推进器5分别对称设置在所述主船体的平行中体8,所述第一垂向推进器2设置在靠近船首的位置,用于调节无人船的下潜状态;所述第二垂向推进器5设置在靠近船尾的位置,用于调节无人船的上浮状态。所述尾部推进器6设置在所述主船体的船尾,用于保证无人船的快速性。
41.具体实施时,作为本发明优选的实施方式,所述首部侧推器1、第一垂向推进器2、第二垂向推进器5以及尾部推进器6中的螺旋桨均安装在位于设计水线以下的位置。该种安装方式能够避免螺旋桨出水,使螺旋桨浸没水中,保证推进效率,位于中纵剖面。
42.具体实施时,作为本发明优选的实施方式,如图5所示,为本发明潜浮式无人船中侧翼的结构示意图,所述第一侧翼3和第二侧翼4通过旋栓9与所述主船体的平行中体8相连,用于调节无人船入水/出水角度,控制无人船航行轨迹。
43.本发明实施例还提供的一种潜浮式无人船的运行方法,所述方法基于上述潜浮式无人船来实现,包括如下步骤:
44.s1、无人船下潜时,第一垂向推进器2与第二垂向推进器5旋转工作,使得无人船下潜入水;同时转动第一侧翼3与第二侧翼4,调节无人船入水角度;尾部推进器6旋转提供无人船航行动力;
45.s2、无人船水下航行时,第一垂向推进器2与第二垂向推进器5旋转工作,保持无人船处于定潜深匀速航行状态;第一侧翼3与第二侧翼4停止工作,潜水深度不再调整;尾部推
进器6仍旋转提供无人船航行动力,通过调节舵7以及首部侧推器1来控制无人船的操纵性;
46.s3、无人船上浮时,尾部推进器6旋转提供无人船航行动力,第一垂向推进器2与第二垂向推进器5停止工作,转动第一侧翼3与第二侧翼4,调节无人船出水角度,无人船浮于水面;
47.s4、无人船水面航行时,尾部推进器6仍旋转提供无人船航行动力;第一垂向推进器2与第二垂向推进器5停止工作,使得无人船所受浮力大于重力,浮于水面;第一侧翼3与第二侧翼4停止工作,保持无人船水面航行;通过调节舵7以及首部侧推器1来控制无人船的操纵性。
48.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。