1.本实用新型涉及垃圾收集技术,具体地说是一种可自动更换垃圾桶的垃圾桶库。
背景技术:
2.目前设置在居民生活小区的一种垃圾收集站的基本结构形式为,在垃圾站建设的垃圾房上设置若干投放窗口(便于垃圾分类投放),垃圾房内每个投放窗口的后下方设有一垃圾桶。这种垃圾收集站存在的不足是:当每个投放窗口所对应的一个垃圾桶装满后,需要由人工及时的更换,对于管理垃圾站的工作人员来说,每天需要频繁的奔波于各小区的垃圾收集站之间,以便于及时更换垃圾桶,这样,一则要求有较多的工作人员,二则,工作人员的工作量较大。
3.为改变上述状况,中国专利申请号为2021203827064的专利申请提供了一种垃圾桶更换装置的基本结构为,上下对应布置的上层水平输送机构和下层水平输送机构安装于机架上,机架的前部及后部上分别设有一套夹持升降机构,机架上设有控制系统,上层水平输送机构、下层水平输送机构、夹持升降机构中具有的动力设备与控制系统相接。该垃圾桶更换装置可实现多个垃圾桶自动轮换盛装垃圾,大大提高垃圾收集点的储存量,它适合单台独立设置,也可多台组合设置,但在多台组合设置时,由于每装置所具有的夹持升降机构是各自独立的,设置成本稍显较大。
技术实现要素:
4.本实用新型的目的在于提供一种可自动更换垃圾桶的垃圾桶库,该垃圾桶库实现多组垃圾桶自动轮换盛装垃圾,大大提高垃圾收集点的储存量。
5.为了实现上述目的,本实用新型提供的垃圾桶更换装置采用以下方案:可自动更换垃圾桶的垃圾桶库,它具有一组水平移动装置,所述的水平移动装置具有机架、上层输送机构和下层输送机构,上层输送机构、下层输送机构分别安装在机架的上部及下部,各水平移动装置相互平行排列,在各水平移动装置的上方设有一框架,框架上装有一与其滑动配合的支承梁,框架上设有第一驱动机构,支承梁与第一驱动机构中的驱动构件联接,支承梁上装有一只以上与其滑动配合的滑套,支承梁上设有第二驱动机构,各滑套与第二驱动机构中的驱动构件联接,各滑套的下部连接有升降夹持机构,所述的可自动更换垃圾桶的垃圾桶库还具备有控制系统,控制系统分布在各水平移动装置的机架上、升降夹持机构上、或滑套上,上层输送机构、下层输送机构、第一驱动机构、第二驱动机构及升降夹持机构中的动力设备与控制系统相接。
6.本实用新型提供的垃圾桶更换装置在使用时,在各上层输送机构和下层输送机构上排列若干空垃圾桶,首先向各下层输送机构前端部上处于投放位置的垃圾桶中投放垃圾,当该垃圾桶中装满垃圾后,通过控制系统控制上层输送机构、下层输送机构、第一驱动机构、第二驱动机构及升降夹持机构的协调动作,将下层输送机构上的垃圾桶整体后移,将上层输送机构上的垃圾桶整体前移,并将上层输送机构排在第一位的空孔垃圾桶放在下层
输送机构前端部上,将下层输送机构上排在最后位的垃圾桶放在上层输送机构的后端部上,即可再次向下层输送机构前端部上的垃圾桶投放垃圾,不断重复上述过程,即可使所有垃圾桶依次装满垃圾。
7.本实用新型提供的垃圾桶库结构合理、性能可靠,它可提高垃圾收集点的垃圾存储量,大大延长垃圾桶的更换周期,并减少管理人员及其工作量。
附图说明
8.图1为本实用新型一实施例的结构示意图;
9.图2为图1的主视图;
10.图3为图2的右视图;
11.图4为图3的a向视图;
12.图5为本实用新型一实施例的使用状态示意图。
具体实施方式
13.以下结合实施例及附图进一步说明本实用新型。
14.参见图1、图2、图3、图4
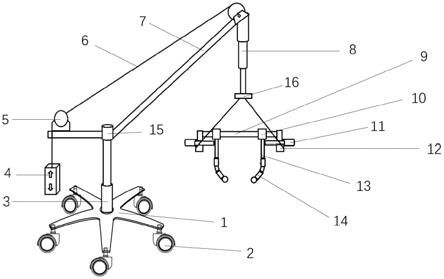
15.本实用新型提供的可自动更换垃圾桶的垃圾桶库具有一组水平移动装置,所述的水平移动装置具有机架23、上层输送机构9和下层输送机构24,上层输送机构9、下层输送机构24分别安装在机架23的上部及下部。各水平移动装置相互平行排列,在各水平移动装置的上方设有一框架7,框架7上装有一与其滑动配合的支承梁29,框架7上设有第一驱动机构,支承梁29与第一驱动机构中的驱动构件联接。支承梁29上装有一只以上与其滑动配合的滑套28,支承梁29上设有第二驱动机构,各滑套28与第二驱动机构中的驱动构件联接,各滑套的下部连接有升降夹持机构。所述的可自动更换垃圾桶的垃圾桶库还具备有控制系统,控制系统分布在各水平移动装置的机架23上、升降夹持机构上、或滑套28上及支承梁29上,上层输送机构、下层输送机构、第一驱动机构、第二驱动机构及升降夹持机构中的动力设备与控制系统相接。另外,框架7上连接有两只以上的立柱6,本垃圾桶库安置在垃圾房中,通过立柱6与垃圾房顶部联接,可完成框架7的固定。
16.本实施例中,所述的控制系统具有设于每一水平移动装置的机架上的第一传感器20、第二传感器22、第三传感器1,以及设于各上层输送机构9前方的第四传感器17、设于升降夹持机构上的第五传感器11、设于滑套28上的第六传感器27和一主控板21。第一传感器20、第二传感器22的探测端朝向下层输送机构24前端部的上方区域,第三传感器1的探测端朝向下层输送机构24后端部的上方区域,第四传感器17安装在与各机架固定的一横梁25上,第四传感器17的探测端朝向上层输送机构9前端部的上方区域,第五传感器11的探测端朝向上层输送机构9,支承梁29上位于滑套28的前方处固定有参照标记块26,第六传感器27的探测端朝向参照标记块26。主控板21安装在一水平移动装置的机架1上,各传感器为光电传感器、且均与主控板21相接,上层输送机构9、下层输送机构24、第一驱动机构、第二驱动机构及升降夹持机构中的动力设备与主控板21相接。
17.本实施例中,支承梁29的两端由框架7支承,且支承梁29的两端与框架7滑动配合,所述的第一驱动机构具有第一电机3、转轴30及两只第一传动链4,第一电机3、转轴30装于
框架7上,转轴30位于框架7的空腹中,第一电机3的输出轴与转轴30联接,转轴30的两端各装有一只第一主动链轮2,框架7上装有与两只第一主动链轮2分别配对的两只第一从动链轮5,每一第一传动链4分别装于配对的第一主动链轮2与第一从动链轮5上,两第一传动链4分别与支承梁29的两端联接,第一电机3与主控板21相接,第一电机3上装有编码器。通过主控板21控制第一电机3转动,第一电机3驱动转轴30带动第一传动链4移动,即可实现第一传动链4带动支承梁29在框架7上往复运动。通过主控板21、编码器可控制第一电机3每次转动的圈数,即可准确控制支承梁29每次移动的距离,确保滑套28上的升降夹持机构每次移动后与所对应的水平移动装置上排列的垃圾桶对准。
18.本实施例中滑套28为两只,两滑套28分别位于支承梁29的前部及后部上,第二驱动机构具有第二电机13、第二传动链10、第二主动链轮12、第二从动链轮8,第二电机13、第二主动链轮12及第二从动链轮8装于支承梁29上,第二电机13的输出轴与第二主动链轮12的轮轴联接,第二传动链10装于第二主动链轮12及第二从动链轮8上,两只滑套28与第二传动链10联接,第二电机13与主控板21相接。通过主控板21控制第二电机13转动,第二电机13驱动第二主动链轮12带动第二传动链10移动,即可由第二传动链10带动滑套28在支承梁29上往复运动。
19.参见图3
20.本实施例中,所述的升降夹持机构具有两只第一电动推杆32、两只第二电动推杆33、两只夹持爪34及一只挡板35,两只第一电动推杆32的两端分别与滑套28及挡板35相连,两只夹持爪34分别与挡板35的两侧铰接,每一第二电动推杆33的两端分别与一第一电动推杆32及夹持爪34铰接,各第一电动推杆32及各第二电动推杆33与主控板21相接。第五传感器11装在位于支承梁前部的升降夹持机构上的挡板35上。两第一电动推杆32可带动挡板35及两只夹持爪34升降,两第二电动推杆33可驱动两只夹持爪34张开或收拢,两只夹持爪34收拢或张开可完成对垃圾桶的夹持或放开。另外,第一电动推杆32可采用多级电动推杆。
21.本实施例中,所述的上层输送机构9、下层输送机构24均为皮带输送机。另外,上层输送机构9、下层输送机构24也可以为其他形式的输送机,如滚筒输送机,链条输送机,链板输送机、网带输送机等。
22.上述的各传感器的作用如下,第一传感器20用于检测下层输送机构24上排在第一位的垃圾桶中是否装满垃圾,第二传感器22用于检测下层输送机构24前端部上是否有垃圾桶,第三传感器1用于检测下层输送机构24后端部上是否有垃圾桶,第四传感器17用于检测上层输送机构9前端部上是否有垃圾桶,第五传感器11用于检测上层输送机构9上排在第一位的垃圾桶中是否装满垃圾,第六传感器27与参照标记块26及主控板配合,用于控制滑套28在支承梁上的位置,即控制升降夹持机构的位置。
23.参见图1、图2
24.本实施例中,在各水平移动装置前方分别设有一门扇19,在各机架23的前端固定有门柱14,门扇19的一侧与门柱14铰接,门扇19上开有投放窗口18,投放窗口18的边沿上铰接有窗扇16,窗扇16与门扇19之间铰接有第三电动推杆15,在门扇19正面上装有读码器31,读码器31及第三电动推杆15与主控板相接。
25.参见图1、图2、图3、图5
26.本实用新型提供的垃圾桶库在上层输送机构9、下层输送机构24上排列若干空垃
圾桶36,主控板21接通电源后使用时,用户由读码器31扫码认证后,主控板21控制第三电动推杆15将窗扇16打开,即可投放垃圾,经过一端时间,若没有人再投放垃圾,第三电动推15杆将窗扇15关闭。
27.当第一传感器20检测到某台水平移动装置的下层输送机构24上排在第一位的垃圾桶装满垃圾后,发出信息给主控板21,主控板21启动第一电机3,将支承梁29及两套升降夹持机构移动到该水平移动装置的正上方,然后,主控板21控制两套升降夹持机构,前方的升降夹持机构将上层输送机构9上排在第一位的垃圾桶36夹持后向上升起,后方的升降夹持机构将下层输送机构24上排在最后一位的垃圾桶夹持后向上升起,当第四传感器17检测到上层输送机构9前端部上没有垃圾桶,第三传感器1检测到下层输送机构24后端部上没有垃圾桶时,发出信号给主控板21,主控板21得到信号控制上层输送机构9及下层水平输送机构24,同步从的使上层各垃圾桶36向前方移动移动一个桶位、下层的各垃圾桶36向后方移动一个桶位,同时,主控板21控制两套升降夹持机构同步向前移动一个桶位后停止;当第二传感器22检测到下层输送机构24前端部上没有垃圾桶,发出信号给主控板21,主控板21再次启动两套升降夹持机构,将被夹持在前方的垃圾桶放在下层输送机构24前端部上,将被夹持在后方的垃圾桶放在上层输送机构9后端部上,随后即可由下层输送机构前端部上的垃圾桶继续接收投放垃圾。不断重复上述过程,当第五传感器11检测到某水平移动装置的上层水平输送机构9上排在第一位的垃圾桶36中装满垃圾时,说明该水平移动装置上所有垃圾桶均已装满垃圾,第五传感器11发出信号给主控板21,主控板21报警提示,然后,打开门扇19,将装满的垃圾桶移出,并更换上空的垃圾桶。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。