1.本公开涉及一种驱动电路,且确切地说,涉及一种源极驱动器以及其校准方法。
背景技术:
2.一般来说,有机发光二极管(organic light emitting diode,oled)显示系统的基本架构为定时控制器(timing controller,tcon)将rgb数据传递到源极驱动器,且对应电压通过源极驱动器的数字至模拟转换器(digital-to-analog converter,dac)和运算放大器(operational amplifier,op)输出。应注意,oled显示系统具有用于补偿oled的像素单元的劣化的环路。因此,通用源极驱动器具有感测通道和模拟至数字转换器(analog-to-digital converter,adc),以检测oled的劣化。然而,由于工艺和温度变化对源极驱动器集成电路(integrated circuit,ic)的影响,源极ic自身可具有ic与另一ic或ic自身之间的差异。在这方面,oled显示系统必须通过额外接口(例如lvds、i2c或定制协议)传输内部信息(例如状态机状态、位错误锁定状态)。换句话说,为了在面板和源极ic内部存取用于校准源极ic的特性的大量信息且在oled系统中执行劣化补偿,tcon需要使用大量算法、存储器硬件空间以及数据传输时间。因此,关于如何减小源极驱动与tcon之间的数据传输量以及减少定时控制器、存储器硬件空间以及补偿时间中的大量算法,下文提供数个实施例的解决方案。
技术实现要素:
3.本公开提供一种源极驱动器以及其校准方法,且能够动态地自校准用于感测显示面板的感测路径。
4.本公开的用于驱动并感测显示面板的源极驱动器包含感测电路、模拟至数字转换器电路以及数字运算电路。感测电路用于当源极驱动器在校准模式中操作时通过感测通道接收参考信号。模拟至数字转换器电路耦接至感测电路,且用于将参考信号转换为数字参考信号。数字运算电路耦接至模拟至数字转换器电路,且用于根据数字参考信号取得校准参数。当源极驱动器在感测模式中操作时,源极驱动器根据校准参数校准用于感测所述显示面板的感测路径。
5.本公开的校准方法适用于用于驱动并感测显示面板的源极驱动器。校准方法包含以下步骤。当源极驱动器在校准模式中操作时,参考信号由感测电路通过感测通道接收。参考信号由模拟至数字转换器电路转换为数字参考信号。由数字运算电路根据数字参考信号取得校准参数。当源极驱动器在感测模式中操作时,由源极驱动器根据校准参数校准用于感测所述显示面板的感测路径。
6.基于上文,根据本公开的源极驱动器以及其校准方法,源极驱动器能够在源极驱动器在校准模式中操作时取得用于感测路径的校准参数,且源极驱动器能够在源极驱动器在感测模式中操作时根据校准参数自校准感测路径。因此,本公开的源极驱动器可精确地感测例如显示面板的像素单元的劣化。
7.为了可更好地理解前述内容,以下详细地描述伴有附图的若干实施例。
附图说明
8.包含附图以便进一步理解本公开,且附图并入本说明书中并构成本说明书的一部分。图式示出本公开的示范性实施例,且与描述一起用来解释本公开的原理。
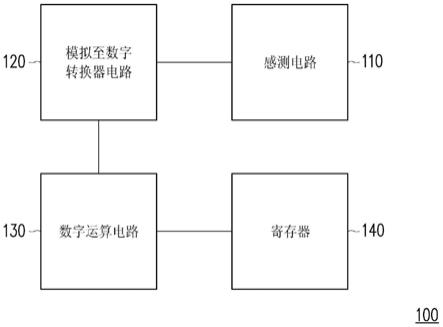
9.图1为示出根据本公开的实施例的源极驱动器的示意图。
10.图2为示出根据本公开的另一实施例的源极驱动器的示意图。
11.图3为示出根据本公开的实施例的耦接至像素单元的源极驱动器的示意图。
12.图4为示出根据本公开的实施例的多个特性曲线的示意图。
13.图5为示出根据本公开的实施例的校准方法的流程图。
14.附图标号说明
15.100,200,400:源极驱动器;
16.110,210:感测电路;
17.120,220:模拟至数字转换器电路;
18.130,230:数字运算电路;
19.140,240:寄存器;
20.200c:集成电路;
21.201_1~201_n:感测通道;
22.202_1~202_m:信号传输通道;
23.203_1~203_m:驱动通道;
24.204:开关电路;
25.250:驱动电路;
26.251:电压缓冲器;
27.252,260:逻辑控制器;
28.300:时序控制器;
29.500:像素单元;
30.501:有机发光二极管;
31.502:晶体管;
32.601:理想特性曲线;
33.602:实际特性曲线;
34.603:移位特性曲线;
35.610:偏移误差参数;
36.620:增益误差参数;
37.s1,s2,s3:开关;
38.s710,s720,s730,s740:步骤;
39.va,vb:参考电压。
具体实施方式
40.应理解,在不脱离本公开的范围的情况下,可以利用其它实施例,且可以作出结构
性改变。此外,应理解本文中所使用的措词和术语是出于描述的目的且不应被视为是限制性的。本文中使用“包含”、“包括”或“具有”及其变体意在涵盖其后列出的项目和其等效物以及额外项目。除非另有限制,否则术语“连接(connected)”、“耦合(coupled)”以及“安装(mounted)”以及其在本文中的变体是广义上使用的并且涵盖直接和间接连接、耦合以及安装。
41.图1为示出根据本公开的实施例的源极驱动器的示意图。参考图1,源极驱动器100包含感测电路110、模拟至数字转换器电路120、数字运算电路130以及寄存器140。感测电路110耦接至模拟至数字转换器电路120。模拟至数字转换器电路120耦接至数字运算电路130。数字运算电路130耦接至寄存器140。在本公开的实施例中,源极驱动器100用于驱动并感测显示面板,例如有机发光二极管(oled)显示面板。感测电路110进一步包含感测通道。感测通道耦接至显示面板的像素单元,且感测电路110用于当源极驱动器100在感测模式中操作时通过感测通道从显示面板的像素单元接收感测信号。
42.具体地说,在本公开的实施例中,源极驱动器100可通过源极驱动器100中的感测路径感测显示面板,但感测路径可具有一些非理想影响,由此在显示面板的感测结果中产生偏差。在本公开的实施例中,感测路径是感测电路110与模拟至数字转换器电路120之间的路径。因此,为了对显示面板的感测结果中的偏差进行校准,在源极驱动器100在感测模式中操作之前,源极驱动器100可在校准模式(自校准)中操作。
43.在本公开的实施例中,当源极驱动器100在校准模式中操作时,感测电路110通过感测通道接收参考信号。模拟至数字转换器电路120将参考信号转换为数字参考信号,且接着数字运算电路130根据至少一个数字参考信号取得校准参数。在本公开的一个实施例中,寄存器140可存储校准参数。因此,当源极驱动器100在感测模式中操作时,源极驱动器100可根据校准参数校准感测路径。此外,在本公开的一个实施例中,参考信号可以是来自电压源的固定电压,但本公开不限于此。换句话说,本公开的实施例的源极驱动器100能够自校准源极驱动器100中的感测路径,以精确地感测显示器的像素单元。
44.图2为示出根据本公开的另一实施例的源极驱动器的示意图。参考图2,源极驱动器200包含感测电路210、模拟至数字转换器电路220、数字运算电路230、寄存器240以及驱动电路250。在本公开的实施例中,感测电路210、模拟至数字转换器电路220、数字运算电路230、寄存器240以及驱动电路250整合到集成电路(integrated circuit,ic)200c中。感测电路210耦接至模拟至数字转换器电路220。模拟至数字转换器电路220耦接至数字运算电路230。数字运算电路230耦接至寄存器240。寄存器240耦接至逻辑控制器260。在本公开的实施例中,感测电路210包含耦接至显示面板的多个像素单元的多个感测通道201_1到感测通道201_n,其中n为大于1的正整数。驱动电路250包含耦接至显示面板的像素单元的多个驱动通道203_1到驱动通道203_m,其中m为大于1的正整数。
45.在本公开的实施例中,驱动电路250包含电压缓冲器251和逻辑控制器252。电压缓冲器251耦接至驱动通道203_1到驱动通道203_m。电压缓冲器251可包含多个缓冲器单元,因此逻辑控制器252通过多个信号传输通道202_1到信号传输通道202_m耦接至电压缓冲器251,且通过例如内部集成电路(inter integrated circuit,i2c)接口或低电压差分信号(low voltage differential signaling,lvds)接口进一步耦接至时序控制器(tcon)300。当源极驱动器200在驱动模式中操作时,逻辑控制器252从时序控制器300接收驱动电压数
据,且将多个驱动信号通过信号传输通道202_1到信号传输通道202_m输出到电压缓冲器251,使得电压缓冲器251将用于驱动显示面板的像素单元的驱动信号通过驱动通道203_1到驱动通道203_m输出到显示面板。另外,当源极驱动器200在正常校准模式中操作时,感测电路210可从感测通道201_1到感测通道201_n接收面板信息,且通过模拟至数字转换器电路220和数字运算电路230将面板信息提供或预存储到寄存器240。接着,寄存器240将面板信息进一步提供到逻辑控制器260,且逻辑控制器260将面板信息输出到时序控制器300。
46.在本公开的实施例中,感测电路210用于当源极驱动器200在感测模式中操作时通过感测通道201_1到感测通道201_n从显示面板的像素单元接收多个感测信号,且模拟至数字转换器电路220和数字运算电路230用于产生对应于感测信号的多个数字码,使得数字运算电路230可进一步提供数字码到时序控制器300以用于执行相关补偿驱动操作,例如调整驱动信号。应注意,当源极驱动器200通过感测通道201_1到感测通道201_n和感测电路210感测显示面板时,感测通道201_1到感测通道201_n和感测电路210可存在一些非理想影响,由此在显示面板的感测结果中产生偏差。因此,源极驱动器200必须对感测通道201_1到感测通道201_n和感测电路210进行校准。换句话说,为了对显示面板的感测结果中的偏差进行校准,在源极驱动器200在感测模式中操作之前,源极驱动器200可在校准模式中操作。
47.在本公开的实施例中,感测通道201_1到感测通道201_n可进一步耦接至驱动通道203_1到驱动通道203_m。如图2中所展示,驱动通道203_1到驱动通道203_m可通过安置在集成电路200c外部的一个迹线耦接至开关电路204的第一端子,感测通道201_1到感测通道201_n可通过安置在集成电路200c外部的另外多个轨迹耦接至开关电路204的第二端子。具体地说,当源极驱动器200在校准模式中操作时,源极驱动器200控制开关电路204,使得开关电路204接通。接着,逻辑控制器252从时序控制器300接收驱动电压数据,且根据驱动电压数据将至少一个参考信号输出到电压缓冲器251,使得电压缓冲器251将至少一个参考信号通过驱动通道203_1到驱动通道203_m中的至少一个输出到感测通道201_1到感测通道201_n和感测电路210,其中至少一个参考信号可以是固定电压。因此,模拟至数字转换器电路220将至少一个参考信号转换为至少一个数字参考信号。数字运算电路230根据至少一个数字参考信号取得至少一个校准参数。因此,当源极驱动器在感测模式中操作时,源极驱动器200可根据至少一个校准参数校准感测电路210与模拟至数字转换器电路220之间的感测路径。也就是说,本公开的实施例的源极驱动器200能够自校准源极驱动器200中的感测路径,以精确地感测显示器的像素单元。
48.此外,在本公开的一个实施例中,源极驱动器200可将校准参数存储到寄存器240中,使得寄存器240可输出预存储校准参数以供源极驱动器200在感测模式中校准感测路径。另外,当源极驱动器200在感测模式中或在驱动模式中操作时,源极驱动器200控制开关电路204,使得开关电路204断开。换句话说,本公开的实施例的源极驱动器200可控制开关电路204,以控制是否执行校准模式。
49.图3为示出根据本公开的实施例的耦接至像素单元的源极驱动器的示意图。图4为示出根据本公开的实施例的多个特性曲线的示意图。参考图3和图4,本公开的实施例的源极驱动器400可包含多个内部电路,例如上述实施例的源极驱动器200,且像素单元500包含有机发光二极管501和晶体管502。在本公开的实施例中,晶体管502的第一端子耦接至参考电压va,晶体管502的控制端子通过开关s1耦接至源极驱动器400的驱动通道,且晶体管502
的第二端子耦接至源极驱动器400的感测通道和有机发光二极管501的第一端子。有机发光二极管501的第二端子耦接至参考电压vb。源极驱动器400的感测通道通过开关s2耦接至有机发光二极管501的第一端子。源极驱动器400的感测通道通过开关s3耦接至源极驱动器400的驱动通道。应注意,图4的示意图包含理想特性曲线601、实际特性曲线602以及与源极驱动器400的感测路径有关的移位特性曲线603。
50.在本公开的实施例中,当源极驱动器400在校准模式中操作时,开关s1和开关s2断开且开关s3接通。源极驱动器400的驱动通道可将多个输入电压(多个参考信号)依序提供到源极驱动器400的感测通道,使得源极驱动器400可取得多个输出代码,其中输出代码可形成如图4中所展示的实际特性曲线602。因此,如图4中所展示,源极驱动器400的数字运算电路可通过比较分别对应于理想特性曲线601和实际特性曲线602的最小输出代码的两个输入电压之间的电压差来取得偏移误差参数610。接着,实际特性曲线602根据偏移误差参数610移位,以得到移位特性曲线603。因此,如图4中所展示,源极驱动器400的数字运算电路可通过比较分别对应于理想特性曲线601和移位特性曲线603的最大输出代码的两个输入电压之间的电压差来取得增益误差参数620。
51.在本公开的实施例中,源极驱动器400可存储包含偏移误差参数610和增益误差参数620的多个非理想参数,且根据所述非理想参数产生多个校准参数。在本公开的实施例中,当源极驱动器400在感测模式中操作时,开关s3断开且开关s1和开关s2接通。源极驱动器400的驱动通道可将测试电压提供到晶体管502,使得晶体管502根据测试电压驱动有机发光二极管501。接着,源极驱动器400可通过源极驱动器400的感测通道取得感测电压,其中已根据上述校准参数由源极驱动器400预校准源极驱动器400的感测通道。也就是说,源极驱动器400能够自校准源极驱动器400中的感测路径,以精确地感测像素单元500。
52.此外,在本公开的实施例中,当源极驱动器400在驱动模式中操作时,开关s2和开关s3断开且开关s1接通。源极驱动器400可例如用图2中的逻辑控制器260迅速地补偿驱动信号,且源极驱动器400的驱动通道将补偿的驱动电压提供到晶体管502,使得晶体管502根据补偿的驱动电压驱动有机发光二极管501。因此,源极驱动器400能够利用精确补偿的驱动电压精确地驱动像素单元500,以有效地解决像素单元500的劣化问题。
53.图5为示出根据本公开的实施例的校准方法的流程图。参考图1和图5,校准方法可至少适用于图1的源极驱动器100。在步骤s710中,当源极驱动器100在校准模式中操作时,感测电路110通过感测通道接收参考信号。在步骤s720中,模拟至数字转换器电路120将参考信号转换为数字参考信号。在步骤s730中,数字运算电路130根据数字参考信号取得校准参数。在步骤s740中,当源极驱动器100在感测模式中操作时,源极驱动器100根据校准参数校准用于感测显示面板的感测路径。因此,源极驱动器100能够根据校准参数实际上校准感测路径。另外,对于源极驱动器100的相关内部电路、实施例的源极驱动器100的实施细节和技术特征的足够教示和建议可从图1到图4的实施例的相关描述中获悉,且不再重复其细节。
54.综上所述,根据本公开的源极驱动器以及其校准方法,源极驱动器能够执行自校准以取得用于感测路径的校准参数以及根据校准参数校准感测路径。此外,源极驱动器进一步能够利用精确补偿的驱动电压精确地驱动像素单元,以有效地解决像素单元的劣化。因此,本公开的源极驱动器可有效地减小源极驱动与定时控制器之间的数据传输量,且可
有效地减少定时控制器、存储器硬件空间以及补偿时间中的大量算法。
55.所属领域的技术人员将显而易见,在不脱离本公开的精神或范围的情况下可对所公开的实施例作出各种修改和变化。鉴于前述内容,希望本公开涵盖修改和变化,只要所述修改和变化属于所附权利要求书和其等效物的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。