技术特征:
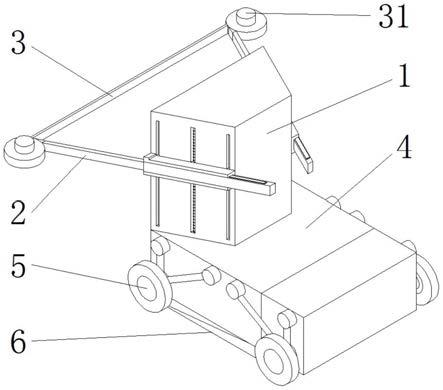
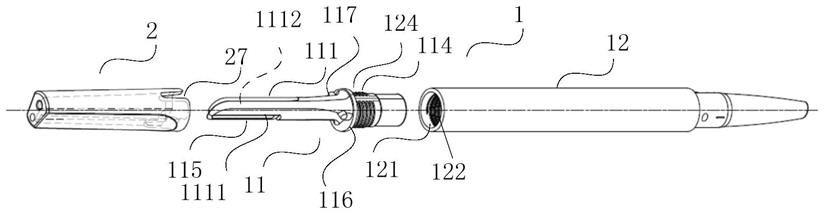
1.一种物联网用机器人收集长度调节装置,包括机器人的主体(1),其特征在于:所述主体(1)的横切面设置为梯形,所述主体(1)的两侧面活动安装有用于收集货物的伸缩臂(2),所述伸缩臂(2)与主体(1)的连接部位设置有活动机构(7),两个所述伸缩臂(2)之间设置有用于套接在货物上的伸缩带(3),所述伸缩带(3)的两端分别设置在两个伸缩臂(2)远离主体(1)的一端;所述主体(1)的下端固定安装有底座(4),所述底座(4)的两端分别设置有多个可伸缩的移动轮(5),所述底座(4)的下端活动安装有用于铲起货物的铲片(6)。2.根据权利要求1所述的一种物联网用机器人收集长度调节装置,其特征在于:所述伸缩臂(2)包括第一套筒(21),所述第一套筒(21)的一侧滑动安装有第二套筒(22),所述第二套筒(22)的内部滑动安装有第三套杆(23)。3.根据权利要求2所述的一种物联网用机器人收集长度调节装置,其特征在于:所述第一套筒(21)的侧壁内部转动安装有齿轮(211),所述第二套筒(22)的外侧壁固定安装有与齿轮(211)啮合的齿条(221),所述第二套筒(22)内部转动安装有第一丝杆(222),所述第三套杆(23)安装在第一丝杆(222)上且通过第一丝杆(222)转动而向第二套筒(22)一端伸出。4.根据权利要求1所述的一种物联网用机器人收集长度调节装置,其特征在于:所述活动机构(7)包括第一滑动块(71),所述第一滑动块(71)设置为多个且均匀排布固定安装在伸缩臂(2)的一侧,所述主体(1)开设有多个与第一滑动块(71)匹配的滑槽,所述滑槽内转动安装有用于移动第一滑动块(71)的第二丝杆(72),所述第一滑动块(71)安装在第二丝杆(72)上且通过第二丝杆(72)转动而移动。5.根据权利要求1所述的一种物联网用机器人收集长度调节装置,其特征在于:所述活动机构(7)包括第一转轴(73),所述主体(1)内部固定安装有用于驱动第一转轴(73)转动的电机,所述伸缩臂(2)的一侧固定安装有连接块(74),所述连接块(74)固定安装在第一转轴(73)的一端且随电机启动而转动。6.根据权利要求2所述的一种物联网用机器人收集长度调节装置,其特征在于:所述伸缩臂(2)远离主体(1)的一端固定安装有用于收纳伸缩带(3)的收纳盒(31),所述伸缩带(3)的一端从收纳盒(31)的侧壁伸出,所述收纳盒(31)内转动安装有用于收卷伸缩带(3)的第二转轴(32),所述收纳盒(31)的一端固定安装有用于转动第二转轴(32)的电机,所述伸缩带(3)的一端固定连接在第二转轴(32)的外侧壁且通过第二转轴(32)转动缠绕在第二转轴(32)的外侧壁上。7.根据权利要求6所述的一种物联网用机器人收集长度调节装置,其特征在于:所述移动轮(5)与底座(4)的连接部位设置有用于抬起主体(1)的伸缩杆(51)和用于固定移动轮(5)的连接杆(52),所述伸缩杆(51)、连接杆(52)与移动轮(5)、底座(4)之间的连接部位均设置有第三转轴(53)。8.根据权利要求7所述的一种物联网用机器人收集长度调节装置,其特征在于:所述铲片(6)上端固定安装有多个第二滑动块(61),所述底座(4)的下端开设有多个与第二滑动块(61)匹配的滑槽,所述滑槽内转动安装有用于移动铲片(6)的第三丝杆(62),所述第二滑动块(61)安装在第三丝杆(62)上且随第三丝杆(62)转动而移动。9.一种物联网用机器人收集长度调节装置的调节方法,根据权利要求8所述的一种物联网用机器人收集长度调节装置,其特征在于,包括如下步骤:
a1、通过活动机构(7)将伸缩臂(2)移动至主体(1)侧边的上端,伸长伸缩臂(2)与伸缩带(3),随后主体(1)通过移动轮(5)移动至所需收集货物前,再通过活动机构(7)使伸缩臂(2)下降,将货物套在主体(1)、伸缩臂(2)和伸缩带(3)围成的圈内,随后收缩伸缩臂(2)与伸缩带(3)对货物进行收集;a2、移动轮(5)通过伸缩杆(51)在底座(4)的侧边向上移动,带动主体(1)与底座(4)向下移动,使铲片(6)贴合地面,在伸缩臂(2)与伸缩带(3)进行收缩时,铲片(6)通过第三丝杆(62)从底座(4)的下端伸出铲起货物进行收集。
技术总结
本发明公开了一种物联网用机器人收集长度调节装置及其调节方法,涉及物联网机器人技术领域,包括机器人的主体,主体的横切面设置为梯形,主体的两侧面活动安装有用于收集货物的伸缩臂,伸缩臂与主体的连接部位设置有活动机构,两个伸缩臂之间设置有用于套接在货物上的伸缩带,伸缩带的两端分别设置在两个伸缩臂远离主体的一端,主体的下端固定安装有底座,底座的两端分别设置有多个可伸缩的移动轮,底座的下端活动安装有用于铲起货物的铲片,解决了现有的物联网机器人无法通过调节收集长度对不同大小的货物进行收集的问题。对不同大小的货物进行收集的问题。对不同大小的货物进行收集的问题。
技术研发人员:王艳艳 范斌 孙延庆 安超
受保护的技术使用者:南京蹑波物联网科技有限公司
技术研发日:2021.07.13
技术公布日:2021/11/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。