驾驶辅助系统和驾驶辅助方法
1.相关申请的交叉引用
2.本技术基于并要求于2020年4月16日提交的申请号为10
‑
2020
‑
0045936的韩国专利申请的优先权,该韩国专利申请的公开内容通过引用并入本文。
技术领域
3.本公开涉及一种能够提高燃料效率的驾驶辅助系统和驾驶辅助方法。
背景技术:
4.车辆可以是指使用化石燃料和/或电力作为动力源在公路或铁路上行驶的移动工具或运输工具。
5.使用化石燃料的车辆可能会由于化石燃料的燃烧而排放细粉尘、水蒸气、二氧化碳、一氧化碳、碳氢化合物、氮、氮氧化物和/或硫氧化物。水蒸气和二氧化碳已知会导致全球变暖,并且细粉尘、一氧化碳、碳氢化合物、氮氧化物和/或硫氧化物是已知的可能对人体有害的空气污染物。
6.因此,近来已经开发了使用环保能源代替化石燃料的车辆。例如,正在开发使用化石燃料和电力两者的混合动力电动车辆(hev)以及仅使用电力的电动车辆(ev)。
7.在混合动力车辆的电池中,荷电状态(soc,state of charge)根据行驶状态由发动机的操作被可变地控制,但是发动机的操作是灵活的,使得行驶状态不能被立即反映在电池的soc控制中。因此,混合动力车辆在控制电池的soc方面存在许多困难。
技术实现要素:
8.本公开的一方面提供了一种用于提高插电式混合动力电动车辆的燃料效率的驾驶辅助系统和驾驶辅助方法。
9.本公开的其它方面将在下面的描述中部分地阐述,并且部分地通过描述而显而易见,或者可以通过本公开的实践而获知。
10.根据本公开的一方面,提供了一种主车辆的驾驶辅助设备,包括:输入器,被配置为接收用于激活燃料效率模式的输入;以及控制器,被配置为:响应于接收用于激活燃料效率模式的输入,基于从主车辆的导航装置接收的路线信息以及电池的状态来确定功率分配的控制因素,并且基于控制因素来执行功率分配。
11.控制器可以被配置为基于主车辆与前方车辆之间的预设距离以及控制因素来执行功率分配。
12.响应于在智能巡航控制(scc)模式被激活的同时接收用于激活燃料效率模式的输入,控制器可以被配置为基于在scc模式下设置的主车辆与前方车辆之间的距离以及控制因素来执行功率分配。
13.控制器可以被配置为通过反映从导航装置接收的交通状况来更新主车辆与前方车辆之间的距离以及控制因素。
14.响应于接收用于激活燃料效率模式的输入,控制器可以被配置为基于从导航装置接收的路线信息、电池的当前荷电状态(soc)和电池的目标soc来确定功率分配的控制因素。
15.一种车辆可以包括该设备。
16.根据本公开的另一方面,提供了一种主车辆的驾驶辅助方法,包括:由输入器接收用于激活燃料效率模式的输入;响应于接收输入,由控制器基于从主车辆的导航装置接收的路线信息以及电池的状态来确定功率分配的控制因素;并且由控制器基于控制因素来执行功率分配。
17.基于控制因素来执行功率分配可以包括:基于主车辆与前方车辆之间的预设距离以及控制因素来执行功率分配。
18.基于控制因素来执行功率分配可以包括:响应于在智能巡航控制(scc)模式被激活的同时接收用于激活燃料效率模式的输入,基于在scc模式下设置的主车辆与前方车辆之间的距离以及控制因素来执行功率分配。
19.该方法可以进一步包括:由控制器通过反映从导航装置接收的交通状况来更新主车辆与前方车辆之间的距离以及控制因素。
20.确定控制因素可以包括:响应于接收用于激活燃料效率模式的输入,基于从导航装置接收的路线信息、电池的当前荷电状态(soc)和电池的目标soc来确定功率分配的控制因素。
21.根据本公开的另一方面,提供了一种非暂时性计算机可读介质,该非暂时性计算机可读介质存储计算机可运行指令,该计算机可运行指令在由处理器运行时,使主车辆的驾驶辅助设备执行:由输入器接收用于激活燃料效率模式的输入;响应于接收输入,由控制器基于从主车辆的导航装置接收的路线信息以及电池的状态来确定功率分配的控制因素;并且由控制器基于控制因素来执行功率分配。
附图说明
22.通过以下结合附图对实施例的描述,本公开的这些和/或其它方面将变得显而易见且更容易理解,在附图中:
23.图1是示出根据实施例的车辆的配置的视图。
24.图2是示出根据实施例的车辆的电气组件的视图。
25.图3是示出根据实施例的驾驶辅助系统的配置的视图。
26.图4是示出根据实施例的驾驶辅助方法的视图。
具体实施方式
27.在整个说明书中,相同的附图标记指代相同的元件。并非将描述本公开的实施例的所有元件,并且将省略对本领域公知的或在示例性实施例中彼此重复的内容的描述。如在整个说明书中所使用的术语,诸如“~部件”、“~模块”、“~构件”、“~块”等,可以以软件和/或硬件来实施,并且多个“~部件”、“~模块”、“~构件”或“~块”可以以单个元件来实施,或者单个“~部件”、“~模块”、“~构件”或“~块”可以包括多个元件。
28.将进一步理解的是,术语“连接”及其派生词既指直接连接又指间接连接,并且间
接连接包括通过无线通信网络的连接。
29.除非另外说明,否则术语“包括(包括有)”和“包含(包含有)”是包含性的或开放式的,并且不排除另外的、未叙述的元件或方法步骤。将进一步理解的是,术语“构件”及其派生词既指一个构件与另一构件接触的情况,又指两个构件之间存在另一构件的情况。
30.在整个说明书中,当一个构件位于另一构件“上”时,这不仅包括一个构件与另一构件接触的情况,而且还包括两个构件之间存在另一构件的情况。
31.将进一步理解的是,尽管本文可以使用术语“第一”、“第二”、“第三”等来描述各种元件、组件、区域、层和/或部分,但是这些元件、组件、区域、层和/或部分不应受这些术语的限制。这些术语仅仅用于将一个元件、组件、区域、层或部分与另一元件、组件、区域、层或部分区分开。
32.将理解的是,除非上下文另外明确指出,否则单数形式“一个”、“一种”和“该”也包括复数形式。
33.用于方法步骤的附图标记仅仅是为了便于说明而使用,而不是限制步骤的顺序。因此,除非上下文另外明确指出,否则所书写的顺序可以以其它方式实践。
34.在下文中,将参照附图描述本公开的操作原理和实施例。
35.车辆可以是使用发动机和/或马达的转向力(也被称为旋转动力)来运送人和/或物体的机械/电气装置。
36.使用发动机分解性燃烧诸如汽油、柴油、气体等的化石燃料的车辆将化石燃料燃烧期间产生的平动动力转换为旋转动力,并且可以使用转换后的转动力移动。使用发动机的车辆可以从外部接收化石燃料(例如,汽油、柴油等)。
37.使用马达的车辆被称为电动车辆(ev),并且将电池中存储的电能转换为旋转动能,并且可以使用转换后的转向力移动。使用马达的车辆可以从外部接收电力。
38.一些车辆使用发动机和马达两者。这种车辆被称为混合动力电动车辆(hev),并且可以使用发动机以及马达移动。混合动力车辆可以分类为从外部仅接收化石燃料并使用发动机和马达(发电机)产生电能的普通混合动力车辆,以及可以从外部接收化石燃料和电能两者的插电式混合动力电动车辆(phev)。
39.电动车辆和混合动力车辆通常可以分别包括用于向驱动马达供应电能的高电压电池以及用于向车辆的电气装置(电子装置)组件供应电能的低电压电池。例如,向驱动马达供应电能的高电压电池可以具有大约数百伏(v)(例如,300v至400v)的输出电压,并且向电气组件供应电能的低电压电池可以具有大约数十伏(例如,12v)的输出电压。
40.电动车辆和混合动力车辆可以在行驶的同时对高电压电池进行充电。驱动马达可以将电能转换为动能(转动力),并且可以将动能(转动力)转换为电能。换句话说,当从外部供应电能时,驱动马达可以用作马达,并且当从外部供应动能时,驱动马达可以用作发电机。当车辆下坡行驶或者通过驱动马达的操作而减速行驶(再生制动)时,驱动马达可以产生电力,并且可以使用该驱动马达所产生的电力对高电压电池进行充电(通过再生制动进行充电)。
41.另外,电动车辆和混合动力车辆(尤其是phev)可以在停车时从外部电源(例如,dc电源或ac电源)对高电压电池进行充电。例如,在充电站,可以使用商用dc电源对车辆的高电压电池进行充电。在家,可以使用家用ac电源对车辆的高电压电池进行充电。
42.另一方面,因为phev使用诸如汽油的燃料以及来自电池的电能作为动力源,所以分别计算利用剩余的燃料可以行驶的距离以及利用剩余的电池电量可以行驶的距离,并且可以通过将计算出的两个行驶距离相加来计算总行驶距离。
43.特别地,phev是一种概念,在该概念中,短距离在ev模式下行驶(cd模式:电荷消耗模式),并且在超过该距离时转换为hev模式(cs模式:电荷维持模式)。首先,phev在使用电能的cd模式下行驶,并且当电池的荷电状态(soc)达到指定的阈值时,会切换至通过一起使用发动机来维持soc的cs模式。
44.然而,现有的cd
‑
cs模式没有考虑电池效率和功率分配,因此对燃料效率没有作用。为了对此进行补偿,尽管考虑了诸如动态编程(dp)和庞特里亚金最小原理(pontryagin's minimum principle,pmp)的最佳控制,但是由于难以获得最佳控制因素,因此难以将其应用于实时控制。
45.在下文中,将详细描述用于提高phev中的燃料效率的驾驶辅助系统和驾驶辅助方法。
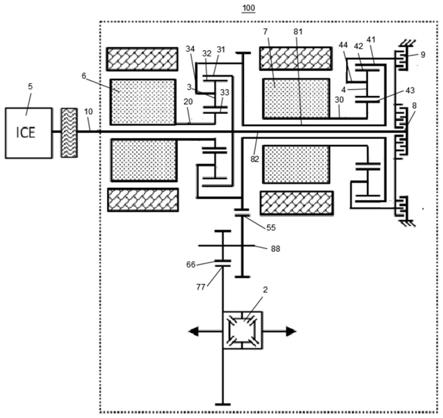
46.图1是示出根据实施例的车辆的配置的视图,并且图2是示出根据实施例的车辆的电气组件的视图。
47.图1示出混合动力车辆(特别是phev)。
48.参照图1,车辆1可以包括产生动力的动力产生装置21、传递动力的动力传递装置22、用于控制车辆1的行驶方向的转向装置23、用于使车辆1停止的制动装置24以及用于使车辆1移动的车轮25。进一步地,底盘可以进一步包括:动力产生装置21、动力传递装置22、转向装置23、制动装置24以及用于固定车轮25的车架26。
49.动力产生装置21可以产生使车辆1行驶的转动力,并且可以包括发动机21a、燃料箱ft、排气装置、马达21b、第一电池b1和充电电路c等。
50.动力传递装置22可以将动力产生装置21所产生的转动力传递到车轮25,并且可以包括变速器22a、变速杆、差速器装置和驱动轴22b。
51.转向装置23可以控制车辆1的行驶方向,并且可以包括方向盘23a、转向齿轮23b、转向连杆23c等。
52.制动装置24可以停止车轮25的转动,并且可以包括制动踏板、主缸、制动盘24a、制动片24b等。
53.车轮25可以通过动力传递装置22从动力产生装置21接收转动力并且可以使车辆1移动。车轮25可以包括设置在车辆1的前部的前轮和设置在车辆1的后部的后轮。
54.车辆1可以包括用于产生转动力的发动机21a和马达21b两者。车辆1可以包括用于向发动机21a供应化石燃料的燃料箱ft,以及用于向马达21b供应电力的作为高电压电池的第一电池b1。另外,可以设置用于从外部电源对第一电池b1进行充电的充电电路c。
55.参照图2,车辆1可以包括发动机管理系统(ems)31、马达控制单元(mcu)32、变速器控制单元(tcu)33、电子制动系统35以及电动助力转向装置34、导航装置36、音频装置37、供暖/通风/空调(hvac)装置38。
56.电气组件可以通过车辆通信网络nt彼此通信。例如,电气组件可以通过以太网、most(面向媒体的系统传输)、flexray、can(控制器局域网)、lin(本地互连网络)等来交换数据。
57.而且,电气组件可以从作为低电压电池的第二电池b2接收电力。
58.第二电池b2可以与上面图2所示的第一电池b1分开设置。
59.例如,第一电池b1可以向驱动车辆1的马达21b供应电力,并且可以输出数百伏(v)(例如,200v至800v)的电压以向马达21b供应电力。另外,第二电池b2可以向电气组件供应电力,并且可以输出数十伏(v)(例如,12v至24v)的电压以向电气组件供应电力。换句话说,第一电池b1和第二电池b2可以分开设置,以便分别向接收不同电压的电力的马达21b和电气组件供应电力。
60.另外,第一电池b1可以向马达21b供应电力,并且第一电池b1可以由马达21b进行充电。
61.例如,当车辆1在下坡时,车辆1可以通过重力和/或惯性行驶,并且车轮25的转动力可以通过动力传递装置22传递到马达21b。马达21b可以通过从车轮25传递的转动力产生电能,并且马达21b所产生的电能可以被存储在第一电池b1中。
62.作为另一示例,当驾驶员使车辆1停止或使车辆1的行驶速度减速时,马达21b可以由于使车辆1的减速而产生再生制动力,并且可以通过再生制动来产生电能。马达21b所产生的电能可以被存储在第一电池b1中。
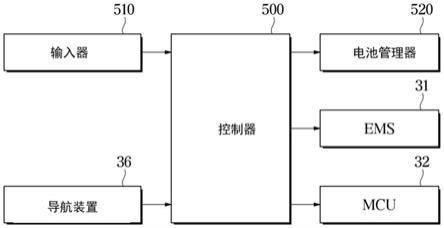
63.图3是示出根据实施例的驾驶辅助系统的配置的视图。
64.参照图3,驾驶辅助系统可以包括输入器510、导航装置36、电池管理器520、发动机管理系统(ems)31、马达控制单元(mcu)32和控制器500。
65.输入器510可以接收用于激活智能巡航控制(scc)模式的输入以及用于在scc模式被激活的状态下激活燃料效率模式的输入。输入器510可以是设置在主机单元(head unit)中的输入器或设置在中央仪表板中的输入器。
66.在scc模式被激活的情况下,当通过输入器510接收到用于激活燃料效率模式的输入时,控制器500可以从导航装置36接收行驶路线的路线信息。例如,控制器500可以通过导航装置36获取包括设定速度、平均速度、剩余距离、道路坡度和交通状况的路线信息。在scc模式被激活的情况下,当接收到用于激活燃料效率模式的输入时,由于去除了驾驶员的干预,因此具有功率分配自由的优点。
67.另外,控制器500可以与电池管理器520通信并从电池管理器520接收关于电池的soc的信息。控制器500可以基于从电池管理器520接收的电池的当前soc和目标soc来确定功率分配的控制因素。例如,控制器500可以基于电池的当前soc和目标soc,确定通过使用收费站的入口和出口处的道路坡度来最大化再生制动作为控制因素。
68.控制器500可以基于所确定的控制因素以及在scc模式下设置的车辆间距离来分配功率。控制器500可以实时地将现有scc下设置的车辆间距离更新为可以最大化电池效率和再生制动的距离,并且可以因此确定车辆1的加速度和减速度以维持车辆间距离。
69.控制器500可以通过实时地反映来自导航装置36的、关于改变的交通状况的信息来更新控制因素和车辆间距离。控制器500可以以这种方式,通过反映交通状况,基于更新后的控制因素和车辆间距离来执行功率分配。
70.图4是示出根据实施例的驾驶辅助方法的视图。
71.参照图4,当scc模式被激活并且通过输入器510接收到用于激活燃料效率模式的输入时(1000),控制器500可以从导航装置36接收行驶路线的路线信息(1010)。
72.例如,控制器500可以通过导航装置36获取包括设定速度、平均速度、剩余距离、道路坡度和交通状况的路线信息。在scc模式被激活的情况下,当接收到用于激活燃料效率模式的输入时,由于去除了驾驶员的干预,因此具有功率分配自由的优点。
73.控制器500可以基于路线信息、当前电池soc和目标电池soc来确定控制因素(1020)。
74.控制器500可以与电池管理器520通信并从电池管理器520接收关于电池的soc的信息。控制器500可以基于从电池管理器520接收的电池的当前soc和目标soc来确定功率分配的控制因素。例如,控制器500可以基于电池的当前soc和目标soc,确定通过使用收费站的入口和出口处的道路坡度来最大化再生制动作为控制因素。
75.控制器500可以基于所确定的控制因素以及在scc模式下设置的车辆间距离来执行功率分配(1030)。控制器500可以实时地将现有scc下设置的车辆间距离更新为可以最大化电池效率和再生制动的距离,并且可以因此确定车辆的加速度和减速度以维持车辆间距离。
76.当交通状况改变时(1040),控制器500可以通过反映改变后的交通状况来更新控制因素和车辆间距离(1050),并且可以基于更新后的控制因素和车辆间距离来执行功率分配(1060)。
77.控制器500可以通过实时地反映来自导航装置36的、关于改变的交通状况的信息来更新控制因素和车辆间距离。控制器500可以以这种方式,通过反映交通状况,基于更新后的控制因素和车辆间距离来执行功率分配。
78.根据本公开,可以提高插电式混合动力电动车辆的燃料效率。
79.所公开的实施例可以以存储可由处理器运行的计算机可运行指令的记录介质的形式实施。该指令可以以程序代码的形式存储,并且当由处理器运行时,该指令可以生成程序模块以执行所公开实施例的操作。该记录介质可以被实施为非暂时性计算机可读记录介质。
80.非暂时性计算机可读记录介质可以包括存储可以由计算机解释的命令的所有类型的记录介质。例如,非暂时性计算机可读记录介质可以是例如rom、ram、磁带、磁盘、闪速存储器、光学数据存储装置等。
81.至此,已经参照附图描述了本公开的实施例。对于本领域的普通技术人员显而易见的是,在不改变本公开的技术思想或基本特征的情况下,本公开可以以上述实施例之外的其它形式来实践。上面的实施例仅是示例性的,并且不应被狭义地解释。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。