技术特征:
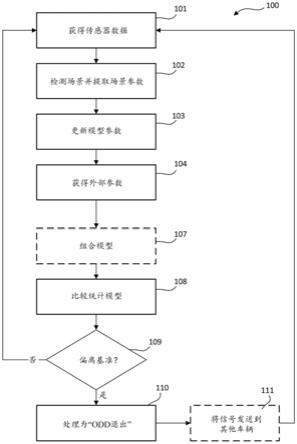
1.一种用于管理地面车辆的自动驾驶系统ads的方法(100),其中所述ads包括场景标识符模块,所述场景标识符模块被配置为在所述ads的运行设计域odd内监控所述地面车辆的周围环境中的场景,其中所述odd与基准统计模型相关联,所述基准统计模型指示与借助于所述场景标识符模块可检测的多个场景有关的统计分布,所述方法包括:获得(101)包括关于所述地面车辆的周围环境的信息的传感器数据;借助于所述场景标识符模块,基于所获得的传感器数据来检测(102)所述周围环境中的场景,并提取指示检测到的场景的场景参数集;基于所提取的所述场景参数集来本地更新(103)所述基准统计模型的模型参数集,以便获得本地更新的统计模型,本地更新后的模型参数集指示与检测到的场景相关联的统计分布;从外部地面车辆获得(104)所述基准统计模型的外部更新的模型参数集,所述外部更新的模型参数指示与外部检测到的场景相关联的统计分布;将所述基准统计模型与所述本地更新的统计模型和所述外部更新的模型参数集比较(108);基于所述比较来确定(109)是否存在高于阈值的偏差;以及一经确定高于所述阈值的所述偏差,则确定(110)用于所述odd的所述基准统计模型至少暂时无效,并且响应于所述基准统计模型无效的所述确定来控制所述ads。2.根据权利要求1所述的方法(100),其中获得外部更新的模型参数集的步骤包括:获得包括所述外部更新的模型参数集的外部更新的统计模型;其中所述方法进一步包括:组合(107)所述本地更新的统计模型与所述外部更新的统计模型,以便形成组合统计模型;以及其中比较的步骤包括:所述基准统计模型与组合统计模型。3.根据权利要求1或2所述的方法(100),其中所获得的所述外部更新的模型参数集包括用于产生所述外部更新的模型参数集的样本数。4.根据权利要求1或2所述的方法(100),进一步包括:将指示所述本地更新后的模型参数集的信号发送(111)到至少一个外部车辆。5.根据权利要求1或2所述的方法(100),进一步包括:将指示高于所述阈值的所确定的偏差的信号发送(111)到至少一个外部车辆;或将指示用于所述odd的所述基准统计模型至少暂时无效的所述确定的信号发送(111)到至少一个外部车辆。6.根据权利要求1或2所述的方法(100),其中响应于所述基准统计模型无效的所述确定来控制所述ads包括下列操作中的至少一个:在所述地面车辆的人机界面hmi处产生指示移交请求的信号;执行最小风险条件mrc策略;以及至少暂时抑制包括在所述odd中的地理区域内的所述ads的进一步激活。7.一种存储有一个或多个程序的计算机可读存储介质,所述一个或多个程序被配置为由车辆控制系统的一个或多个处理器执行,所述一个或多个程序包括用于执行根据前述权利要求中的任意一项所述的方法的指令。
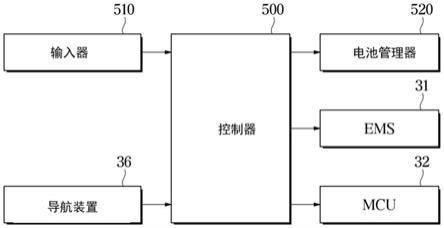
8.一种用于管理地面车辆(1)的自动驾驶系统ads的系统(10),其中所述ads包括场景标识符模块,所述场景标识符模块被配置为在所述ads的运行设计域odd内监控所述地面车辆的周围环境中的场景,其中所述odd与基准统计模型(21)相关联,所述基准统计模型(21)指示与借助于所述场景标识符模块可检测的多个场景有关的统计分布,所述系统包括:存储器(12),包括所述基准统计模型;控制电路(11),被配置为:获得包括关于所述地面车辆(1)的周围环境的信息的传感器数据;借助于所述场景标识符模块,基于所获得的传感器数据来检测所述周围环境中的场景并提取指示检测到的场景的场景参数集;基于所提取的所述场景参数集来本地更新所述基准统计模型的模型参数集,以便获得本地更新的统计模型(22),本地更新后的模型参数集指示与检测到的场景相关联的统计分布;从外部地面车辆(2)获得所述基准统计模型的外部更新的模型参数集,所述外部更新的模型参数指示与外部检测到的场景相关联的统计分布;将所述基准统计模型(21)与所述本地更新的统计模型(22)和所述外部更新的模型参数集比较;基于所述比较来确定是否存在高于阈值的偏差;以及一经检测到高于所述阈值的所述偏差,则确定用于所述odd的所述基准统计模型(21)至少暂时无效并产生信号,以便响应于所述基准统计模型无效的所述确定来控制所述ads。9.根据权利要求8所述的系统(10),其中所述控制电路(11)被配置为获得包括所述外部更新的模型参数集的外部更新的统计模型(23),并且其中所述控制电路进一步被配置为:组合所述本地更新的统计模型(22)与所述外部更新的统计模型(23),以便形成组合统计模型;以及比较所述基准统计模型(21)与组合统计模型。10.根据权利要求8或9所述的系统(10),其中所获得的所述外部更新的模型参数集包括用于产生所述外部更新的模型参数集的样本数。11.根据权利要求8或9所述的系统(10),其中所述控制电路(11)进一步被配置为:指示所述本地更新后的模型参数集的信号到至少一个外部车辆。12.根据权利要求8或9所述的系统(10),其中所述控制电路(11)被配置为响应于所述基准统计模型(21)无效的所述确定,通过执行下列操作中的至少一个来控制所述ads:在所述地面车辆的人机界面hmi处产生指示移交请求的信号;执行最小风险条件mrc策略;以及至少暂时抑制包括在所述odd中的地理区域内的所述ads的进一步激活。13.一种地面车辆(1),包括:自动驾驶系统ads,包括被配置为监控所述地面车辆的周围环境中的场景的场景标识符模块;感知系统(6),包括被配置为监控所述地面车辆(1)的周围环境的至少一个传感器(6a、6b、6c);
定位系统(5),被配置为监控所述地面车辆的地理地图位置;根据权利要求8至12中的任意一项所述的用于管理所述ads的系统(10)。
技术总结
本公开涉及用于管理车辆的自动驾驶系统的方法和系统。而且,本公开提出了作为用于确定运行设计域(ODD)的条件和/或要求是否被满足的统计建模的使用,由此ADS有效性可被确定。更详细地,本公开涉及利用附近车辆的ADS以相互共享它们的本地更新的统计模型。如果来自两个ADS的统计模型共同显示基准统计模型在这个时间点不是有效的,则可采取来自每个ADS的适当动作。当动作。当动作。
技术研发人员:芒努斯
受保护的技术使用者:哲内提
技术研发日:2021.04.16
技术公布日:2021/11/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。