1.本发明属于浮标领域,尤其涉及一种浮标抛光机。
背景技术:
2.浮标是一种钓鱼用品,用于传递鱼吞食钓饵的信息:浮标反应十分灵敏,当鱼触碰、吞食饵钩时,饵钩的位置会发生变动,这种变动马上通过钓线传至浮标。
3.浮标制作过程中需要经过抛光、喷漆、上彩等工序。其中抛光步骤是用于对漂身进行抛光,而目前的抛光方式通常是人工进行抛光,导致抛光效率慢,且抛光效果残次不齐,因此需要一种能够对浮标实现自动上料、抛光和下料的自动抛光机器。
技术实现要素:
4.为解决上述问题,本发明公开了一种浮标抛光机。本发明实现了浮标的自送上料、抛光和下料,完成了浮标抛光的完全自动化过程,节省了人工,提高了工作效率。
5.为实现上述目的,本发明的技术方案为:
6.一种浮标抛光机,包括机架,所述机架上成形有用于放置浮标盘的物料放置区;所述机架上还安装有第一纵向移动机构,第一纵向移动机构连接有第一横向移动机构,第一横向移动机构连接有竖向移动机构,竖向移动机构连接有浮标夹具机构,所述机架上还安装有浮标抛光机构,浮标抛光机构两侧安装有标尾夹取旋转机构,所述标尾夹取旋转机构连接有伸拉装置。
7.进一步的改进,所述浮标夹具机构包括前端夹取机构和后端夹取机构;所述前端夹取机构和后端夹取机构结构相同,均包括旋转装置,旋转装置连接有机械夹。
8.进一步的改进,所述旋转装置为伺服电机,机械夹包括两个夹头,夹头前端形成有锥形部,中部成形有半圆形夹槽,夹头均固定连接有齿轮,两个齿轮相互啮合且其中一个齿轮连接有旋转气缸。
9.进一步的改进,所述齿轮轴接在安装板上,安装板的两个垂直面上均安装有磁块,旋转装置电连接有与磁块对应的磁力传感器。
10.进一步的改进,所述第一纵向移动机构包括处于机架上部两端的传送带,传送带上固定有连接块;所述第一横向移动机构为与连接块连接的水平直线电机,竖向移动机构为与水平直线电机相连的竖向直线电机。
11.进一步的改进,所述浮标抛光机构包括底座,底座上一侧安装有竖向连接杆,另一侧安装有抛光电机;抛光电机连接有第一带轮,竖向连接杆上连接有上带轮和下带轮;第一带轮、上带轮和下带轮通过抛光带动力连接;其中第一带轮处于上带轮和下带轮的中上部位置;底座连接有第二纵向移动机构,第二纵向移动机构连接有第二横向移动机构。
12.进一步的改进,所述第二纵向移动机构和第二横向移动机构均为丝杆机构、气缸或油缸。
13.进一步的改进,所述标尾夹取旋转机构包括导向帽,导向帽端部成形有锥形内凹
导向面,锥形内凹导向面底部成形有通孔;导向帽套设在套环上,套环前端沿周向安装有不少于两个夹块,夹块上成形有夹持凹槽,套环前端后端通过花键滑动连接有连接套,夹块中部固定有l杆,l杆后端与连接套铰接连接,顶部与套环内部铰接连接;连接套连接有旋转电机的电机轴;套环两侧安装有滑动夹块,滑动夹块滑动连接在调节板上,两个滑动夹块均连接有夹持气缸,所述调节板连接有伸拉气缸,伸拉气缸连接有固定板,固定板连接有基座。
14.进一步的改进,所述伸拉装置包括一端形成正螺纹,另一端形成反螺纹的正反螺纹杆;正反螺纹杆的正螺纹和反螺纹各螺纹连接一个标尾夹取旋转机构的基座,正反螺纹杆连接有动力电机,基座滑动连接在滑道上。
15.进一步的改进,所述物料放置区为两个。
16.本发明的优点:
17.1.本发明实现了浮标的自送上料、抛光和下料,完成了浮标抛光的完全自动化过程,提高了工作效率。
18.2.本发明设置两个夹取机构,从而实现抛光下料后可以马上上料,并在物料运输过程中完成浮标的抛光,大大提高了抛光效率。
19.3.本发明设置的标尾夹取旋转机构,能够对标尾进行有效固定并带动其旋转抛光,提高了抛光的稳定性。
20.4.本发明的浮标夹具机构设置有半圆形架空和锥形导向部,可以有效防止夹取浮标时由于定位不准确导致浮标夹具机构将浮标推折。
21.5.设置浮标盘,浮标盘上形成矩阵式的插孔,从而实现了浮标上料和下料的精确定位,保证了其自动化的运行。
22.6.设置初始位置,并且每次运动时均通过初始位置进行位置校正,有效防止了运动误差的积累,保证了运行过程的稳定性。
附图说明
23.图1为浮标抛光机的整体结构示意图;
24.图2为第一纵向移动机构、第一横向移动机构和竖向移动机构的结构示意图;
25.图3为机械夹的结构示意图;
26.图4为浮标抛光机构的结构示意图;
27.图5为标尾夹取旋转机构的结构示意图;
28.图6为标尾夹取旋转机构的剖面结构示意图;
29.图7为标尾夹取旋转机构与浮标抛光机构组合结构示意图。
具体实施方式
30.以下结合附图及实施例对本发明做进一步说明。
31.实施例
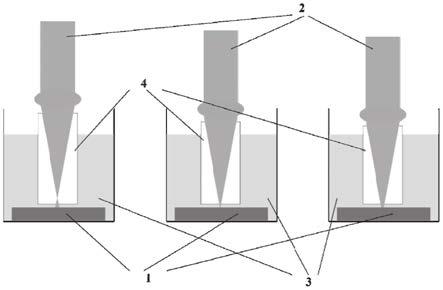
32.如图1所示的一种浮标抛光机,包括机架1、浮标盘2、物料放置区3、第一纵向移动机构4、第一横向移动机构5、竖向移动机构6、浮标夹具机构、浮标抛光机构7、标尾夹取旋转机构8和伸拉装置9。
33.如图2所示,其中第一纵向移动机构4包括处于机架1上部两端的传送带41,传送带
41上固定有连接块42;所述第一横向移动机构5为与连接块42连接的水平直线电机,竖向移动机构6为与水平直线电机相连的竖向直线电机。
34.第一纵向移动机构、第一横向移动机构和竖向移动机构用于实现浮标夹具机构的立体移动一体移动。
35.浮标盘2放置在物料放置区3,物料放置区3为两个,物料放置区3四角固定有l形限位块12用于对浮标盘2定位,浮标盘2上成形有若干成矩阵排列的用于插入浮标的竖向插孔。竖向插孔顶部形成有锥形凹槽。
36.浮标夹具机构包括前端夹取机构和后端夹取机构;所述前端夹取机构和后端夹取机构结构相同,均包括旋转装置10,旋转装置10连接有机械夹11。
37.旋转装置10用于在机械夹11夹住浮标的标尾移动到浮标抛光机构7前,将浮标放平,便于将浮标两端的标尾插入标尾夹取旋转机构8固定。
38.如图3所示,其中,旋转装置10为伺服电机,机械夹11包括两个夹头111,夹头111前端形成有锥形部112,中部成形有半圆形夹槽113,夹头111均固定连接有齿轮114,两个齿轮114相互啮合且其中一个齿轮114连接有旋转气缸115。
39.锥形部112便于夹取浮标时,浮标的标尾便于沿锥形部进入半圆形夹槽113被两个半圆形夹槽固定。其中夹取动作通过旋转气缸115控制,旋转气缸115带动一个齿轮转转,则两个齿轮相互相对或相反向运动,从而带动夹头111开合夹取。
40.齿轮114轴接在安装板116上,安装板116的两个垂直面上均安装有磁块117,旋转装置10电连接有与磁块117对应的磁力传感器118。磁块117和磁力传感器118相当于接近传感器,用于确定浮标抛光前是否已经旋转水平,以保证其能插入标尾夹取旋转机构8,或抛光完毕后插入浮标盘2时能保持竖直。
41.如图4所示,浮标抛光机构7包括底座71,底座71上一侧安装有竖向连接杆72,另一侧安装有抛光电机73;抛光电机73连接有第一带轮74,竖向连接杆72上连接有上带轮75和下带轮76;第一带轮74、上带轮75和下带轮76通过抛光带77动力连接;其中第一带轮74处于上带轮75和下带轮76的中上部位置。浮标抛光机构7优选设置为相对设置的两个,这样当有一个出现问题后,可以使用另一个进行抛光。
42.底座71连接有第二纵向移动机构79,第二纵向移动机构79连接有第二横向移动机构78。这样抛光电机73带动抛光带77对浮标进行抛光,且通过第二纵向移动机构79调节对浮标的压力使得其达到预设的抛光效果,同时第二横向移动机构78左右移动,从而调整对浮标的漂体的抛光位置,完成对漂体的抛光。
43.第二纵向移动机构79和第二横向移动机构78均为丝杆机构,也可以替换为气缸或油缸等。
44.如图5和图6所示,标尾夹取旋转机构8包括导向帽81,导向帽81端部成形有锥形内凹导向面82,锥形内凹导向面82底部成形有通孔83;导向帽81套设在套环84上,套环84前端沿周向安装有不少于两个夹块85,夹块85上成形有夹持凹槽86,套环84前端后端通过花键滑动连接有连接套87,夹块85中部固定有l杆88,l杆88后端与连接套87铰接连接,顶部与套环84内部铰接连接;连接套87连接有旋转电机89的电机轴810;套环84两侧安装有滑动夹块811,滑动夹块811滑动连接在调节板812上,两个滑动夹块811均连接有夹持气缸,所述调节板812连接有伸拉气缸813,伸拉气缸813连接有固定板814,固定板814连接有基座815。
45.导向帽81用于引导标尾插入通孔83然后插入套环84、连接套87和电机轴810预设的通孔内,标尾插入后,滑动夹块811被夹持气缸带动将套环84夹持,然后伸拉气缸813启动,带动套环84沿轴向正向移动,进入通过l杆88使得夹块85将标尾夹紧,滑动夹块811松开套环84,然后旋转电机89旋转带动浮标旋转,对漂体抛光。抛光完毕后,滑动夹块811夹紧套环84,然后沿轴向反向移动,松开标尾。
46.伸拉装置9包括一端形成正螺纹,另一端形成反螺纹的正反螺纹杆91;正反螺纹杆91的正螺纹和反螺纹各螺纹连接一个标尾夹取旋转机构8的基座815,正反螺纹杆91连接有动力电机92,基座815滑动连接在滑道816上。
47.本发明为了加快抛光效率,通过送料和取料一起进行,具体控制流程如下:
48.建立空间坐标系,并且对浮标夹具机构进行初始位置定位,初始位置定位上设置有接近定位开关,浮标夹具机构上的前端夹取机构取料时,自初始位置定位行动到待抛光浮标的浮标盘2上预设的第一浮标位置夹取浮标的标尾,然后回到初始位置定位,再向浮标抛光机构7平移,移动到浮标抛光机构7上方后,前端夹取机构的旋转装置10旋转九十度使得浮标水平,然后后端夹取机构先夹持住已经抛光完毕的浮标,标尾夹取旋转机构8松开浮标,并且向两侧外侧移动,第一纵向移动机构4带动前端夹取机构和后端夹取机构水平移动,使得前端夹取机构夹持的浮标处于标尾夹取旋转机构8之间,标尾夹取旋转机构8向内侧相向运动将标尾夹持固定,进行抛光,浮标夹具机构的后端夹取装置夹取抛光好的浮标返回初始位置,然后再移动将抛光好的浮标插入已抛光浮标的浮标盘2上第一浮标插入位置。进行下一轮取料抛光和将抛光好的浮标取回的动作。
49.上述方法通过设置每次运动均回初始位置定位,使得每次计算浮标夹具机构的运动距离时更加简便,且每次运动回到初始位置时通过接近定位开关定位,有效防止了机械运动时运动误差的积累。同时设置前端夹取机构和后端夹取机构,使得每次抛光下料后可以同时进行抛光上料,后端夹取机构将抛光物料放回和前段夹取机构夹取物料送料的时间进行抛光,从而有效克服了使用一个机械手结构导致的抛光机构需要等待机械手下料取料时间内不能进行抛光,导致的抛光效率低下的问题。
50.尽管本发明的实施方案已公开如上,但并不仅仅限于说明书和实施方案中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里所示出与描述的图例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。