1.本发明属于牲畜屠宰技术领域,涉及一种牲畜屠宰用开腹装置。
背景技术:
2.目前,国内外中小型屠宰开腹设备基本采用传统人工操作,都是基于输送线传送,在输送线旁设置操作台,由操作人员站在站台上用分割刀对牲畜进行人工切割腹部操作。这种操作方式需要多个操作工人配合才能满足产能要求,不仅效率低下,而且劳动强度大,下脚料产出多,同时容易割破内脏,造成肉质污染。
3.有部分大企业采用进口的机器人开腹机进行牲畜的屠宰开腹,但这类设备结构复杂,且由于需要从国外进口,设备成本及维护成本高,而且设备一旦出现问题,企业很难解决问题,影响企业生产。
技术实现要素:
4.本发明的目的是提供一种牲畜屠宰用开腹装置,能够保证产品加工的标准化,给企业减员增效,也可避免人工剖腹划破牲畜内脏导致的食品安全稳患问题。
5.本发明的目的可以通过以下技术方案来实现:
6.一种牲畜屠宰用开腹装置,该装置包括并列设置的牲畜传送单元以及与牲畜传送单元相适配的同步锯切单元,该同步锯切单元包括同步行走机构、设置在同步行走机构底部的配重机构、设置配重机构底部的锯切导向机构以及设置在锯切导向机构上的锯切机构。在同步行走机构的作用下,同步锯切单元能够与牲畜传送单元同步向前运动,以进行边行走边开腹。
7.进一步地,所述的牲畜传送单元包括牲畜输送线轨道以及移动设置在牲畜输送线轨道上并用于悬挂牲畜的扁担钩。牲畜输送线轨道中,电机带动转轮,转轮带动链条,链条上的拨指推动扁担钩带动牲畜胴体向前运行。
8.进一步地,所述的牲畜输送线轨道上设有与扁担钩相适配的扁担钩位置传感器。扁担钩位置传感器检测扁担钩的运行位置,进而确定牲畜胴体的位置。
9.进一步地,所述的同步行走机构包括行走轨道以及设置在行走轨道上的同步行走气缸,所述的配重机构移动设置在行走轨道上,并与同步行走气缸传动连接。行走轨道与牲畜输送线轨道相适配。如果在剖腹时,牲畜胴体一直向前运行,同步行走气缸的活塞伸出或缩回,可带动配重机构及锯切导向机构、锯切机构沿着牲畜输送线轨道方向同步向前运动。
10.优选地,行走轨道上还设有气动控制组件,气动控制组件的电磁阀通过控制气流通、断或者改变压缩空气的流动方向,进而控制同步行走气缸活塞的伸出或者缩回。
11.进一步地,所述的配重机构包括移动设置在行走轨道上的配重支架、设置在配重支架上的配重件以及设置在配重件底部的支撑杆,所述的锯切导向机构设置在支撑杆上。在锯切导向机构的上方设置配重机构,并通过支撑杆相连,能够确保锯切导向机构在受到外部载荷时不发生倾斜现象,保证垂直度。
12.优选地,配重支架上设有行走轮,配重支架通过行走轮在行走轨道上向前运行。
13.进一步地,所述的锯切导向机构包括设置在支撑杆上的导向气缸安装架、沿竖直方向设置在导向气缸安装架上的导向气缸以及沿竖直方向设置在导向气缸安装架上的锯片导向板,所述的锯切机构移动设置在锯片导向板上,并与导向气缸传动连接。导向气缸优选为无杆气缸,通过活塞的上下运动带动锯切机构上下运动。
14.进一步地,所述的锯片导向板上开设有导向槽,该导向槽中设有导轮,所述的锯切机构与导轮相连。导向气缸带动锯切机构向下运动,导向槽对锯切机构的运动进行导向。导向槽由上至下呈弧形设计,是因为牲畜的腹部形状呈弧形,通过导向槽的弧形和牲畜胴体腹部形状保持一致,起到开腹的效果。
15.优选地,所述的锯片导向板上设有控制手柄,以便现场操作人员进行人工控制。
16.进一步地,所述的导向气缸的活塞上设有滑块,该滑块与锯切机构之间设有连接组件,该连接组件包括一上一下分别设置在滑块上的上旋转轴承及下旋转轴承、设置在下旋转轴承上的直线轴承、设置在锯切机构与上旋转轴承之间的上连杆以及设置在锯切机构与直线轴承之间的下连杆,所述的下连杆的一端穿过直线轴承。上连杆的一端连接上旋转轴承,下连杆的一端可在直线轴承中轴向运动,当导向气缸的活塞向下运动时,锯片也沿着导向槽向下运动,由于下连杆的一端可在直线轴承中来回轴向运动,因此可以避免锯片向下运动时因导向槽不同高度处与直线轴承的距离不一致造成的卡顿问题。
17.进一步地,所述的锯切机构包括锯片防护罩、设置在锯片防护罩中的锯片以及设置在锯片防护罩上并与锯片传动连接的锯片驱动电机。锯片防护罩两端安装轴承,轴承内圈与锯片及锯片驱动电机相连,轴承外圈连接导向槽中的导轮。锯片驱动电机带动锯片旋转,快速割开牲畜的腹部皮肤组织。锯片旋转时,锯片防护罩起到保护作用,防止意外。锯片驱动电机的速率可以调整,当开腹开到牲畜胸部时,需要把胸骨锯开,这时候需要更大的动力才能锯开胸骨,通过锯片驱动电机的速率满足切割要求。
18.进一步地,所述的锯片导向板上设有锯片起点位置传感器及锯片终点位置传感器,所述的锯切机构上设有辅助支撑杆。锯片起点位置传感器的高度大于锯片终点位置传感器的高度。锯片起点位置传感器、锯片终点位置传感器分别用于确定锯片的起点、终点位置。考虑到牲畜的个体差异,为了避免切割时划破牲畜内脏,在锯切机构上(优选为锯片下方位置)设置辅助支撑杆,对牲畜的腹部进行支撑。
19.优选地,该装置还包括plc控制柜,用于收集并整理各传感器传送的信号,检测牲畜胴体的位置,对同步锯切单元进行定位等。
20.本发明在实际应用时,通过牲畜输送线把牲畜胴体输送至同步锯切单元处,利用扁担钩位置传感器检测扁担钩的位置,即为牲畜胴体的位置;然后操作工人将同步锯切单元调整至靠近牲畜胴体处,并将锯片位置调整至起点,然后启动锯片驱动电机,使锯片旋转;接着启动导向气缸,使导向气缸的活塞从上向下运动,并通过连接组件带动锯片沿着导向槽弧线向下运动,旋转的锯片在向下运动的过程中对牲畜的腹部进行切割;当腹部完全切开后,锯片停止旋转,并使导向气缸的活塞复位,以待下次工作。
21.与现有技术相比,本发明具有以下特点:
22.1)本发明针对操作人员在实际操作过程中劳动强度大、容易产生污染、效率较低等问题,提供了一种牲畜屠宰用开腹装置,只需一个人即可快速完成牲畜开腹工作,提高了
效率,降低了操作人员的劳动强度,减少了交叉污染,提高了产品质量,且可以满足不同产能的生产线流水线;
23.2)本发明结合自动化手段对牲畜胴体进行检测、定位、剖腹等工作,通过检测牲畜胴体的位置信息反馈至plc控制柜,然后plc控制柜将信号传递至同步锯切单元,实现精确控制;
24.3)本发明能够提升现有开腹操作的自动化水平,一条屠宰线可以减少2
‑
3名操作人员,推广后可减少约2万名屠宰行业的操作人员,大幅提高屠宰效率和促进产业技术发展。
附图说明
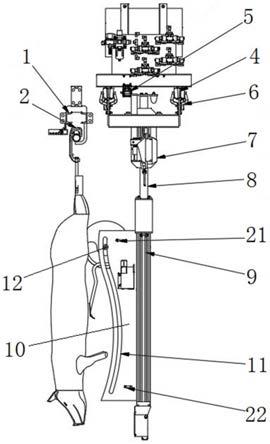
25.图1为本发明中锯片位于起点时的装置主视结构示意图;
26.图2为本发明中锯片位于起点时的装置后视结构示意图;
27.图3为本发明中锯片位于终点时的装置后视结构示意图;
28.图4为本发明中锯切导向机构的结构示意图;
29.图中标记说明:
30.1—牲畜输送线轨道、2—扁担钩、3—扁担钩位置传感器、4—行走轨道、5—同步行走气缸、6—配重支架、7—配重件、8—支撑杆、9—导向气缸、10—锯片导向板、11—导向槽、12—导轮、13—上旋转轴承、14—下旋转轴承、15—直线轴承、16—上连杆、17—下连杆、18—锯片防护罩、19—锯片、20—锯片驱动电机、21—锯片起点位置传感器、22—锯片终点位置传感器、23—辅助支撑杆。
具体实施方式
31.下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
32.实施例:
33.如图1、图2、图3所示的一种牲畜屠宰用开腹装置,包括并列设置的牲畜传送单元以及与牲畜传送单元相适配的同步锯切单元,该同步锯切单元包括同步行走机构、设置在同步行走机构底部的配重机构、设置配重机构底部的锯切导向机构以及设置在锯切导向机构上的锯切机构。
34.其中,牲畜传送单元包括牲畜输送线轨道1以及移动设置在牲畜输送线轨道1上并用于悬挂牲畜的扁担钩2。牲畜输送线轨道1上设有与扁担钩2相适配的扁担钩位置传感器3。
35.同步行走机构包括行走轨道4以及设置在行走轨道4上的同步行走气缸5,配重机构移动设置在行走轨道4上,并与同步行走气缸5传动连接。
36.配重机构包括移动设置在行走轨道4上的配重支架6、设置在配重支架6上的配重件7以及设置在配重件7底部的支撑杆8,锯切导向机构设置在支撑杆8上。
37.锯切导向机构包括设置在支撑杆8上的导向气缸安装架、沿竖直方向设置在导向气缸安装架上的导向气缸9以及沿竖直方向设置在导向气缸安装架上的锯片导向板10,锯
切机构移动设置在锯片导向板10上,并与导向气缸9传动连接。锯片导向板10上开设有导向槽11,该导向槽11中设有导轮12,锯切机构与导轮12相连。
38.如图4所示,导向气缸9的活塞上设有滑块,该滑块与锯切机构之间设有连接组件,该连接组件包括一上一下分别设置在滑块上的上旋转轴承13及下旋转轴承14、设置在下旋转轴承14上的直线轴承15、设置在锯切机构与上旋转轴承13之间的上连杆16以及设置在锯切机构与直线轴承15之间的下连杆17,下连杆17的一端穿过直线轴承15。
39.锯切机构包括锯片防护罩18、设置在锯片防护罩18中的锯片19以及设置在锯片防护罩18上并与锯片19传动连接的锯片驱动电机20。
40.锯片导向板10上设有锯片起点位置传感器21及锯片终点位置传感器22,锯切机构上设有辅助支撑杆23。
41.在实际应用时,通过牲畜输送线把牲畜胴体输送至同步锯切单元处,利用扁担钩位置传感器3检测扁担钩2的位置,即为牲畜胴体的位置;然后操作工人将同步锯切单元调整至靠近牲畜胴体处,并将锯片19位置调整至起点,然后启动锯片驱动电机20,使锯片19旋转;接着启动导向气缸9,使导向气缸9的活塞从上向下运动,并通过连接组件带动锯片19沿着导向槽11弧线向下运动,旋转的锯片19在向下运动的过程中对牲畜的腹部进行切割;当腹部完全切开后,锯片19停止旋转,并使导向气缸9的活塞复位,以待下次工作。
42.上述的对实施例的描述是为便于该技术领域的普通技术人员能理解和使用发明。熟悉本领域技术的人员显然可以容易地对这些实施例做出各种修改,并把在此说明的一般原理应用到其他实施例中而不必经过创造性的劳动。因此,本发明不限于上述实施例,本领域技术人员根据本发明的揭示,不脱离本发明范畴所做出的改进和修改都应该在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。