1.本发明主要涉及收割机技术领域,主要涉及一种联合收割机活动卸粮口机构、卸粮装置及收割机。
背景技术:
2.现有的联合收割机是通过高位卸粮装置上的卸粮水平搅龙并通过该水平搅龙端部的固定出粮口把集粮箱里的粮食卸到运粮车的拖箱上,该水平搅龙能围绕收割机集粮箱作旋转和高低升降,出粮口与水平搅龙壳体相对固定,开口向下,出粮口相对于水平搅龙壳体之间无法活动。可见,现有的卸粮口结构限制了卸粮的方位。
3.现有国内稻麦联合收割机高位卸粮装置上的出粮口机构均与卸粮水平搅龙壳体固定连接,在进行卸粮作业时,出粮口只能随卸粮水平搅龙一起围绕收割机转动,限制了出粮位置,在粮食通过出粮口卸到运粮车拖箱上时,不能有效地充满拖箱各个角落,卸粮时拖箱存在充不满的死角,需要不断地移动收割机位置或通过不断移动运粮车的位置,才能有效地充满运粮车拖箱;也有的是通过人工拨粮进行,就是在进性作业时,在运粮车的拖箱上人工用粮铲把从出粮口卸下的粮食推向运粮车拖箱的死角,从而使粮食充满运粮车拖箱。这样,既影响了卸粮效率又浪费了人工,同时还存在安全隐患。
4.申请号为cn201920105234.0的中国专利(申请日为2019年8月28日),公开了一种卸粮口定位系统及定位方法和联合收获机,用于联合收获机高位卸粮时卸粮口的自动定位,包括承载视觉定位系统的卸粮系统和视觉自动定位系统;利用rgb
‑
d相机采集彩色图像和深度图像,经dsp图像处理器进行图像处理,再通过现场可编程逻辑门阵列fpga进行控制,最后驱动执行机构,可以实现卸粮口自动定位至粮车车厢中间位置,在粮车车厢内已有粮食的情况下将卸粮口定位至粮食较少的位置。但是这种移动都需要调整整个卸粮装置以移动卸粮口,移动并不方便。
5.申请号为cn201520032692.8的中国专利(申请日为2105年1月19日),公开了一种收割机粮仓出粮口开关,主要由接口、操作手柄、自锁凸轮、仓门、解锁手柄、夹袋组件、夹板和扭簧组成;所述的接口安装在收割机粮仓出粮口上;所述的操作手柄的转轴穿过接口设置在接口的中部;自锁凸轮设置在接口外的操作手柄的转轴上;仓门设置在接口内的操作手柄的转轴上;解锁手柄设置在接口上与自锁凸轮匹配相连;夹袋组件设置在接口下方的一侧,夹板设置在与夹袋组件相对应的接口上;操作手柄的转轴与接口的连接处设有扭簧。类似的,目前的专利也都集中于收割机整体设计,即使关注到卸粮口,也只是解决了开关的控制,仍然具有不方便的问题。
6.现有国内稻麦联合收割机上的卸粮口均与搅龙壳体固定连接,卸粮口与搅龙壳体无法相对运动,目前国内没有发现与本发明的矢量卸粮口相似的相关出粮口结构,本发明的卸粮口机构为全新的卸粮口结构。
技术实现要素:
7.1.发明要解决的技术问题
8.本发明的目的在于克服现有技术中的不足,现有卸粮口在进行卸粮作业时,卸粮口只能随水平出粮搅龙一起围绕收割机转动,粮食不能快速有效地充满拖箱各个角落的问题,如果采用人工拨粮,效率低且有安全隐患。
9.2.技术方案
10.为达到上述目的,本发明提供的技术方案为:
11.本发明的一种联合收割机活动卸粮口机构,安装于卸粮水平搅龙组件的末端,包括径向转动组件和轴向摆动组件;
12.径向转动组件一端连接于卸粮水平搅龙组件的末端,通过第一动力机构带动径向转动组件转动,径向转动组件能围绕卸粮水平搅龙组件的轴线转动;
13.轴向摆动组件连接于径向转动组件远离卸粮水平搅龙组件的一端,轴向摆动组件与径向转动组件通过固定框架连接,第二动力机构通过电动推杆座一和二链接在径向转动组件与轴向摆动组件之间,带动轴向摆动组件沿着卸粮水平搅龙组件的轴线方向摆动;
14.径向转动组件和轴向摆动组件都具有内腔,且内腔相连通,供粮食通过。
15.本发明形成一种可活动(矢量)卸粮口机构,在卸粮作业时,能任意改变出粮方向。
16.作为本发明进一步的改进,径向转动组件包括径向转动组件壳体,在径向转动组件壳体的一端为圆形的开口,在圆形的开口的周向设置有法兰盘,法兰盘通过转动法兰座与卸粮水平搅龙组件连接,法兰盘能够在转动法兰座内转动。
17.卸粮口机构能够绕着卸粮水平搅龙组件轴线在一定角度内自由转动。
18.作为本发明进一步的改进,第一动力机构为控制电机组件,在靠近卸粮水平搅龙组件的径向转动组件壳体的上方圆弧面上设有扇形齿圈,扇形齿圈与控制电机组件的电机齿轮啮合。
19.扇形齿圈的弧长与活动卸粮口机构的安全工作区域有关,当电机齿轮旋转超过一定角度后,与电机齿轮啮合的扇形齿圈的位置走到边缘,随后,扇形齿圈将不能再继续转动(只能反向转动),从而避免径向转动组件的转动超过一定限度而造成结构的干涉或者转动过大造成粮食卸到运粮车外部。
20.作为本发明进一步的改进,在靠近卸粮水平搅龙组件的径向转动组件的下方设有电动推杆座一,电动推杆座一用于连接第二动力机构。
21.作为本发明进一步的改进,轴向摆动组件包括固定框架和摆动组件壳体,固定框架与远离卸粮水平搅龙组件的径向转动组件的一端设置的固定接口连接,摆动组件壳体能够绕固定框架摆动。
22.卸粮口机构能够沿卸粮水平搅龙组件轴线方向摆动。
23.作为本发明进一步的改进,在轴向摆动组件壳体的靠近径向转动组件的一侧设有电动推杆座二,电动推杆座二用于连接第二动力机构。
24.作为本发明进一步的改进,在固定框架的两侧各设置有一轴销,轴销的外端插在轴承内,轴承与固定设置在摆动组件壳体壁面的轴承座配合,轴承和轴承座形成轴承及轴承座组件。
25.轴向摆动组件壳体能够绕销轴转动。
26.作为本发明进一步的改进,第二动力机构为电动推杆,电动推杆包括伸缩推杆和电动推杆缸体座,伸缩推杆在电动推杆缸体座约束下能够往复伸缩运动;伸缩推杆与轴向摆动组件连接,电动推杆缸体座与径向转动组件连接。
27.操纵电动推杆伸缩,带动卸粮口机构在沿卸粮水平搅龙组件轴线方向的一定角度内任意前后摆动。
28.作为本发明进一步的改进,摆动组件壳体的截面为矩形结构;摆动组件壳体的截面的一组对边各自所在壳体壁面用于设置轴承及轴承座组件,摆动组件壳体的截面的另一组对边所在的壳体壁面与固定框架有一段距离,该距离限制摆动组件的最大摆动幅度。
29.选用矩形截面,是因为制作与安装更方便,并且能够有效防止圆形截面的摆动组件壳体在摆动时与圆形截面的固定框架侧面之间发生的点接触,进而防止对摆动组件壳体或者固定框架造成损坏。矩形截面的摆动组件壳体和矩形截面的固定框架之间的接触,在极限位置时也依然为线接触,防止受力不均、应力集中导致的损害,也能够让摆动组件壳体摆动一个较大的幅度。
30.作为本发明进一步的改进,还包括出口,出口连接在摆动组件壳体下方。
31.出口可以为塑料材料,出口构件用螺栓与压板固定连接在摆动组件壳体上,以减小粮食冲击破损、降低噪声及起安全防护作用等。
32.本发明的一种卸粮装置,包括联合收割机活动卸粮口机构,还包括集粮箱和搅龙组件;
33.集粮箱用于临时存集由收割机脱粒清选后的干净的粮食;
34.搅龙组件包括垂直搅龙组件和卸粮水平搅龙组件;垂直搅龙组件的下端与集粮箱内水平搅龙相连,垂直搅龙组件的上端与卸粮水平搅龙组件的一端相连,卸粮水平搅龙组件远离垂直搅龙组件的一端与活动卸粮口机构连接。
35.实现集粮箱到卸粮的整套工作流程。
36.作为本发明进一步的改进,卸粮水平搅龙组件通过一段固定水平壳体与径向转动组件连接;固定水平壳体靠近卸粮水平搅龙组件一端设置有固定法兰座,固定法兰座与卸粮水平搅龙组件外端设置的法兰形成固定连接;固定水平壳体远离卸粮水平搅龙组件一端设置有转动法兰座,转动法兰座与径向转动组件壳体的一端的法兰盘转动连接;固定法兰座与转动法兰座之间为固定水平搅龙壳体焊合,在固定水平搅龙壳体焊合靠近转动法兰座的上方设置有控制电机座,控制电机座用于安装控制电机;控制电机带动电机齿轮旋转,电机齿轮再带动设置在靠近卸粮水平搅龙组件的径向转动组件壳体上方圆弧面上的扇形齿圈。
37.扇形齿圈的弧线长与活动卸粮口机构的安全工作区域有关,当电机齿轮旋转超过一定角度后,与电机齿轮啮合的扇形齿圈的位置走到边缘,随后,扇形齿圈将不再继续转动(只能向反向转动),从而避免径向转动组件的转动超过一定限度而造成结构的干涉或者转动过大造成粮食卸到运粮车外部。
38.本发明的一种收割机,包括卸粮装置,还包括收割机本体;
39.卸粮装置安装在收割机本体上,卸粮装置将粮食卸到运粮车上;
40.收割机本体收割过程和卸粮装置的卸粮过程依次进行;或收割机本体收割过程和卸粮装置的卸粮过程同步进行。
41.适应多种工作场景。
42.3.有益效果
43.采用本发明提供的技术方案,与现有技术相比,具有如下有益效果:
44.(1)本发明的联合收割机活动卸粮口机构,安装于卸粮搅龙组件的末端,包括径向转动组件和轴向摆动组件;径向转动组件能围绕卸粮水平搅龙组件的轴线转动,轴向摆动组件能沿着卸粮水平搅龙组件的轴线方向摆动。本发明形成一种可活动(矢量)卸粮口机构,在卸粮作业时,出粮口在水平投影面上可作360
°
方向任意调节,能任意改变出粮方向,能把粮食均匀地卸到运粮车拖箱的各个角落,不需要移动收割机或运粮车,更不需要人工拨粮,就能充分卸满运粮车拖箱,即使拖箱很长,也只需要移动1~2收割机或运粮车就行,大大地提高了收割机卸粮作业效率,节约了收割机作业成本,也消除了卸粮安全隐患。本发明结构设计合理,原理简单,便于推广使用。
45.(2)本发明的联合收割机活动卸粮口机构,在靠近卸粮水平搅龙组件的径向转动组件壳体的上方圆弧面上设有扇形齿圈,扇形齿圈与控制电机组件的电机齿轮啮合。扇形齿圈的弧长与活动卸粮口机构的安全工作区域有关,当电机齿轮旋转超过一定角度后,与电机齿轮啮合的扇形齿圈的位置走到边缘,随后,扇形齿圈将不再继续转动(只能向反向转动),从而避免径向转动组件的转动超过一定限度而造成结构的干涉或者转动过大造成粮食卸到运粮车外部。
46.(3)本发明的联合收割机活动卸粮口机构,电动推杆包括伸缩推杆和电动推杆缸体座,伸缩推杆在电动推杆缸体座约束下能够往伸缩复运动;伸缩推杆与轴向摆动组件连接,电动推杆缸体座与径向转动组件连接。操纵电动推杆伸缩,带动卸粮口机构在沿着卸粮水平搅龙组件轴线方向的一定角度内任意前后摆动。
47.(4)本发明的联合收割机活动卸粮口机构,轴向摆动组件壳体的截面为矩形结构;轴向摆动组件壳体的截面的一组对边各自所在壳体壁面用于设置轴承及轴承座组件,摆动组件壳体的截面的另一组对边所在的壳体壁面与固定框架有一段距离,该距离限制轴向摆动组件的最大摆动幅度。选用矩形截面,是因为制作与安装更方便,并且能够有效防止圆形截面的摆动组件壳体在摆动时与圆形截面的固定框架侧面之间发生的点接触,进而防止对轴向摆动组件壳体或者固定框架造成损坏。矩形截面的轴向摆动组件壳体和矩形截面的固定框架之间的接触,在极限位置时也依然为线接触,防止受力不均、应力集中导致的损害,也能够让轴向摆动组件壳体摆动一个较大的幅度。
48.(5)本发明的一种卸粮装置,包括联合收割机活动卸粮口机构,还包括集粮箱和搅龙组件;集粮箱用于临时存集由收割机脱粒清选后的干净的粮食;搅龙组件包括垂直搅龙组件和卸粮水平搅龙组件;垂直搅龙组件的下端与集粮箱内的水平搅龙相连,垂直搅龙组件的上端与卸粮水平搅龙组件的一端相连,卸粮水平搅龙组件远离垂直搅龙组件的一端与活动卸粮口机构连接。实现集粮箱到卸粮的整套工作流程。由于活动卸粮口装置与卸粮水平搅龙壳体是活动连接的,可以独立地相对于卸粮水平搅龙在水平投影面内作360
°
方向变动。在进行卸粮作业时,可以任意变动卸粮口出粮方向,能把粮食均匀地卸到运粮车拖箱的各个角落,不需要移动收割机或运粮车,更不需要人工拨粮。
49.(6)本发明的一种收割机,包括卸粮装置,还包括收割机本体;卸粮装置安装在收割机本体上,卸粮装置将粮食卸到运粮车上;收割机本体收割过程和卸粮装置的卸粮过程
可同步进行,在行进中,运粮车只需要和收割机本体保持相对固定的位置,即可实现装满,大大降低工作难度,提升工作效率;或收割机本体收割过程和卸粮装置的卸粮过程依次进行。能够适应多种工作场景。
附图说明
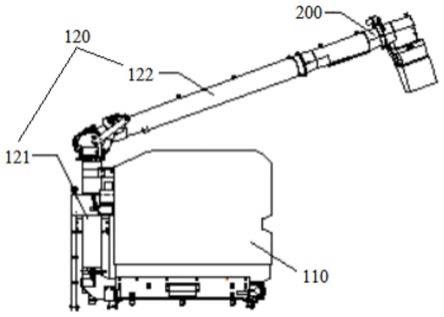
50.图1为本发明的卸粮装置示意图;
51.图2a为本发明的活动卸粮口机构主视图;
52.图2b为本发明的活动卸粮口机构侧视图;
53.图3a为本发明的卸粮水平搅龙壳体主视图;
54.图3b为本发明的卸粮水平搅龙壳体侧视图;
55.图4a为本发明的控制电机组件主视图;
56.图4b为本发明的控制电机组件侧视图;
57.图5为本发明的电动推杆示意图;
58.图6a为本发明的径向转动组件主视图;
59.图6b为本发明的径向转动组件侧视图;
60.图7a为本发明的轴向摆动组件侧视图;
61.图7b为本发明的轴向摆动组件主视图;
62.图8为本发明的活动卸粮口机构摆动示意图;
63.图9为本发明的活动卸粮口机构径向转动示意图;
64.图10为本发明的收割机卸粮工作示意图。
65.示意图中的标号说明:
66.100、卸粮装置;110、集粮箱;120、搅龙组件;121、垂直搅龙组件;122、卸粮水平搅龙组件;123、卸粮水平搅龙壳体;
67.124、固定法兰座;125、固定水平搅龙焊合;126、控制电机座;127、转动法兰座;
68.200、活动卸粮口机构;
69.210、控制电机组件;211、控制电机;212、电机齿轮;
70.220、电动推杆;221、伸缩推杆;222、电动推杆缸体座;223、第二连接部;224、第一连接部;
71.230、径向转动组件;231、径向转动组件壳体;232、电动推杆座一;233、扇形齿圈;234、法兰盘;235、固定接口;
72.240、轴向摆动组件;241、轴向摆动组件壳体;242、电动推杆座二;243、固定框架;244、销轴;245、轴承及轴承座组件;
73.250、出口;
74.300、收割机本体;
75.400、运输车。
具体实施方式
76.为进一步了解本发明的内容,结合附图和实施例对本发明作详细描述。
77.本说明书附图所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,
以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得以涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”等用语,亦仅为便于叙述的明了,而非用以限定可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
78.下面结合实施例对本发明作进一步的描述。
79.实施例1
80.结合图1,本实施例的一种联合收割机活动卸粮口机构,设置在搅龙组件120的末端,具体地说,搅龙组件120包括垂直搅龙组件121和卸粮水平搅龙组件122。活动卸粮口机构200包括两部分,一部分为能围绕卸粮水平搅龙组件122轴线作转动的径向转动组件230;另一部分为可沿着卸粮水平搅龙组件122轴线方向摆动的轴向摆动组件240。
81.请参见图6a和图6b,径向转动组件230包括径向转动组件壳体231,在径向转动组件壳体231的一端为圆形的开口,在圆形开口的周向设置有法兰盘234,请参见图3a和图3b,法兰盘234通过转动法兰座127与卸粮水平搅龙组件122连接,法兰盘234能够在转动法兰座127内转动,因此,径向转动组件230能够绕着卸粮水平搅龙组件122轴线转动。在靠近法兰盘234的径向转动组件壳体231的上方圆弧面上设有扇形齿圈233,请参见图2a、图2b、图4a和图4b,扇形齿圈233与控制电机组件210的电机齿轮212啮合,电机齿轮212旋转即通过扇形齿圈233带动径向转动组件230绕着卸粮水平搅龙组件122轴线转动。请参见图9,径向转动组件230绕着卸粮水平搅龙组件122轴线转动。优选的,扇形齿圈233的弧线长度与活动卸粮口机构200的安全工作区域有关,当电机齿轮212旋转超过一定角度后,与电机齿轮212啮合的扇形齿圈233的位置走到边缘,随后,扇形齿圈233将不再继续转动(只能反向转动),从而避免径向转动组件230的转动超过一定限度而造成结构的干涉或者转动过大造成粮食卸到运粮车外部。因此扇形齿圈233在传动功能之外还具有限位保护的功能。在靠近在靠近法兰盘234的径向转动组件壳体231的下方设有电动推杆座一232,电动推杆座一232用于连接电动推杆220。在远离法兰盘234的径向转动组件壳体231的一端的与卸粮水平搅龙组件122轴线垂直的向下方向上设置有固定接口235,固定接口235用于连接轴向摆动组件240。
82.优选的,电动推杆座一232焊接在径向转动组件壳体231上。
83.请参见图7a和图7b,轴向摆动组件240包括固定框架243和轴向摆动组件壳体241,固定框架243与固定接口245连接,即将轴向摆动组件240与径向转动组件240连接在一起。轴向摆动组件壳体241能够绕固定框架243摆动。在轴向摆动组件壳体241的靠近径向转动组件230的一侧设有电动推杆座二242,电动推杆座二242用于连接电动推杆220。
84.优选的,电动推杆座二242焊接在轴向摆动组件壳体241上。
85.优选的,在固定框架243的两侧各设置有一轴销244,轴销244的外端插在轴承内,轴承与固定设置在轴向摆动组件壳体241壁面的轴承座配合,轴承和轴承座形成轴承及轴承座组件245,轴向摆动组件壳体241能够绕销轴244转动。
86.优选的,轴销244焊接在固定框架243的两侧。
87.请参见图5,电动推杆220包括伸缩推杆221和电动推杆缸体座222,伸缩推杆221在电动推杆缸体座222约束下能够往复伸缩运动。在伸缩推杆221的外端部设有第二连接部
223,在电动推杆缸体座222外端部设有第一连接部224。第一连接部224与电动推杆座一232连接,第二连接部223与电动推杆座二242连接。优选的,第一连接部224与电动推杆座一232通过销轴连接,第一连接部224能够在电动推杆座一232内转动;第二连接部223与电动推杆座二242通过销轴连接,第二连接部223能够在电动推杆座二242内转动。请参见图8,伸缩推杆221伸长时,轴向摆动组件240向外摆动,伸缩推杆221缩回时,轴向摆动组件240向内摆动。
88.优选的,出口250连接在轴向摆动组件壳体241下方。
89.优选的,出口250为塑料材料,出口250构件用螺栓与压板固定连接在轴向摆动组件壳体241上,以减小粮食冲击破损、降低噪声及起安全防护作用等。
90.优选的,固定框架243与固定接口235设置为一体结构。
91.优选的,固定框架243的截面为矩形结构,便于安装对向设置的销轴244。
92.优选的,轴向摆动组件壳体241的截面为矩形结构。优选的,轴向摆动组件壳体241的截面的一组对边各自所在壳体壁面用于设置轴承及轴承座组件245,轴向摆动组件壳体241的截面的另一组对边所在的壳体壁面更为远离固定框架243,二者距离将限制轴向摆动组件240的最大摆动幅度。之所以优选为矩形截面,是因为制作与安装更方便,并且能够有效防止圆形截面的轴向摆动组件壳体241在摆动时与圆形截面的固定框架243侧面之间发生的点接触,进而防止对轴向摆动组件壳体241或者固定框架243造成损坏。矩形截面的轴向摆动组件壳体241和矩形截面的固定框架243之间的接触,在极限位置时也依然为线接触,防止受力不均、应力集中导致的损害,能够让轴向摆动组件壳体241摆动一个较大的幅度。
93.本实施例基本原理是采用相互垂直的两个转轴(“十”轴)链接机构,通过联动达到出口250的朝向矢量变动的目的。可用球面链接机构代替垂直交叉轴的连接机构;还可以采用软连接结构来实现等。
94.另外,对于上述的驱动机构,也有一些替代方案,如用双电机、双推杆等;或用单动力通过相应的连杆机构也能实现。
95.实施例2
96.请参见图1,本实施例的一种卸粮装置,包括实施例1的一种联合收割机活动卸粮口机构,还包括集粮箱110和搅龙组件120。
97.集粮箱110用于临时存集由收割机脱粒清选后的干净的粮食;搅龙组件110包括垂直搅龙组件121和卸粮水平搅龙组件122。垂直搅龙组件121的下端与集粮箱110内的水平搅龙相连,垂直搅龙组件121的上端与卸粮水平搅龙组件122的一端相连,卸粮水平搅龙组件122远离垂直搅龙组件121的一端与活动卸粮口机构200连接。工作过程中,粮食依次通过垂直搅龙组件121、卸粮水平搅龙组件122和活动卸粮口机构200。
98.请参见图2a和图2b,卸粮水平搅龙组件122外为卸粮水平搅龙壳体123,卸粮水平搅龙壳体123与径向转动组件230连接。在卸粮水平搅龙壳体123靠近径向转动组件230的一端的上方安装有控制电机组件210,控制电机组件210控制径向转动组件230绕卸粮水平搅龙组件122的轴线转动。
99.请参见图3a和图3b,卸粮水平搅龙组件122通过一段固定水平壳体与径向转动组件230连接。固定水平壳体靠近卸粮水平搅龙组件122一端设置有固定法兰座124,固定法兰
座与卸粮水平搅龙组件122外端设置的法兰形成固定连接。固定水平壳体远离卸粮水平搅龙组件122一端设置有转动法兰座127,转动法兰座127与法兰盘234转动连接。固定法兰座124与转动法兰座127之间为固定水平搅龙焊合125,在固定水平搅龙焊合125靠近转动法兰座127的上方设置有控制电机座126,控制电机座126用于安装控制电机211。
100.请参见图4a和图4b,控制电机组件210包括控制电机211和电机齿轮212,控制电机211带动电机齿轮212旋转,电机齿轮212再带动扇形齿圈233。
101.实施例3
102.本实施例的一种收割机,包括实施例2的一种卸粮装置,还包括收割机本体300。
103.请参见图10,收割机本体300可以是现有的联合收割机,联合收割机的一般作业过程为切割
→
输送
→
脱粒
→
清选
→
集粮
→
卸粮。收割机本体300完成切割、输送、脱粒、清洗的过程后将粮食存储到设置在收割机本体300上的卸粮装置100的集粮箱110内,之后再通过搅龙组件120和活动卸粮口机构200将粮食卸到运输车400上。
104.由于实施例的卸粮装置100中的搅龙组件120及其垂直搅龙组件121与卸粮水平搅龙组件122都是活动连接的,使卸粮水平搅龙组件122可以独立地相对于搅龙组件120在水平投影面内作360
°
方向变动。在进行卸粮作业时,可以任意变动出口250出粮方向,能把粮食均匀地卸到运粮车400拖箱的各个角落,不需要移动收割机本体300或运粮车400,更不需要人工拨粮,就能充分卸满运粮车400拖箱,即使拖箱很长,也只需要移动1~2次收割机本体300或运粮车400就行,大大地提高了收割机卸粮作业效率,节约了收割机作业成本,也消除了卸粮安全隐患。
105.需要说明的是,收割过程和卸粮过程可以同步进行,也可以依次进行,都不会影响本实施例的实现。
106.以上示意性的对本发明及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。所以,如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。