一种用于tbm无轨物料运输多功能胶轮车
技术领域
1.本实用新型涉及无轨运输车辆技术领域,特别是一种用于tbm无轨物料运输多功能胶轮车。
背景技术:
2.隧道是修建在地下或水下或山体中,用于铺设铁路或修筑公路供机动车辆通行的建筑物。根据其所在位置可分为山岭隧道、水下隧道和城市隧道三大类。
3.现有技术中,采用tbm技术进行隧道开挖时,常常通过胶轮车将仰拱预制块、钢拱架、喷射混凝土等物料运输至隧道tbm内。由于隧道tbm内空间狭小,胶轮车不便于掉头。
4.为解决上述问题,本领域技术人员将车架两端都设置驱动系统,分为第一驱动系统和第二驱动系统,所述第一驱动系统能够带动车架前进,所述第二驱动系统能够带动车架后退,已解决胶轮车不便于掉头的问题。
5.但是,驱动系统分为第一驱动系统和第二驱动系统,所以需要对第一驱动系统和第二驱动系统的车轮转向角度进行采集,现有技术中没有能够解决该问题的设备来直接使用。
技术实现要素:
6.本实用新型的发明目的在于:针对现有技术在隧道中使用物料运输胶轮车时,如何采集第一驱动系统车轮和第二驱动系统车轮的转向角度的问题,提供一种用于tbm无轨物料运输多功能胶轮车。
7.为了实现上述目的,本实用新型采用的技术方案为:
8.一种用于tbm无轨物料运输多功能胶轮车,包括车架和转向驱动桥,所述转向驱动桥的两端驱动连接有车轮,所述车架上设置有第一驱动系统和第二驱动系统,所述第一驱动系统能够带动所述车架前进,所述第二驱动系统能够带动所述车架后退,所述第一驱动系统和第二驱动系统均包括转向驱动桥,所有所述转向驱动桥均设置于所述车架上,所述转向驱动桥包括球笼壳、上拉杆和下拉杆,所述上拉杆和下拉杆的两端连于球笼壳内;
9.所有所述转向驱动桥均通过连接装置可拆卸安装有角度编码器,所述角度编码器用于采集对应所述转向驱动桥的转向角度;
10.所述连接装置包括支撑杆和连接架;所述支撑杆的一端固定于角度编码器中部,其另一端固定于球笼壳上,所述连接架的中部与角度编码器连接,所述连接架的下部两端分别与上拉杆和下拉杆连接。
11.上述方案中的前进和后退均相对于车架来说,前进和后退为相反的方向。
12.采用上述结构,通过连接装置来固定角度编码器测得转向驱动桥的转向角度,具体的为,支撑杆作为角度编码器的基础支撑固定于球笼壳上,当转向驱动桥转向时,转向驱动桥上的上拉杆和下拉杆会发生一个相对偏转,连接架的中部两端是分别连接于上拉杆和下拉杆上,进而会带动连接架产生一个旋转角度,连接架的顶部与角度编码器的连接头连
接,在连接架旋转的同时,角度编码器上的连接头也会旋转,从而实现角度编码器进行旋转角度的采集。
13.作为本实用新型的优选方案,所述第一驱动系统和所述第二驱动系统均包括动力系统和驾驶室,所述动力系统用于给整个车辆提供动力,所述驾驶室用于驾驶员的乘坐。
14.作为本实用新型的优选方案,所述驾驶室包括主驾驶室和副驾驶室,所述副驾驶室的底部铰接于主驾驶室的一侧,进而使副驾驶室绕铰接处可以整体进行转动,具体位置侧转90度至驾驶室外,便于使用车外的各种操作杆时,可以进行乘坐,例如仰拱预制块的卸载。
15.作为本实用新型的优选方案,所述车架的底部安装有油箱和液压油箱,所述油箱和液压油箱的外部壳体设有加热装置。
16.在油箱和液压油箱的底部还设有加热装置,可以避免在寒冷高原地区,因为气温较低而造成柴油以及液压油的凝固的问题。
17.作为本实用新型的优选方案,还包括混凝土罐,所述车架上设有液压驱动系统,所述液压驱动系统的输出端与所述混凝土罐驱动连接,且所述液压驱动系统能够带动所述混凝土罐转动。
18.采用上述方案,通过液压驱动系统带动混凝土罐不停的转动,可以避免混凝土在运输过程中的凝固。
19.作为本实用新型的优选方案,所述液压驱动系统还包括液压马达,所述液压马达的底部固定安装有液压马达支撑架,对液压马达形成一个支撑,防止掉落。
20.作为本实用新型的优选方案,所述车架上设有固定装置,所述固定装置为滑槽固定支架,所述混凝土罐的前后两端分别开设有滑槽,所述滑槽与滑槽固定支架的上表面滑动连接,这样能使混凝土罐能够在车架上良好的旋转。
21.作为本实用新型的优选方案,所述橡胶车轮采用实心轮胎,为满足隧道tbm中的净空尺寸。
22.作为本实用新型的优选方案,所述车架整体采用e级板焊接,所述车架靠近驾驶室的前后两端分别设有牵引钩,充分考虑了低温韧性、抗疲劳性能、冷冲压成形性能;车架靠近驾驶室的前后两端分别设有牵引钩,当车辆丧失动力时可实现牵引拖拽。所述车架的底部还设置有液压千斤顶,用于更换轮胎。
23.作为本实用新型的优选方案,所述第一驱动系统和第二驱动系统均包括自动驾驶系统;所述角度编码器与自动驾驶系统通讯连接;
24.所述自动驾驶系统能够根据角度编码器采集的信息控制转向驱动桥。
25.通过自动驾驶系统来调整第一驱动系统和第二驱动系统的转弯角度一致,从而避免第一驱动系统和第二驱动系统转向角度不一致,导致胶轮车容易发生运输事故。
26.作为本实用新型的优选方案,所述车架的四周设有测距传感器,所述测距传感器与自动驾驶系统通信连接。
27.通过测距传感器来辅助自动驾驶系统进行汽车对周围障碍物的一个判断。
28.另一方面,可以实现车头车尾的同时转向,且保持为同一角度,进而使汽车在一个方向上整体平移,避免了胶轮车在隧道内的大幅度转弯而造成的不便,实现胶轮车在狭小空间内的调度。
29.综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
30.1、采用本实用新型提供的结构,通过连接装置来固定角度编码器测得转向驱动桥的转向角度,具体的为,支撑杆作为角度编码器的基础支撑固定于球笼壳上,当转向驱动桥转向时,转向驱动桥上的上拉杆和下拉杆会发生一个相对偏转,连接架的中部两端是分别连接于上拉杆和下拉杆上,进而会带动连接架产生一个旋转角度,连接架的顶部与角度编码器的连接头连接,在连接架旋转的同时,角度编码器上的连接头也会旋转,从而实现角度编码器进行旋转角度的采集。
31.2.在油箱和液压油箱的底部还设有加热装置,可以避免在寒冷高原地区,因为气温较低而造成柴油以及液压油的凝固的问题。
32.3.该胶轮车还具有实现多功能运输的能力,在将混凝土罐拆卸下来后,在车架上的空旷位置即可装载仰拱预制块和钢拱架等物料,实现一车多用的目的。
附图说明
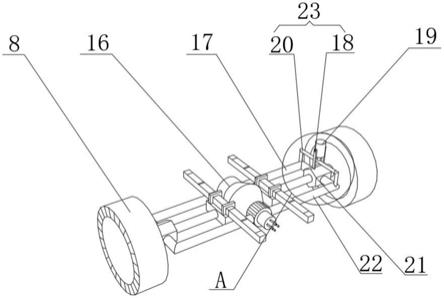
33.图1为本实用新型转向驱动桥和连接装置结构示意图;
34.图2为本实用新型图1中a处的放大图;
35.图3为本实用新型图1俯视图;
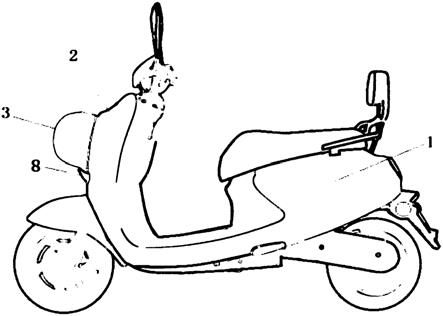
36.图4为本实用新型一种用于tbm无轨物料运输多功能胶轮车的整体结构示意图;
37.图5为本实用新型一种用于tbm无轨物料运输多功能胶轮车的正视图;
38.图6为本实用新型一种用于tbm无轨物料运输多功能胶轮车的仰视图;
39.图7为本实用新型一种用于tbm无轨物料运输多功能胶轮车装载仰拱预制块的整体结构示意图;
40.图中标记:1
‑
车架,2
‑
牵引钩,3
‑
驾驶室,4
‑
混凝土罐,5
‑
液压系统,6
‑
动力系统,7
‑
液压马达,8
‑
橡胶车轮,9
‑
滑槽固定支架,10
‑
滑槽,11
‑
测距传感器,12
‑
液压马达支撑架,13
‑
液压千斤顶,14
‑
油箱,15
‑
液压油箱,16
‑
转向驱动桥,17
‑
下拉杆,18
‑
支撑杆,19
‑
角度编码器,20
‑
连接架,21
‑
球笼壳,22
‑
上拉杆,23
‑
连接装置。
具体实施方式
41.下面结合附图,对本实用新型作详细的说明。
42.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
43.实施例1
44.如图1
‑
图6所示,本实用新型提供的一种用于tbm无轨物料运输多功能胶轮车,包括车架1和转向驱动桥16,所述转向驱动桥16的两端驱动连接有车轮8。
45.所述车架1上设置有第一驱动系统和第二驱动系统,所述第一驱动系统能够带动所述车架1前进,所述第二驱动系统能够带动所述车架1后退,实现车架1在狭窄的隧道内,调头困难的问题,需要进行哪个方向行驶时,对应启动第一驱动系统或第二驱动系统进行行驶。
46.所述转向驱动桥16设置于所述车架1上,所述转向驱动桥16上通过连接装置23可
拆卸安装有角度编码器19,所述角度编码器19用于采集所述转向驱动桥16的转向角度。
47.在上述装置中,所述转向驱动桥16包括球笼壳21、上拉杆22和下拉杆17,上拉杆22和下拉杆17整体类似为c形形状,上拉杆22和下拉杆17的两端对应连接于球笼壳21内。
48.所述连接装置23包括支撑杆18和连接架20;所述支撑杆18的一端固定于角度编码器19中部,支撑杆18另一端固定于球笼壳21上,支撑杆18给整个角度编码器19提供一个支撑。
49.所述连接架20类似于一种c形支架,所述连接架20的中部与角度编码器19连接,所述连接架20的下部两端分别与上拉杆22和下拉杆17连接,优选的连接于上拉杆22和下拉杆17的上表面。
50.在上述基础上,进一步优选的方式,角度编码器的型号为:rci 44r。
51.采用本实用新型提供的上述结构,在车架的前后两端分别设置了第一驱动系统和第二驱动系统,第一驱动系统和第二驱动系统均能够带动所述车架前进,这样在洞内运行时无需掉头即可实现前后运输,提高了工作人员的工作效率,提高了机动性能,能在狭窄的空间中进行调度。
52.另一方面,转向驱动桥16通过连接装置23安装有角度编码器19来实时监测车轮8转过的角度。
53.此外,通过连接装置23来固定角度编码器19测得转向驱动桥16的转向角度,具体的为,当转向驱动桥16转向时,转向驱动桥16上的上拉杆22和下拉杆17会发生一个相对偏转,连接架20的下部两端是分别连接于上拉杆22和下拉杆上17,进而会带动连接架20产生一个旋转角度,连接架20的中部与角度编码器19的连接头连接,在连接架20旋转的同时,角度编码器19上的连接头也会旋转,使角度编码器19进行旋转角度的采集。
54.所述第一驱动系统和所述第二驱动系统均包括动力系统6和驾驶室3,所述动力系统6用于给整个车辆提供动力,所述驾驶室3用于驾驶员的乘坐。
55.在上述基础上,进一步优选的方式,作为本实用新型的优选方案,所述驾驶室包括主驾驶室和副驾驶室,所述副驾驶室的底部铰接于主驾驶室的一侧,进而使副驾驶室绕铰接处可以整体进行转动,具体位置侧转90度至驾驶室外,便于使用车外的各种操作杆时,可以进行乘坐,例如仰拱预制块的卸载。
56.在上述基础上,进一步优选的方式,所述车架1的底部安装有油箱14和液压油箱15,所述油箱14和液压油箱15的外部壳体设有加热装置,可以避免在寒冷高原地区,因为气温较低而造成柴油以及液压油的凝固的问题,加热装置可选择电加热丝。
57.在上述基础上,进一步优选的方式,还包括混凝土罐4,所述车架1上设有液压驱动系统5,所述液压驱动系统5的输出端与所述混凝土罐4驱动连接,且所述液压驱动系统5能够带动所述混凝土罐4转动,通过混凝土罐4的转动,可以避免混凝土在运输过程中的凝固。
58.在上述装置中,所述动力系统6优选为燃油发动机,所述液压驱动系统还包括液压马达7,所述液压马达7的底部固定安装有液压马达支撑架12,对液压马达7形成一个支撑,防止掉落。
59.在上述装置中,车架1整体采用e级板焊接,充分考虑了低温韧性、抗疲劳性能、冷冲压成形性能;车架1前后两端分别设有牵引钩2,当车辆丧失动力时可实现牵引拖拽。
60.在上述装置中,车架1的底部还设置有液压千斤顶13,液压千斤顶13最好设置于靠
近驾驶室3的位置,或者两排车轮之间,用于更换轮胎。
61.在上述装置中,作为优选的是,车架1上设有固定装置,固定装置为滑槽固定支架9,滑槽固定支架9焊接固定于车架1上,混凝土罐4的前后两端分别开设有滑槽10,滑槽固定支架9的上表面能与滑槽10贴合紧密,滑槽10与滑槽固定支架9的上表面滑动连接,这样能使混凝土罐4在车架1上进行顺畅稳定的旋转。
62.在上述装置中,作为优选的是,橡胶车轮8采用实心轮胎,为满足隧道tbm中的净空尺寸,胶轮车可根据洞径、tbm内净空尺寸、需要的运载能力等边界条件选用,也可以根据工程需要进行针对性设计。
63.实施例2
64.如图7所示,在本实用新型实施例1的基础之上,提供另一种新的实施方式,可以将车架1上的液压马达7和混凝土罐4进行拆卸,拆卸过后的胶轮车,将可以进行运输其他物料,如图7所示运输的仰拱预制块,使整个胶轮车达到一个多功能运输的目的。
65.实施例3
66.如图1和图6所示,在实施例1的基础之上,所述第一驱动系统和第二驱动系统均包括自动驾驶系统;所述角度编码器19与自动驾驶系统通讯连接,所述自动驾驶系统能够根据角度编码器19采集的信息控制转向驱动桥16。
67.本实用新型采用的自动驾驶系统为cn108136977a中公开的“自动驾驶系统、自动驾驶控制方法、数据ecu以及自动驾驶ecu”,所述自动驾驶系统能够根据各传感器采集的信息控制转向驱动桥。
68.自动驾驶系统接收角度编码器19采集的车轮8转向角度信息,通过自动驾驶系统来调整使第一驱动系统和第二驱动系统的转弯角度一致,可以避免第一驱动系统和第二驱动系统由于转向角度不一致,导致胶轮车容易发生运输事故的问题。
69.在上述基础上,进一步优选的方式,所述车架的四周设有测距传感器,所述测距传感器与自动驾驶系统通信连接,通过测距传感器来辅助自动驾驶系统进行汽车对周围障碍物的一个判断。
70.优选的,测距传感器的型号为:mse
‑
led10。
71.另一方面,可以实现车头车尾的同时转向,且保持为同一角度,进而使汽车在一个方向上整体平移,避免了胶轮车在隧道内的大幅度转弯而造成的不便,实现胶轮车在狭小空间内的调度。
72.以上仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。