1.本发明涉及一种喷涂技术领域,具体是一种可识别工件厚度的智能往复喷涂设备。
背景技术:
2.传统往复的喷涂设备,需要人为去设定工件的厚度(在设备的控制面板上输入工件的厚度),设备的控制器接收人为设定工件厚度的信息,对对喷枪与工件之间高度间距进行调整,故只能一批同等厚度的工件在线喷涂作业,避免人为多次输入定工件的厚度信息。当更换不同厚度的工件,又需要重新人为设定工件的厚度,操作繁琐。因此有待进一步改进。
技术实现要素:
3.本发明的目的旨在提供一种配合三维扫描机构、图像处理器,不需要人为设定工件厚度,对喷枪与工件之间高度间距进行智能化调整的可识别工件厚度的智能往复喷涂设备,以克服现有技术中的不足之处。
4.按此目的设计的一种可识别工件厚度的智能往复喷涂设备,包括输送工件至喷涂室上的输送线、往复运动设置在喷涂室上的喷枪机构、及plc控制器与图像处理器,输送线包括输送台,输送台在工件沿喷涂室输送轨迹上,输送台上设有配合图像处理器计算工件厚度的三维扫描机构,三维扫描机构包括相对密闭的箱体,箱体与输送台之间设有定位装配结构,箱体通过定位装配结构固定在输送台上,喷枪机构包括控喷枪支架、设置在喷枪支架上的喷枪,喷枪机构还包括控制喷枪支架上下升降运动的喷枪升降模组,三维扫描机构部分、喷枪机构部分、图像处理器分别与plc控制器进行通信式的电性连接,plc控制器根据工件厚度进而控制喷枪支架的升降。
5.箱体为相对密闭的箱体,箱体内部相对漆黑。
6.三维扫描机构还包括设置在箱体内的遮光盒、及设置在遮光盒内的激光器与摄像机,箱体对应激光器投射工件的方向与摄像机对工件拍摄的方向上设有第一开口,激光器与摄像机分别与plc控制器进行通信式的电性连接。
7.遮光盒对应第一开口设有第二开口。
8.箱体、遮光盒上均设有用于引导线束的穿线孔。
9.遮光盒内设有固定激光器的第一固定支架,遮光盒内还设有固定摄像机的第二固定支架。
10.第一固定支架包括固定套、转动式穿插设置在固定套上的紧固件,激光器位于固定套上,紧固件的穿插端通过转动依次贯穿遮光盒并插入固定套上,且紧固件的穿插端与激光器接触。
11.可识别工件厚度的智能往复喷涂设备,还包括与三维扫描机构配合判定工件在输送线上相对位置的编码器,编码器与plc控制器进行通信式的电性连接,编码器设置在输送
线的主动辊上。
12.喷枪升降模组包括升降电机、升降螺杆、升降螺母,升降电机与升降螺杆传动连接,升降螺母套设在升降螺杆上,喷枪支架与升降螺母配合连接,升降电机与plc控制器进行通信式的电性连接。
13.喷涂室上设有控制喷枪机构纵向和/或横向往复运动的运动模组,运动模组包括提供动力的电机、供喷枪机构往复运动的导轨、齿条,喷枪机构部分设有与滑轨形成滑动配合的滑块、及设有与齿条啮合的齿轮,齿轮与运动模组的电机传动连接,运动模组的电机与plc控制器进行通信式的电性连接。
14.定位装配结构包括固定设置在输送台上的固定板、及固定设置在箱体上的固定块,固定板包括包覆输送台顶面部分的第一板体、及包覆输送台侧面部分的第二板体,第一板体与固定块固定连接。
15.本发明的有益效果如下:
16.可识别工件厚度的智能往复喷涂设备应用三维扫描机构、图像处理器,智能往复喷涂设备可以根据不同厚度的工件连续工作,取消人为设定工件厚度的操作,实现了智能柔性生产。
17.箱体、遮光盒上均设有用于引导线束的穿线孔,便于引导线束,实现电性连接。
18.三维扫描机构包括相对密闭的箱体,箱体与输送台之间设有定位装配结构,箱体通过定位装配结构固定在输送台上。三维扫描机构容易安装,定位装配结构容易加工、整机装配简单。
附图说明
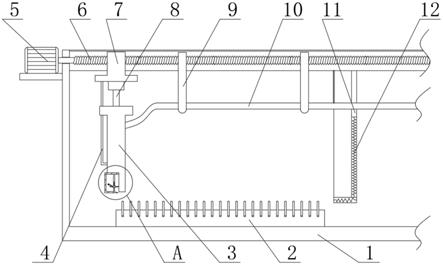
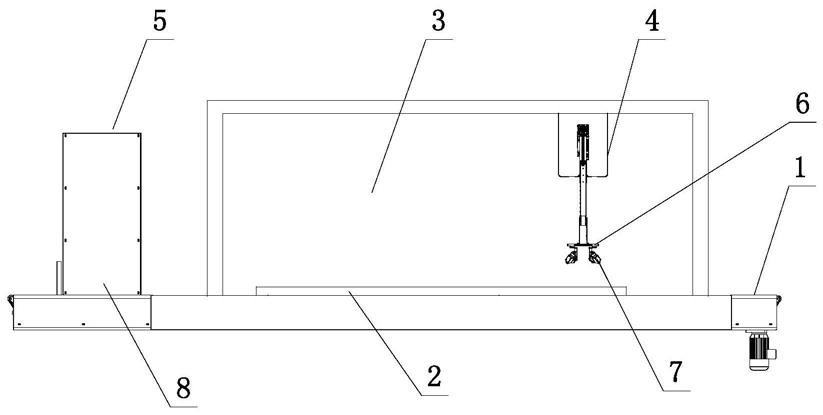
19.图1为本发明一实施例可识别工件厚度的智能往复喷涂设备的平面结构示意图。
20.图2为本发明一实施例输送台上设有三维扫描机构的结构示意图。
21.图3为本发明一实施例输送台上设有三维扫描机构的箱体内设有遮光盒的结构示意图。
22.图4为本发明一实施例遮光盒的结构示意图。
23.图5为本发明一实施例遮光盒内部结构示意图。
24.图6为本发明一实施例固定板部分平面结构示意图。
25.图7为本发明一实施例可识别工件厚度的智能往复喷涂设备的工作流程示意图。
26.图8为本发明一实施例可识别工件厚度的智能往复喷涂设备的工作原理图。
具体实施方式
27.下面结合附图及实施例对本发明作进一步描述。
28.参见图1
‑
图5,一种可识别工件厚度的智能往复喷涂设备,包括输送工件2至喷涂室3上的输送线1、往复运动设置在喷涂室3上的喷枪机构4、及plc控制器与图像处理器,输送线1包括输送台,输送台在工件2沿喷涂室3输送轨迹上,输送台上设有配合图像处理器计算工件2厚度的三维扫描机构5,三维扫描机构5包括相对密闭的箱体8,箱体8与输送台之间设有定位装配结构,箱体8通过定位装配结构固定在输送台上,喷枪机构4包括控喷枪支架6、设置在喷枪支架6上的喷枪7,喷枪机构4还包括控制喷枪支架6上下升降运动的喷枪升降
模组,三维扫描机构5部分、喷枪机构4部分、图像处理器分别与plc控制器进行通信式的电性连接,plc控制器根据工件2厚度进而控制喷枪支架6的升降。
29.输送线1还包括传动链轮、输送链条等。
30.三维扫描机构5还包括设置在箱体8内的遮光盒9、及设置在遮光盒9内的激光器10与摄像机11,箱体8对应激光器10投射工件2的方向与摄像机11对工件2拍摄的方向上设有第一开口12,激光器10与摄像机11分别与plc控制器进行通信式的电性连接。
31.遮光盒9对应第一开口12设有第二开口9.1。
32.在本实施例中,箱体8顶部的对应遮光盒9设有活动板,活动板包括第一活动板、第二活动板,第一活动板、第二活动板以穿线孔13为界呈左右两侧设置,第一活动板、第二活动板分别滑动式设置在箱体8顶部,当需要拆装遮光盒9时,第一活动板、第二活动分别通过滑动打开箱体8的顶部,然后就可以拆卸遮光盒9,当机器需要进行检修或更换零件时,不需要拆卸整个箱体8,便于后期维修、拆装等。
33.箱体8、遮光盒9上均设有用于引导线束的穿线孔13。
34.遮光盒9内设有固定激光器10的第一固定支架14,遮光盒9内还设有固定摄像机11的第二固定支架15。遮光盒9上设有固定耳,箱体8内对应固定耳设有固定梁,固定梁与固定耳固定连接。
35.第一固定支架14包括固定套、转动式穿插设置在固定套上的紧固件,激光器10位于固定套上,紧固件的穿插端通过转动依次贯穿遮光盒9并插入固定套上,且紧固件的穿插端与激光器10接触。
36.可识别工件厚度的智能往复喷涂设备,还包括与三维扫描机构5配合判定工件2在输送线1上相对位置的编码器,编码器与plc控制器进行通信式的电性连接,编码器设置在输送线1的主动辊上。
37.喷枪升降模组包括升降电机、升降螺杆、升降螺母,升降电机与升降螺杆传动连接,升降螺母套设在升降螺杆上,喷枪支架6与升降螺母配合连接,升降电机与plc控制器进行通信式的电性连接。
38.喷涂室3上设有控制喷枪机构4纵向和/或横向往复运动的运动模组,运动模组包括提供动力的电机、供喷枪机构4往复运动的导轨、齿条,喷枪机构4部分设有与滑轨形成滑动配合的滑块、及设有与齿条啮合的齿轮,齿轮与运动模组的电机传动连接,运动模组的电机与plc控制器进行通信式的电性连接。
39.定位装配结构包括固定设置在输送台上的固定板16、及固定设置在箱体8上的固定块17,固定板16包括包覆输送台顶面部分的第一板体、及包覆输送台侧面部分的第二板体,固定块17、输送台顶面分别与第一板体固定连接,输送台内部呈空腔状,输送台内部左右两内侧上设有固定梁,第二板体和固定梁通过螺栓穿插连接,箱体8牢固稳定地装配在输送台上。
40.参见图6,固定板16上设有转动的套管18与限位块19,限位块19与固定板16之间设有用于固定套管18的限位卡槽,套管18上设有伸缩的杆体20,当客商的地面不平整时,输送台出现放置不平稳,通常调整输送线1支撑脚与客商地面接触的距离,但这个距离有限,当调整的位置超出该距离时,需要用到垫块。故需要调整输送台的平稳位置时,位于限位卡槽的套管18通过转动离开限位卡槽,然后调整杆体20的伸缩长度,直至杆体20与地面接触,输
送台就可以放置平稳。套管18的转动点在不需要转动时通过螺钉进行锁紧,当需要转动时,螺钉松开,调节方便,杆体20与地面接触一端可设有弹性胶,弹性胶一方面防止杆体20一端磨损,弹性胶另一方面具有防震作用,减少机器产生的噪音。
41.参见图7,输送线1对工件2沿三维扫描机构进行输送,编码器与三维扫描机构5判定工件2相对位置,待工件到位感应后,plc控制器控制三维扫描机构5的摄像机11开始拍摄,以获取工件2图像信息,该图像信息传输至图像处理器,图像处理器根据图像信息进行对工件2建立三维模型,以获取工件2厚度,plc控制器根据图像处理器计算的工件厚度,plc控制器控制喷枪机构4的升降,以调整喷枪机构4的喷枪7与工件2之间的高度间距。
42.参见图8,三维扫描机构5识别工件2的厚度,工件2的厚度数据传输到plc控制器,plc控制器通知驱动喷枪机构升降高度的伺服电机动作,伺服电机驱动升降螺杆将喷枪7位置改变。
43.利用三维扫描机构5、图像处理器建立工件2的三维模型方法记载在中国专利文献号cn113074638a所公开的一种用于工件涂装的三维扫描系统及其扫描成像方法。故本实施例不再详述。
44.plc控制器根据工件2的三维模型控制喷枪机构4的喷涂轨迹。
45.此外,在本领域技术人员的公知常识上,固定连接包括焊接、螺钉紧固连接、铆接等方式。
46.上述为本发明的优选方案,显示和描述了本发明的基本原理、主要特征和本发明的优点。本领域的技术人员应该了解本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等同物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。