1.本发明涉及一种被配置为能对在主驱动轮与副驱动轮之间进行分配的驱动力的比例进行调节的四轮驱动车辆。
背景技术:
2.众所周知一种四轮驱动车辆,具备:驱动力源,至少包括发动机;驱动力分配装置,能将来自所述驱动力源的驱动力传递至主驱动轮和副驱动轮,并且能对作为在所述主驱动轮与所述副驱动轮之间进行分配的所述驱动力的比例的驱动力分配比进行调节;以及控制装置,进行调节所述驱动力分配比的驱动力分配控制,并且在规定的起动条件成立时进行使所述发动机自动起动的自动起动控制。例如,专利文献1中所记载的四轮驱动车辆正是如此。
3.现有技术文献
4.专利文献
5.专利文献1:国际公开第2011/042951号
6.再者,发动机以可传递动力的方式连接的驱动系统在为了具有由例如质量、扭转刚性决定的规定的共振转速而进行自动起动控制时,由于发动机的转矩变动的频率,会产生驱动系统的共振而使驱动系统的振动变大。这样一来,因这样的驱动系统的振动,nv恐怕会恶化。该nv是例如由车辆产生的噪声、乘客感受到的振动的总称。在如上所述的四轮驱动车辆中,驱动系统的质量、扭转刚性根据驱动力分配比而变化,因此驱动系统的共振转速会变化。因此,在如上所述的四轮驱动车辆中,存在如下问题:在进行自动起动控制时,容易产生因发动机的转矩变动而导致的驱动系统的共振,从而nv容易恶化。
技术实现要素:
7.本发明是将以上的情况作为背景而完成的,其目的在于提供一种四轮驱动车辆,该四轮驱动车辆能在进行自动起动控制时,抑制或防止由于驱动系统的振动变大而导致的nv的恶化。
8.用于解决问题的方案
9.第一发明的主旨在于,(a)一种四轮驱动车辆,具备:驱动力源,至少包括发动机;驱动力分配装置,能将来自所述驱动力源的驱动力传递至主驱动轮和副驱动轮,并且能对作为在所述主驱动轮与所述副驱动轮之间进行分配的所述驱动力的比例的驱动力分配比进行调节;以及控制装置,进行调节所述驱动力分配比的驱动力分配控制,并且在规定的起动条件成立时进行使所述发动机自动起动的自动起动控制,(b)所述控制装置是基于所述驱动力分配比来相对于规定起动时发动机转速变更所述自动起动控制中的所述发动机的完爆后的目标发动机转速的装置,将所述目标发动机转速设定为与所述发动机以能传递动力的方式连接的驱动系统的共振转速分离的转速。
10.此外,第二发明是在所述第一发明所述的四轮驱动车辆中,所述控制装置是将所
述目标发动机转速设定为以规定值的量与基于所述驱动力分配比计算出的所述驱动系统的共振转速分离的转速的装置,所述规定值是用于设定能抑制相对于所述规定起动时发动机转速的变更量并且能避免或抑制所述驱动系统的共振的产生的、所述目标发动机转速的预先确定的值。
11.此外,第三发明是在所述第一发明或第二发明所述的四轮驱动车辆中,所述规定起动时发动机转速是所述四轮驱动车辆中的能量效率成为最优的最佳发动机转速。
12.此外,第四发明是在所述第一发明至第三发明中任一项所述的四轮驱动车辆中,所述控制装置除了具有变更所述目标发动机转速的控制功能之外,还具有以使所述驱动系统的共振转速与所述规定起动时发动机转速分离的方式相对于未进行所述自动起动控制时的所述驱动力分配比变更进行所述自动起动控制时的所述驱动力分配比的控制功能,所述控制装置在进行所述自动起动控制时,基于车辆状态择一地进行所述目标发动机转速的变更和所述驱动力分配比的变更,并将所述目标发动机转速与所述驱动系统的共振转速分离。
13.此外,第五发明是在所述第四发明所述的四轮驱动车辆中,所述控制装置在加速操作量或驱动请求量为规定量以上时,通过所述目标发动机转速的变更来将所述目标发动机转速与所述驱动系统的共振转速分离,另一方面,在所述加速操作量或所述驱动请求量小于所述规定量时,通过所述驱动力分配比的变更来将所述目标发动机转速与所述驱动系统的共振转速分离。
14.此外,第六发明是在所述第四发明或第五发明所述的四轮驱动车辆中,所述控制装置在横摆角速度为规定角速度以上时,通过所述目标发动机转速的变更来将所述目标发动机转速与所述驱动系统的共振转速分离,另一方面,在所述横摆角速度小于所述规定角速度时,通过所述驱动力分配比的变更来将所述目标发动机转速与所述驱动系统的共振转速分离。
15.此外,第七发明是在所述第四发明至第六发明中任一项所述的四轮驱动车辆中,所述控制装置在转向角度为规定角度以上时,通过所述目标发动机转速的变更来将所述目标发动机转速与所述驱动系统的共振转速分离,另一方面,在所述转向角度小于所述规定角度时,通过所述驱动力分配比的变更来将所述目标发动机转速与所述驱动系统的共振转速分离。
16.此外,第八发明是在所述第四发明至第七发明中任一项所述的四轮驱动车辆中,所述控制装置在所述四轮驱动车辆为转弯行驶中时,通过所述目标发动机转速的变更来将所述目标发动机转速与所述驱动系统的共振转速分离,另一方面,在所述四轮驱动车辆为直行行驶中时,通过所述驱动力分配比的变更来将所述目标发动机转速与所述驱动系统的共振转速分离。
17.发明效果
18.根据所述第一发明,基于驱动力分配比来相对于规定起动时发动机转速变更自动起动控制中的目标发动机转速,目标发动机转速被设定为与驱动系统的共振转速分离的转速,因此会在进行自动起动控制时抑制或避免因发动机的转矩变动而导致的驱动系统的共振的产生。由此,能在进行自动起动控制时抑制或防止由于驱动系统的振动变大而导致的nv的恶化。
19.此外,根据所述第二发明,目标发动机转速被设定为以规定值的量与基于驱动力分配比计算出的驱动系统的共振转速分离的转速,因此会适当地抑制或避免因发动机的转矩变动而导致的驱动系统的共振的产生。此外,所述规定值是用于设定能抑制相对于规定起动时发动机转速的变更量并且能避免或抑制驱动系统的共振的产生的、目标发动机转速的预先确定的值,因此在进行自动起动控制时设为相对于规定起动时发动机转速的变更量被抑制的目标发动机转速,并且会适当地抑制或避免驱动系统的共振的产生。
20.此外,根据所述第三发明,所述规定起动时发动机转速是四轮驱动车辆中的能量效率成为最优的最佳发动机转速,因此通过相对于最佳发动机转速变更目标发动机转速而将目标发动机转速与驱动系统的共振转速分离。由此,能抑制能量效率的恶化,并且能抑制或防止nv的恶化。此外,如果目标发动机转速被设定为以规定值的量与驱动系统的共振转速分离的转速,则会设为从最佳发动机转速起的变更量被抑制的目标发动机转速,因此会适当地抑制能量效率的恶化。
21.此外,根据所述第四发明,在进行自动起动控制时,基于车辆状态择一地进行目标发动机转速的变更和驱动力分配比的变更,将目标发动机转速与驱动系统的共振转速分离,因此会在抑制或防止nv的恶化的基础上,抑制对车辆运动可控性的影响,并且抑制目标发动机转速相对于规定起动时发动机转速被变更。如果规定起动时发动机转速是最佳发动机转速,则会抑制能量效率的恶化。
22.此外,根据所述第五发明,在加速操作量或驱动请求量为规定量以上时,通过目标发动机转速的变更来将目标发动机转速与驱动系统的共振转速分离,因此在进行了急起步操作、急加速操作这样的状况下,与能量效率的提高相比,使通过驱动力分配控制实现的车辆运动可控性优先。另一方面,在加速操作量或驱动请求量小于规定量时,通过驱动力分配比的变更使目标发动机转速与驱动系统的共振转速分离,因此在起步操作、加速操作缓慢这样的状况下,与通过驱动力分配控制实现的车辆运动可控性相比,使能量效率的提高优先。由此,会在抑制或防止nv的恶化的基础上,抑制对车辆运动可控性的影响,并且抑制目标发动机转速相对于规定起动时发动机转速被变更。如果规定起动时发动机转速是最佳发动机转速,则会抑制能量效率的恶化。
23.此外,根据所述第六发明,在横摆角速度为规定角速度以上时,通过目标发动机转速的变更来使目标发动机转速与驱动系统的共振转速分离,因此在车辆姿势的变化大这样的状况下,与能量效率的提高相比,使通过驱动力分配控制实现的车辆运动可控性优先。另一方面,在横摆角速度小于规定角速度时,通过驱动力分配比的变更来使目标发动机转速与驱动系统的共振转速分离,因此在车辆姿势的变化小这样的状况下,与通过驱动力分配控制实现的车辆运动可控性相比,使能量效率的提高优先。由此,会在抑制或防止nv的恶化的基础上,抑制对车辆运动可控性的影响,并且抑制目标发动机转速相对于规定起动时发动机转速被变更。如果规定起动时发动机转速是最佳发动机转速,则会抑制能量效率的恶化。
24.此外,根据所述第七发明,在转向角度为规定角度以上时,通过目标发动机转速的变更来使目标发动机转速与驱动系统的共振转速分离,因此在车辆姿势的变化大这样的状况下,与能量效率的提高相比,使通过驱动力分配控制实现的车辆运动可控性优先。另一方面,在转向角度小于规定角度时,通过驱动力分配比的变更来使目标发动机转速与驱动系
统的共振转速分离,因此在车辆姿势的变化小这样的状况下,与通过驱动力分配控制实现的车辆运动可控性相比,使能量效率的提高优先。由此,会在抑制或防止nv的恶化的基础上,抑制对车辆运动可控性的影响,并且抑制目标发动机转速相对于规定起动时发动机转速被变更。如果规定起动时发动机转速是最佳发动机转速,则会抑制能量效率的恶化。
25.此外,根据所述第八发明,在四轮驱动车辆为转弯行驶中时,通过目标发动机转速的变更来使目标发动机转速与驱动系统的共振转速分离,因此在车辆姿势的变化大这样的状况下,与能量效率的提高相比,使通过驱动力分配控制实现的车辆运动可控性优先。另一方面,在四轮驱动车辆为直行行驶中时,通过驱动力分配比的变更来使目标发动机转速与驱动系统的共振转速分离,因此在车辆姿势的变化小这样的状况下,与通过驱动力分配控制实现的车辆运动可控性相比,使能量效率的提高优先。由此,会在抑制或防止nv的恶化的基础上,抑制对车辆运动可控性的影响,并且抑制目标发动机转速相对于规定起动时发动机转速被变更。如果规定起动时发动机转速是最佳发动机转速,则会抑制能量效率的恶化。
附图说明
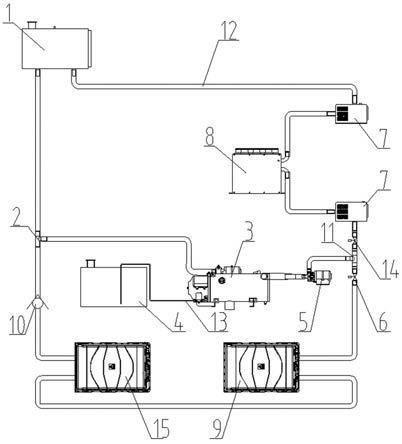
26.图1是说明应用本发明的四轮驱动车辆的概略构成的图,并且是说明四轮驱动车辆中的用于各种控制的控制功能和控制系统的主要部分的图。
27.图2是说明图1的自动变速器的概略构成的图。
28.图3是说明图2的机械式有级变速部的变速工作与用于该变速工作的接合装置的工作的组合的关系的工作图表。
29.图4是表示图2的电动式无级变速部和机械式有级变速部中的各旋转元件的转速的相对关系的共线图。
30.图5是说明图1的分动器的构造的骨架图。
31.图6是表示用于有级变速部的变速控制的at挡位变速映射图和用于行驶模式的切换控制的行驶模式切换映射图的一个例子的图,是表示各自的关系的图。
32.图7是说明电子控制装置的控制工作的主要部分的流程图,是说明用于实现能在进行自动起动控制时抑制或防止由于驱动系统的振动变大而导致的nv的恶化的四轮驱动车辆的控制工作的流程图。
33.图8是说明基于加速器开度择一地进行起动时目标发动机转速的变更和后轮侧分配率的变更的方案的一个例子的图。
34.图9是说明基于横摆角速度择一地进行起动时目标发动机转速的变更和后轮侧分配率的变更的方案的一个例子的图。
35.图10是说明基于转向角度择一地进行起动时目标发动机转速的变更和后轮侧分配率的变更的方案的一个例子的图。
36.图11是说明基于是转弯行驶中还是直行行驶中择一地进行起动时目标发动机转速的变更和后轮侧分配率的变更的方案的一个例子的图。
37.附图标记说明:
38.10:四轮驱动车辆,
39.12:发动机(驱动力源),
40.14(14l、14r):前轮(副驱动轮),
41.16(16l、16r):后轮(主驱动轮),
42.30:分动器(驱动力分配装置),
43.130:电子控制装置(控制装置)。
具体实施方式
44.以下,参照附图对本发明的实施例进行详细说明。
45.[实施例1]
[0046]
图1是说明应用本发明的四轮驱动车辆10的概略构成的图,并且是说明四轮驱动车辆10中的用于各种控制的控制系统的主要部分的图。在图1中,四轮驱动车辆10是具备发动机12(参照图中的“eng”)、第一旋转机mg1以及第二旋转机mg2来作为驱动力源的混合动力车辆。如此,四轮驱动车辆10是具备至少包括发动机12的驱动力源的车辆。此外,四轮驱动车辆10具备左右一对前轮14l、14r、左右一对后轮16l、16r以及将来自发动机12等的驱动力分别向前轮14l、14r和后轮16l、16r传递的动力传递装置18。后轮16l、16r是在二轮驱动行驶中和四轮驱动行驶中均作为驱动轮的主驱动轮。此外,前轮14l、14r是在二轮驱动行驶中作为从动轮、在四轮驱动行驶中作为驱动轮的副驱动轮。四轮驱动车辆10是以fr(前置发动机/后轮驱动)方式的车辆为基础的四轮驱动车辆。在本实施例中,在不特殊地加以区别的情况下,将前轮14l、14r称为前轮14,将后轮16l、16r称为后轮16。此外,在不特殊地加以区别的情况下,将发动机12、第一旋转机mg1以及第二旋转机mg2仅称为驱动力源pu。
[0047]
发动机12是四轮驱动车辆10的行驶用的驱动力源,是汽油发动机、柴油发动机等公知的内燃机。发动机12通过后述的电子控制装置130来控制包括四轮驱动车辆10所具备的节气门致动器、燃料喷射装置、点火装置等的发动机控制装置20,由此来控制作为发动机12的输出转矩的发动机转矩te。
[0048]
第一旋转机mg1和第二旋转机mg2是具有作为电动机(马达)的功能和作为发电机(generator)的功能的旋转电力机械,是所谓的电动发电机。第一旋转机mg1和第二旋转机mg2是可以成为四轮驱动车辆10的行驶用的驱动力源的旋转机。第一旋转机mg1和第二旋转机mg2分别经由四轮驱动车辆10所具备的变换器22连接于四轮驱动车辆10所具备的电池24。在第一旋转机mg1和第二旋转机mg2分别通过后述的电子控制装置130来控制变换器22,由此来控制作为第一旋转机mg1的输出转矩的mg1转矩tg和作为第二旋转机mg2的输出转矩的mg2转矩tm。关于旋转机的输出转矩,例如在正转的情况下,作为加速侧的正转矩是动力运行转矩,作为减速侧的负转矩是再生转矩。电池24是与第一旋转机mg1和第二旋转机mg2的每一个之间授受电力的蓄电装置。第一旋转机mg1和第二旋转机mg2设于作为装配在车身的非旋转构件的变速箱26内。
[0049]
动力传递装置18具备作为混合动力用的变速器的自动变速器28(参照图中的“hv用t/m”)、分动器30(参照图中的“t/f”)、前传动轴32、后传动轴34、前轮侧差动齿轮装置36(参照图中的“fdiff”)、后轮侧差动齿轮装置38(参照图中的“rdiff”)、左右一对前轮车轴40l、40r以及左右一对后轮车轴42l、42r。在动力传递装置18中,经由自动变速器28传递的来自发动机12等的驱动力从分动器30起依次经由后传动轴34、后轮侧差动齿轮装置38、后轮车轴42l、42r等向后轮16l、16r传递。此外,在动力传递装置18中,当传递至分动器30的来自发动机12的驱动力的一部分向前轮14l、14r侧分配时,该分配的驱动力依次经由前传动
轴32、前轮侧差动齿轮装置36、前轮车轴40l、40r等向前轮14l、14r传递。
[0050]
图2是说明自动变速器28的概略构成的图。在图2中,自动变速器28具备在变速箱26内串联配设于共同的旋转轴线cl1上的电动式无级变速部44和机械式有级变速部46等。电动式无级变速部44直接地或经由未图示的阻尼器(damper)等间接地连结于发动机12。机械式有级变速部46连结于电动式无级变速部44的输出侧。在机械式有级变速部46的输出侧连结有分动器30。在自动变速器28中,从发动机12、第二旋转机mg2等输出的动力向机械式有级变速部46传递,并从该机械式有级变速部46向分动器30传递。需要说明的是,以下,将电动式无级变速部44称为无级变速部44,将机械式有级变速部46称为有级变速部46。此外,在不特殊地加以区别的情况下,动力也与转矩、力意义相同。此外,无级变速部44和有级变速部46被配置为相对于旋转轴线cl1大致对称,在图2中相对于该旋转轴线cl1省略下半部分。旋转轴线cl1是发动机12的曲轴、连结于该曲轴的作为自动变速器28的输入旋转构件的连结轴48、作为自动变速器28的输出旋转构件的输出轴50等的轴心。连结轴48也是无级变速部44的输入旋转构件,输出轴50也是有级变速部46的输出旋转构件。
[0051]
无级变速部44具备:第一旋转机mg1;以及作为动力分配机构的差动机构54,将发动机12的动力机械地分配给第一旋转机mg1和作为无级变速部44的输出旋转构件的中间传递构件52。第二旋转机mg2以可传递动力的方式连结于中间传递构件52。无级变速部44是通过控制第一旋转机mg1的运转状态来控制差动机构54的差动状态的电动式无级变速器。无级变速部44作为变速比(也称为齿轮传动比)γ0(=发动机转速ne/mg2转速nm)变化的电动无级变速器而工作。发动机转速ne是发动机12的转速,与无级变速部44的输入转速即连结轴48的转速的值相同。发动机转速ne也是将无级变速部44和有级变速部46合起来的整体的自动变速器28的输入转速。mg2转速nm是第二旋转机mg2的转速,与无级变速部44的输出转速即中间传递构件52的转速的值相同。第一旋转机mg1是能控制发动机转速ne的旋转机。需要说明的是,控制第一旋转机mg1的运转状态是进行第一旋转机mg1的运转控制。
[0052]
差动机构54由单小齿轮型的行星齿轮装置构成,具备太阳轮s0、轮架ca0以及齿圈r0。发动机12经由连结轴48以可传递动力的方式连结于轮架ca0,第一旋转机mg1以可传递动力的方式连结于太阳轮s0,第二旋转机mg2以可传递动力的方式连结于齿圈r0。在差动机构54中,轮架ca0作为输入元件发挥功能,太阳轮s0作为反作用力元件发挥功能,齿圈r0作为输出元件发挥功能。
[0053]
有级变速部46是构成中间传递构件52与分动器30之间的动力传递路径的有级变速器。中间传递构件52也作为有级变速部46的输入旋转构件发挥功能。第二旋转机mg2与中间传递构件52以一体旋转的方式连结。有级变速部46是构成行驶用的驱动力源pu与驱动轮(前轮14、后轮16)之间的动力传递路径的一部分的自动变速器。有级变速部46是例如具备第一行星齿轮装置56和第二行星齿轮装置58这多组行星齿轮装置以及包括单向离合器f1在内的离合器c1、离合器c2、制动器b1、制动器b2这多个接合装置的公知的行星齿轮式的自动变速器。以下,在不特殊加以区别的情况下,将离合器c1、离合器c2、制动器b1以及制动器b2仅称为接合装置cb。
[0054]
接合装置cb是由被液压致动器推压的多板式或单板式的离合器、制动器、被液压致动器拉紧的带式制动器等构成的液压式的摩擦接合装置。在接合装置cb中,通过从四轮驱动车辆10所具备的液压控制回路60(参照图1)输出的被调压后的接合装置cb的各液压分
别对接合、释放等状态即工作状态进行切换。
[0055]
在有级变速部46中,第一行星齿轮装置56和第二行星齿轮装置58的各旋转元件直接地或经由接合装置cb、单向离合器f1间接地一部分相互连结,或者与中间传递构件52、变速箱26或输出轴50连结。第一行星齿轮装置56的各旋转元件是太阳轮s1、轮架ca1、齿圈r1,第二行星齿轮装置58的各旋转元件是太阳轮s2、轮架ca2、齿圈r2。
[0056]
有级变速部46是通过作为多个接合装置中的任一个接合装置的例如规定的接合装置的接合来形成变速比γat(=at输入转速ni/输出转速no)不同的多个变速挡(也称为挡位)中的任一个挡位的有级变速器。就是说,有级变速部46通过多个接合装置中的任一个被接合来切换挡位即执行变速。有级变速部46是形成多个挡位的每一个的有级式的自动变速器。在本实施例中,将由有级变速部46形成的挡位称为at挡位。at输入转速ni是作为有级变速部46的输入旋转构件的转速的有级变速部46的输入转速,与中间传递构件52的转速的值相同,此外,与mg2转速nm的值相同。at输入转速ni可以由mg2转速nm表示。输出转速no是作为有级变速部46的输出转速的输出轴50的转速,也是自动变速器28的输出转速。
[0057]
在有级变速部46中,例如,如图3的接合工作表中所示,作为多个at挡位,形成at1速挡位(图中的“第一挡(1st)”)至at4速挡位(图中的“第四挡(4th)”)的这4挡前进用的at挡位。at1速挡位的变速比γat最大,越是高挡位侧的at挡位,变速比γat越小。此外,后退用的at挡位(图中的“后退挡(rev)”)例如通过离合器c1的接合且制动器b2的接合来形成。就是说,在进行后退行驶时,例如形成at1速挡位。图3的接合工作表是汇总了各at挡位与多个接合装置的各工作状态的关系的表。即,图3的接合工作表是汇总了各at挡位与在各at挡位分别被接合的接合装置即规定的接合装置的关系的表。在图3中,
“○”
表示接合,
“△”
表示在发动机制动时或有级变速部46的滑行降挡(coast downshift)时接合,空栏表示释放。
[0058]
在有级变速部46中,通过后述的电子控制装置130来切换根据驾驶员(driver)的加速操作、车速vv等而形成的at挡位,即选择性地形成多个at挡位。例如,在有级变速部46的变速控制中,通过接合装置cb中的任一个的接合切换来执行变速,即通过接合装置cb的接合与释放的切换来执行变速,执行所谓离合器到离合器(clutch to clutch)变速。
[0059]
四轮驱动车辆10还具备:单向离合器f0、作为机械式的油泵的mop62、未图示的电动式的油泵等。
[0060]
单向离合器f0是能将轮架ca0固定为无法旋转的锁定机构。即,单向离合器f0是能将与发动机12的曲轴连结的、与轮架ca0一体地旋转的连结轴48固定于变速箱26的锁定机构。对于单向离合器f0而言,可相对旋转的两个构件中的一方的构件一体地连结于连结轴48,另一方的构件一体地连结于变速箱26。单向离合器f0对于作为发动机12的运转时的旋转方向的正转方向进行空转,另一方面,对于与发动机12的运转时相反的旋转方向机械地进行自动接合。因此,在单向离合器f0的空转时,发动机12被设为能相对于变速箱26进行相对旋转的状态。另一方面,在单向离合器f0的接合时,发动机12被设为无法相对于变速箱26进行相对旋转的状态。即,通过单向离合器f0的接合,发动机12被固定于变速箱26。如此,单向离合器f0允许作为发动机12的运转时的旋转方向的轮架ca0的正转方向的旋转,并且阻止轮架ca0的反转方向的旋转。即,单向离合器f0是能允许发动机12的正转方向的旋转并且阻止反转方向的旋转的锁定机构。
[0061]
mop62连结于连结轴48,与发动机12的旋转一起旋转并排出在动力传递装置18中
使用的工作油oil。此外,未图示的电动式的油泵例如在发动机12的停止时即mop62的非驱动时被驱动。mop62、未图示的电动式的油泵所排出的工作油oil被供给至液压控制回路60。工作油oil通过液压控制回路60被调压至接合装置cb的各液压,并被供给至动力传递装置18(参照图1)。
[0062]
图4是表示无级变速部44与有级变速部46中的各旋转元件的转速的相对的关系的共线图。在图4中,与构成无级变速部44的差动机构54的三个旋转元件对应的三条纵线y1、y2、y3从左侧起依次是:表示与第二旋转元件re2对应的太阳轮s0的转速的g轴、表示与第一旋转元件re1对应的轮架ca0的转速的e轴、表示与第三旋转元件re3对应的齿圈r0的转速(即有级变速部46的输入转速)的m轴。此外,有级变速部46的四条纵线y4、y5、y6、y7从左起依次是:表示与第四旋转元件re4对应的太阳轮s2的转速的轴、表示与第五旋转元件re5对应的相互连结的齿圈r1和轮架ca2的转速(即输出轴50的转速)的轴、表示与第六旋转元件re6对应的相互连结的轮架ca1和齿圈r2的转速的轴、表示与第七旋转元件re7对应的太阳轮s1的转速的轴。纵线y1、y2、y3的相互的间隔根据差动机构54的齿轮比ρ0来确定。此外,纵线y4、y5、y6、y7的相互的间隔根据第一行星齿轮装置56、第二行星齿轮装置58的各齿轮比ρ1、ρ2来确定。在共线图的纵轴间的关系中,当太阳轮与轮架之间被设为与“1”对应的间隔时,轮架与齿圈之间被设为与行星齿轮装置的齿轮比ρ(=太阳轮的齿数/齿圈的齿数)对应的间隔。
[0063]
如果使用图4的共线图来表现,则在无级变速部44的差动机构54中被配置为:发动机12(参照图中的“eng”)连结于第一旋转元件re1,第一旋转机mg1(参照图中的“mg1”)连结于第二旋转元件re2,第二旋转机mg2(参照图中的“mg2”)连结于与中间传递构件52一体旋转的第三旋转元件re3,将发动机12的旋转经由中间传递构件52向有级变速部46传递。在无级变速部44中,通过横穿纵线y2的各直线l0e、l0m、l0r来表示太阳轮s0的转速与齿圈r0的转速的关系。
[0064]
此外,在有级变速部46中,第四旋转元件re4经由离合器c1选择性地连结于中间传递构件52,第五旋转元件re5连结于输出轴50,第六旋转元件re6经由离合器c2选择性地连结于中间传递构件52并且经由制动器b2选择性地连结于变速箱26,第七旋转元件re7经由制动器b1选择性地连结于变速箱26。在有级变速部46中,根据接合装置cb的接合释放控制,通过横穿纵线y5的各直线l1、l2、l3、l4、lr来表示输出轴50中的“第一挡”、“第二挡”、“第三挡”、“第四挡”、“后退挡”的各转速。
[0065]
由图4中的实线表示的直线l0e以及直线l1、l2、l3、l4示出了能进行至少以发动机12作为驱动力源来行驶的混合动力行驶(=hv行驶)的hv行驶模式下的前进行驶中的各旋转元件的相对速度。在该hv行驶模式下,在差动机构54中,当相对于输入至轮架ca0的正转矩的发动机转矩te,由第一旋转机mg1产生的负转矩即作为反作用力转矩的mg1转矩tg被输入至太阳轮s0时,在齿圈r0出现以正转的形式成为正转矩的发动机直达转矩td(=te/(1 ρ0)=-(1/ρ0)
×
tg)。并且,根据请求驱动力,发动机直达转矩td与mg2转矩tm的合计转矩作为四轮驱动车辆10的前进方向的驱动转矩,经由形成有at1速挡位至at4速挡位中的任一at挡位的有级变速部46向分动器30传递。第一旋转机mg1在以正转的形式产生负转矩的情况下作为发电机发挥功能。第一旋转机mg1的发电电力wg被充电至电池24,或者被第二旋转机mg2消耗。第二旋转机mg2使用发电电力wg的全部或一部分,或者除了发电电力wg之外还使
用来自电池24的电力来输出mg2转矩tm。
[0066]
由图4中的单点划线表示的直线l0m和由图4中的实线表示的直线l1、l2、l3、l4示出了ev行驶模式下的前进行驶中的各旋转元件的相对速度,该ev行驶模式能在使发动机12的运转停止的状态下进行以第一旋转机mg1和第二旋转机mg2中的至少一方的旋转机作为驱动力源来行驶的马达行驶(=ev行驶)。作为ev行驶模式下的前进行驶中的ev行驶,包括例如仅以第二旋转机mg2作为驱动力源进行行驶的单驱动ev行驶和将第一旋转机mg1和第二旋转机mg2一起作为驱动力源进行行驶的双驱动ev行驶。在单驱动ev行驶中,轮架ca0被设为零旋转,对齿圈r0输入以正转的形式成为正转矩的mg2转矩tm。此时,连结于太阳轮s0的第一旋转机mg1被设为无负载状态,以反转的形式进行空转。在单驱动ev行驶中,单向离合器f0被释放,连结轴48未固定于变速箱26。
[0067]
在双驱动ev行驶中,当在轮架ca0被设为零旋转的状态下,对太阳轮s0输入以反转的形式成为负转矩的mg1转矩tg时,单向离合器f0被自动接合,使得轮架ca0向反转方向的旋转被阻止。在轮架ca0通过单向离合器f0的接合被固定为无法旋转的状态下,由mg1转矩tg产生的反作用力转矩被输入至齿圈r0。除此之外,在双驱动ev行驶中,与单驱动ev行驶同样,对齿圈r0输入mg2转矩tm。如果在轮架ca0被设为零旋转的状态下对太阳轮s0输入了以反转的形式成为负转矩的mg1转矩tg时不输入mg2转矩tm,则也能进行由mg1转矩tg实现的单驱动ev行驶。在ev行驶模式下的前进行驶中,发动机12不被驱动,发动机转速ne被设为零,mg1转矩tg和mg2转矩tm中的至少一方的转矩作为四轮驱动车辆10的前进方向的驱动转矩,经由形成有at1速挡位至at4速挡位中的任一at挡位的有级变速部46向分动器30传递。在ev行驶模式下的前进行驶中,mg1转矩tg是反转且负转矩的动力运行转矩,mg2转矩tm是正转且正转矩的动力运行转矩。
[0068]
由图4中的虚线表示的直线l0r和直线lr示出了ev行驶模式下的后退行驶中的各旋转元件的相对速度。在该ev行驶模式下的后退行驶中,对齿圈r0输入以反转的形式成为负转矩的mg2转矩tm,该mg2转矩tm作为四轮驱动车辆10的后退方向的驱动转矩,经由形成有at1速挡位的有级变速部46向分动器30传递。在四轮驱动车辆10中,在通过后述的电子控制装置130形成了多个at挡位中的作为前进用的低挡位侧的at挡位的例如at1速挡位的状态下,使与前进行驶时的前进用的mg2转矩tm正负相反的后退用的mg2转矩tm从第二旋转机mg2输出,由此能进行后退行驶。在ev行驶模式下的后退行驶中,mg2转矩tm是反转且负转矩的动力运行转矩。需要说明的是,在hv行驶模式下,也能如直线l0r那样,将第二旋转机mg2设为反转,因此能与ev行驶模式同样地进行后退行驶。
[0069]
图5是说明分动器30的构造的骨架图。分动器30具备作为非旋转构件的分动箱64。分动器30在分动箱64内以共同的旋转轴线cl1为中心具备后轮侧输出轴66、前轮驱动用驱动齿轮68以及前轮驱动用离合器70。此外,分动器30在分动箱64内以共同的旋转轴线cl2为中心具备前轮侧输出轴72和前轮驱动用从动齿轮74。而且,分动器30具备前轮驱动用空转齿轮76。旋转轴线cl2是前传动轴32、前轮侧输出轴72等的轴心。
[0070]
后轮侧输出轴66以可传递动力的方式连结于输出轴50,并且以可传递动力的方式连结于后传动轴34。后轮侧输出轴66将从驱动力源pu经由自动变速器28传递至输出轴50的驱动力向后轮16输出。需要说明的是,输出轴50也作为向分动器30的后轮侧输出轴66输入来自驱动力源pu的驱动力的分动器30的输入旋转构件发挥功能,就是说也作为向分动器30
传递来自驱动力源pu的驱动力的驱动力传递轴发挥功能。自动变速器28是将来自驱动力源pu的驱动力向输出轴50传递的自动变速器。
[0071]
前轮驱动用驱动齿轮68被设为能相对于后轮侧输出轴66进行相对旋转。前轮驱动用离合器70是多板的湿式离合器,对从后轮侧输出轴66向前轮驱动用驱动齿轮68传递的传递转矩进行调节。即,前轮驱动用离合器70对从后轮侧输出轴66向前轮侧输出轴72传递的传递转矩进行调节。
[0072]
前轮驱动用从动齿轮74一体地设于前轮侧输出轴72,以可传递动力的方式连结于前轮侧输出轴72。前轮驱动用空转齿轮76分别与前轮驱动用驱动齿轮68和前轮驱动用从动齿轮74啮合,以可传递动力的方式连结前轮驱动用驱动齿轮68与前轮驱动用从动齿轮74之间。
[0073]
前轮侧输出轴72经由前轮驱动用空转齿轮76和前轮驱动用从动齿轮74以可传递动力的方式连结于前轮驱动用驱动齿轮68,并且以可传递动力的方式连结于前传动轴32。前轮侧输出轴72将经由前轮驱动用离合器70传递至前轮驱动用驱动齿轮68的来自驱动力源pu的驱动力的一部分向前轮14输出。
[0074]
前轮驱动用离合器70具备离合器毂78、离合器鼓80、摩擦接合元件82以及活塞84。离合器毂78以可传递动力的方式连结于后轮侧输出轴66。离合器鼓80以可传递动力的方式连结于前轮驱动用驱动齿轮68。摩擦接合元件82具有:多张第一摩擦板82a,被设为能相对于离合器毂78在旋转轴线cl1方向进行相对移动并且无法相对于离合器毂78进行相对旋转;以及多张第二摩擦板82b,被设为能相对于离合器鼓80在旋转轴线cl1方向进行相对移动并且无法相对于离合器鼓80进行相对旋转。第一摩擦板82a和第二摩擦板82b被配置成在旋转轴线cl1方向交替地重叠。活塞84被设为能在旋转轴线cl1方向移动,并与摩擦接合元件82抵接来推压第一摩擦板82a和第二摩擦板82b,由此调节前轮驱动用离合器70的转矩容量。需要说明的是,在活塞84不推压摩擦接合元件82的情况下,前轮驱动用离合器70的转矩容量成为零,前轮驱动用离合器70被释放。
[0075]
分动器30通过调节前轮驱动用离合器70的转矩容量来将经由自动变速器28传递的驱动力源pu的驱动力分配给后轮侧输出轴66和前轮侧输出轴72。在前轮驱动用离合器70被释放的情况下,后轮侧输出轴66与前轮驱动用驱动齿轮68之间的动力传递路径被切断,因此分动器30将从驱动力源pu经由自动变速器28传递至分动器30的驱动力经由后传动轴34等向后轮16传递。此外,在前轮驱动用离合器70为滑移接合状态或完全接合状态的情况下,后轮侧输出轴66与前轮驱动用驱动齿轮68之间的动力传递路径被连接,因此分动器30将从驱动力源pu经由分动器30传递的驱动力的一部分经由前传动轴32等传递至前轮14,并且将驱动力的剩余部分经由后传动轴34等传递至后轮16。分动器30是能将来自驱动力源pu的驱动力传递至前轮14和后轮16的驱动力分配装置。
[0076]
分动器30具备电动马达86、蜗轮蜗杆88以及凸轮机构90来作为使前轮驱动用离合器70工作的装置。
[0077]
蜗轮蜗杆88是具备与电动马达86的马达轴一体地形成的蜗杆92和形成有与蜗杆92啮合的齿的蜗轮94的齿轮副。蜗轮94被设为能以旋转轴线cl1为中心进行旋转。当电动马达86旋转时,蜗轮94以旋转轴线cl1为中心进行旋转。
[0078]
凸轮机构90被设在蜗轮94与前轮驱动用离合器70的活塞84之间。凸轮机构90具
备:第一构件96,连接于蜗轮94;第二构件98,连接于活塞84;以及多个滚珠99,夹插于第一构件96与第二构件98之间,凸轮机构90是将电动马达86的旋转运动转换为直线运动的机构。
[0079]
多个滚珠99在以旋转轴线cl1为中心的旋转方向上等角度间隔地配置。在第一构件96和第二构件98的与滚珠99接触的面上分别形成有凸轮槽。各凸轮槽形成为在第一构件96相对于第二构件98进行相对旋转的情况下,第一构件96与第二构件98在旋转轴线cl1方向上相互分离。因此,当第一构件96相对于第二构件98进行相对旋转时,第一构件96与第二构件98相互分离,第二构件98在旋转轴线cl1方向移动,连接于第二构件98的活塞84推压摩擦接合元件82。当通过电动马达86使蜗轮94旋转时,蜗轮94的旋转运动经由凸轮机构90被转换为向旋转轴线cl1方向的直线运动并被传递至活塞84,从而活塞84推压摩擦接合元件82。通过对活塞84推压摩擦接合元件82的推压力进行调节来调节前轮驱动用离合器70的转矩容量。分动器30能通过对前轮驱动用离合器70的转矩容量进行调节来调节作为在前轮14与后轮16之间进行分配的来自驱动力源pu的驱动力的比例的驱动力分配比rx。
[0080]
驱动力分配比rx例如是从驱动力源pu传递至后轮16的驱动力与从驱动力源pu传递至后轮16和前轮14的总驱动力的比例,即后轮侧分配率xr。或者,驱动力分配比rx例如是从驱动力源pu传递至前轮14的驱动力与从驱动力源pu传递至后轮16和前轮14的总驱动力的比例,即前轮侧分配率xf(=1-xr)。在本实施例中,后轮16是主驱动轮,因此作为驱动力分配比rx,使用作为主侧分配率的后轮侧分配率xr。
[0081]
在活塞84不推压摩擦接合元件82的情况下,前轮驱动用离合器70的转矩容量成为零。此时,前轮驱动用离合器70被释放,后轮侧分配率xr成为1.0。换言之,如果将总驱动力设为100,以“前轮14的驱动力∶后轮16的驱动力”来表示向前轮14和后轮16的驱动力的分配即前后轮的驱动力分配,则前后轮的驱动力分配成为0∶100。另一方面,在活塞84推压摩擦接合元件82的情况下,前轮驱动用离合器70的转矩容量变得比零大,前轮驱动用离合器70的转矩容量越增加,后轮侧分配率xr越降低。当前轮驱动用离合器70成为被完全接合的转矩容量时,后轮侧分配率xr成为0.5。换言之,前后轮的驱动力分配以50∶50成为已均衡的状态。如此,分动器30能通过对前轮驱动用离合器70的转矩容量进行调节而在1.0~0.5之间调节后轮侧分配率xr,即在0∶100~50∶50之间调节前后轮的驱动力分配。就是说,分动器30能在将来自驱动力源pu的驱动力仅传递至后轮16的二轮驱动状态与将来自驱动力源pu的驱动力传递至后轮16和前轮14的四轮驱动状态之间进行切换。
[0082]
回到图1,四轮驱动车辆10具备车轮制动装置100。车轮制动装置100具备车轮制动器101、未图示的制动主缸等,对前轮14和后轮16的车轮14、16的每一个赋予由车轮制动器101产生的制动力。车轮制动器101是设于前轮14l、14r的每一个的前制动器101fl、101fr以及设于后轮16l、16r的每一个的后制动器101rl、101rr。车轮制动装置100根据由驾驶员进行的例如制动踏板的踩踏操作等来向分别设于车轮制动器101的未图示的轮缸供给制动液压。在车轮制动装置100中,在通常时,从制动主缸产生的、与制动操作量bra对应的大小的主缸液压作为制动液压被供给向轮缸。另一方面,在车轮制动装置100中,例如在abs(auti
‑
lock brake system:防抱死制动系统)控制时、侧滑抑制控制时、车速控制时等,各控制中所需的制动液压被供给向轮缸用来产生由车轮制动器101产生的制动力。制动操作量bra是表示与制动踏板的踏力对应的、由驾驶员进行的制动踏板的踩踏操作的大小的信号。如此,
车轮制动装置100能调节赋予至车轮14、16的每一个的由车轮制动器101产生的制动力。
[0083]
此外,四轮驱动车辆10具备作为控制器的电子控制装置130,所述电子控制装置130包括对驱动力源pu和分动器30等进行控制的四轮驱动车辆10的控制装置。图1是表示电子控制装置130的输入输出系统的图,并且是说明由电子控制装置130实现的控制功能的主要部分的功能框图。电子控制装置130被配置为包括例如具备cpu、ram、rom、输入输出接口等的所谓微型计算机,cpu利用ram的暂时存储功能并且按照预先存储在rom中的程序进行信号处理,由此执行四轮驱动车辆10的各种控制。电子控制装置130根据需要被配置为包括发动机控制用、变速控制用等的各计算机。
[0084]
向电子控制装置130分别供给基于由四轮驱动车辆10所具备的各种传感器等(例如发动机转速传感器102、输出转速传感器104、mg1转速传感器106、mg2转速传感器108、按各车轮14、16设置的车轮速传感器110、加速器开度传感器112、节气门开度传感器114、制动踏板传感器116、g传感器118、换挡位置传感器120、横摆角速度传感器122、转向传感器124、电池传感器126、油温传感器128等)得到的检测值的各种信号等(例如发动机转速ne、与车速vv对应的输出转速no、作为第一旋转机mg1的转速的mg1转速ng、与at输入转速ni的值相同的mg2转速nm、作为各车轮14、16的转速的车轮速nr、作为表示驾驶员的加速操作的大小的驾驶员的加速操作量的加速器开度θacc、作为电子节气门的开度的节气门开度θth、作为表示用于使车轮制动器101工作的制动踏板正被驾驶员操作的状态的信号的制动接通信号bon、制动操作量bra、四轮驱动车辆10的前后加速度gx和左右加速度gy、四轮驱动车辆10所具备的换挡杆的操作位置possh、作为绕从四轮驱动车辆10的重心穿过的竖直轴的车辆旋转角的变化速度的横摆角速度vyaw、四轮驱动车辆10所具备的方向盘的转向角度θsw和转向方向dsw、电池24的电池温度thbat、电池充放电电流ibat、电池电压vbat、作为工作油oil的温度的工作油温thoil等)。
[0085]
驾驶员的加速操作量是例如作为加速踏板等加速操作构件的操作量的加速操作量,是驾驶员对四轮驱动车辆10的输出请求量。作为驾驶员的输出请求量,除了加速器开度θacc之外,也可以使用节气门开度θth等。
[0086]
从电子控制装置130向四轮驱动车辆10所具备的各装置(例如发动机控制装置20、变换器22、液压控制回路60、电动马达86、车轮制动装置100等)分别输出各种指令信号(例如用于控制发动机12的发动机控制指令信号se、用于分别控制第一旋转机mg1和第二旋转机mg2的旋转机控制指令信号smg、用于控制接合装置cb的工作状态的液压控制指令信号sat、用于控制电动马达86的电动马达控制指令信号sw、用于控制由车轮制动器101产生的制动力的制动控制指令信号sb等)。
[0087]
电子控制装置130为了实现四轮驱动车辆10中的各种控制而具备at变速控制单元即at变速控制部132、混合动力控制单元即混合动力控制部134以及四轮驱动控制单元即四轮驱动控制部136。
[0088]
at变速控制部132使用作为预先通过实验或通过设计求出并存储的关系即预先确定的关系的例如图6所示的at挡位变速映射图来进行有级变速部46的变速判断,并根据需要将用于执行有级变速部46的变速控制的液压控制指令信号sat输出至液压控制回路60。上述at挡位变速映射图例如是在以车速vv和请求驱动力frdem为变量的二维坐标上具有用于判断有级变速部46的变速的变速线的规定的关系。在此,可以使用输出转速no等来代替
车速vv。此外,也可以使用请求驱动转矩trdem、加速器开度θacc、节气门开度θth等来代替请求驱动力frdem。上述at挡位变速映射图中的各变速线是如实线所示的用于判断升挡的升挡线和如虚线所示的用于判断降挡的降挡线。
[0089]
混合动力控制部134包含以下功能,即,作为控制发动机12的工作的发动机控制单元即发动机控制部134a的功能和作为经由变换器22控制第一旋转机mg1和第二旋转机mg2的工作的旋转机控制单元即旋转机控制部134b的功能,并且,混合动力控制部134通过这些控制功能来执行由发动机12、第一旋转机mg1以及第二旋转机mg2实现的混合动力驱动控制等。
[0090]
混合动力控制部134将加速器开度θacc和车速vv应用于作为预先确定的关系的例如驱动请求量映射图,由此计算出作为驱动请求量的请求驱动力frdem。作为所述驱动请求量,除了使用请求驱动力frdem[n]之外,还可以使用各驱动轮(前轮14、后轮16)中的请求驱动转矩trdem[nm]、各驱动轮中的请求驱动功率prdem[w]、输出轴50中的请求at输出转矩等。混合动力控制部134考虑电池24的可充电电力win、可放电电力wout等,输出作为控制发动机12的指令信号的发动机控制指令信号se和作为控制第一旋转机mg1和第二旋转机mg2的指令信号的旋转机控制指令信号smg,以便实现基于请求驱动转矩trdem和车速vv的请求驱动功率prdem。发动机控制指令信号se例如是输出此时的发动机转速ne下的发动机转矩te的发动机12的功率即发动机功率pe的指令值。旋转机控制指令信号smg例如是输出作为发动机转矩te的反作用力转矩的指令输出时的mg1转速ng下的mg1转矩tg的第一旋转机mg1的发电电力wg的指令值,并且是输出指令输出时的mg2转速nm下的mg2转矩tm的第二旋转机mg2的消耗电力wm的指令值。
[0091]
电池24的可充电电力win是对电池24的输入电力的限制进行规定的可输入的最大电力,表示电池24的输入限制。电池24的可放电电力wout是对电池24的输出电力的限制进行规定的可输出的最大电力,表示电池24的输出限制。电池24的可充电电力win、可放电电力wout例如由电子控制装置130基于电池温度thbat和电池24的充电状态值soc[%]来计算。电池24的充电状态值soc是表示与电池24的充电量相当的充电状态的值,例如由电子控制装置130基于电池充放电电流ibat和电池电压vbat等来计算。
[0092]
例如在使无级变速部44作为无级变速器工作而使自动变速器28整体作为无级变速器工作的情况下,混合动力控制部134考虑最佳发动机动作点等,以成为得到实现请求驱动功率prdem的发动机功率pe的发动机转速ne、发动机转矩te的方式控制发动机12并且控制第一旋转机mg1的发电电力wg,由此执行无级变速部44的无级变速控制而使无级变速部44的变速比γ0变化。作为该控制的结果,作为无级变速器工作的情况下的自动变速器28的变速比γt(=γ0
×
γat=ne/no)被控制。最佳发动机动作点被预先确定为例如在实现请求发动机功率pedem时,除了发动机12单体的燃料效率还考虑了电池24的充放电效率等的四轮驱动车辆10的总燃料效率成为最佳的发动机动作点。该发动机动作点是由发动机转速ne和发动机转矩te表示的发动机12的运转点。最佳发动机动作点的发动机转速ne是四轮驱动车辆10中的能量效率成为最优的最佳发动机转速neb。
[0093]
例如在使无级变速部44像有级变速器那样变速而使自动变速器28整体像有级变速器那样变速的情况下,混合动力控制部134使用作为预先确定的关系的例如有级变速映射图来进行自动变速器28的变速判断,与由at变速控制部132进行的有级变速部46的at挡
位的变速控制合作,以使变速比γt不同的多个挡位选择性地成立的方式,执行无级变速部44的变速控制。能通过由第一旋转机mg1根据输出转速no控制发动机转速ne来使多个挡位以能维持各自的变速比γt的方式成立。
[0094]
混合动力控制部134根据行驶状态使ev行驶模式或hv行驶模式选择性地成立来作为行驶模式。例如,混合动力控制部134在处于请求驱动功率prdem小于预先确定的阈值的ev行驶区域的情况下,使ev行驶模式成立,另一方面,在处于请求驱动功率prdem成为预先确定的阈值以上的hv行驶区域的情况下,使hv行驶模式成立。图6的单点划线a是用于在hv行驶模式与ev行驶模式之间进行切换的hv行驶区域与ev行驶区域的边界线。具有如该图6的单点划线a所示的边界线的预先确定的关系是在以车速vv和请求驱动力frdem为变量的二维坐标中构成的行驶模式切换映射图的一个例子。需要说明的是,在图6中,为了方便,将该行驶模式切换映射图与at挡位变速映射图一起示出。
[0095]
在使ev行驶模式成立时仅利用第二旋转机mg2就能实现请求驱动功率prdem的情况下,混合动力控制部134使四轮驱动车辆10以基于第二旋转机mg2的单驱动ev行驶的方式行驶。另一方面,在使ev行驶模式成立时仅利用第二旋转机mg2无法实现请求驱动功率prdem的情况下,混合动力控制部134使四轮驱动车辆10以双驱动ev行驶的方式行驶。即使在仅利用第二旋转机mg2就能实现请求驱动功率prdem时,在并用第一旋转机mg1和第二旋转机mg2比仅用第二旋转机mg2效率更好的情况下,混合动力控制部134也可以使四轮驱动车辆10以双驱动ev行驶的方式行驶。
[0096]
即使在请求驱动功率prdem处于ev行驶区域时,在电池24的充电状态值soc小于预先确定的发动机起动阈值的情况下,或者在需要发动机12的预热的情况下等等,混合动力控制部134也使hv行驶模式成立。所述发动机起动阈值是用于判断需要自动地起动发动机12来对电池24进行充电的充电状态值soc的预先确定的阈值。
[0097]
混合动力控制部134功能性地具备在规定的起动条件rmst成立时进行使发动机12自动起动的自动起动控制ctst的起动控制单元即起动控制部134c。规定的起动条件rmst是例如在使发动机12的运转停止时使hv行驶模式成立的情况、从公知的怠速停止控制复位的情况等,该怠速停止控制是在发动机12在hv行驶模式下运转时四轮驱动车辆10停止,由此暂时地停止发动机12的控制。起动控制部134c判定规定的起动条件rmst是否成立,在判定为规定的起动条件rmst成立的情况下,判定为有发动机12的起动请求。起动控制部134c在判定为有发动机12的起动请求的情况下,进行自动起动控制ctst。
[0098]
起动控制部134c在进行自动起动控制ctst时,例如通过第一旋转机mg1使发动机转速ne上升,并且在发动机转速ne成为规定可点火转速neigf以上时进行向发动机12的燃料供给、发动机12的点火,由此使发动机12自行旋转。规定可点火转速neigf是例如发动机12能在初爆后自行旋转并且完爆的预先确定的发动机转速ne。起动控制部134c在发动机12完爆且燃烧稳定后,将发动机转速ne控制为作为发动机转速ne的目标值的目标发动机转速netgt,从而完成一系列的自动起动控制ctst。自动起动控制ctst中的发动机12的完爆后的目标发动机转速netgt是例如最佳发动机转速neb、怠速停止转速neidl等预先确定的规定起动时发动机转速nestf。在本实施例中,将自动起动控制ctst中的发动机12的完爆后的目标发动机转速netgt称为起动时目标发动机转速nesttgt。
[0099]
混合动力控制部134功能性地具备在规定的停止条件rmsp成立时进行使发动机12
自动停止的自动停止控制ctsp的停止控制单元即停止控制部134d。规定的停止条件rmsp是例如在使发动机12运转时使ev行驶模式成立的情况、在发动机12在hv行驶模式下运转时四轮驱动车辆10停止由此实施怠速停止控制的情况等。停止控制部134d判定规定的停止条件rmsp是否成立,在判定为规定的停止条件rmsp成立的情况下,判定为有发动机12的停止请求。停止控制部134d在判定为有发动机12的停止请求的情况下,进行自动停止控制ctsp。
[0100]
停止控制部134d在进行自动停止控制ctsp时,停止向发动机12的燃料供给。此时,停止控制部134d可以例如以将使发动机转速ne降低的转矩赋予至发动机12的方式来控制mg1转矩tg,从而使发动机转速ne迅速降低而使发动机12停止旋转。
[0101]
四轮驱动控制部136进行调节后轮侧分配率xr的驱动力分配控制ctx。四轮驱动控制部136设定与从输出转速传感器104、g传感器118等判断出的四轮驱动车辆10的行驶状态相应的后轮侧分配率xr的目标值,以通过调节前轮驱动用离合器70的转矩容量来将后轮侧分配率xr调节为目标值的方式,输出用于控制电动马达86的电动马达控制指令信号sw。
[0102]
四轮驱动控制部136例如在直行行驶时释放前轮驱动用离合器70,由此将后轮侧分配率xr控制为1.0(即,将前后轮的驱动力分配控制为0∶100)。此外,四轮驱动控制部136基于转弯行驶中的转向角度θsw和车速vv等计算目标横摆角速度vyawtgt,以由横摆角速度传感器122随时检测出的横摆角速度vyaw追随目标横摆角速度vyawtgt的方式调节后轮侧分配率xr。
[0103]
再者,动力传递装置18具有基于例如质量m、扭转刚性k等预先确定的共振转速nx。另一方面,在四轮驱动车辆10中,后轮侧分配率xr在1.0~0.5之间被调节,即前后轮的驱动力分配在0∶100~50∶50之间被调节。就是说,在四轮驱动车辆10中,动力传递装置18中的发动机12以可传递动力的方式连接的动力传递路径即驱动系统根据后轮侧分配率xr而变化。因此,在四轮驱动车辆10中,驱动系统的质量m、扭转刚性k根据后轮侧分配率xr而变化,根据后轮侧分配率xr使驱动系统的共振转速nx变化。这样一来,在四轮驱动车辆10中,在进行自动起动控制ctst时,产生因发动机12的转矩变动而导致的驱动系统的共振,驱动系统的振动容易变大,从而nv恐怕会容易恶化。在自动起动控制ctst中,与在处于上升过程的发动机转速ne通过驱动系统的共振转速nx时产生的驱动系统的共振相比,在起动时目标发动机转速nesttgt被维持在驱动系统的共振转速nx、共振转速nx附近时产生的驱动系统的共振更容易成为问题。在本实施例中,作为驱动系统的共振成为问题的发动机12的转矩变动的频率,举出起动时目标发动机转速nesttgt。需要说明的是,驱动系统的共振转速nx是指产生驱动系统的共振的驱动系统的转速的值,其中,该驱动系统的转速是指例如,相当于连结轴48的转速和发动机转速ne的动力传递装置18的输入转速。此外,在该驱动系统的转速始终与发动机转速ne大致相等的方案中,可以解释为驱动系统的共振转速nx也是发动机12的共振转速nx,即产生驱动系统的共振的发动机转速ne的值。
[0104]
因此,起动控制部134c在进行自动起动控制ctst时,基于后轮侧分配率xr来相对于规定起动时发动机转速nestf变更起动时目标发动机转速nesttgt。起动控制部134c将起动时目标发动机转速nesttgt设定为与驱动系统的共振转速nx分离的转速。
[0105]
电子控制装置130为了实现能在进行自动起动控制ctst时抑制或防止由于驱动系统的振动变大而导致的nv的恶化的四轮驱动车辆10,还具备车辆状态获取单元即车辆状态获取部138。
[0106]
在通过起动控制部134c判定为有发动机12的起动请求时,车辆状态获取部138获取计算驱动系统的固有振动频率f时所需的环境信息。例如,车辆状态获取部138获取后轮侧分配率xr来作为表示通过四轮驱动控制部136实现的驱动力分配控制ctx的状态的值。固有振动频率与共振频率意义相同。
[0107]
车辆状态获取部138例如通过将后轮侧分配率xr应用于驱动系统质量映射图mapm来计算驱动系统的质量m。此外,车辆状态获取部138例如通过将后轮侧分配率xr应用于驱动系统扭转刚性映射图mapk来计算驱动系统的扭转刚性k。驱动系统质量映射图mapm是后轮侧分配率xr与驱动系统的质量m的预先确定的关系。驱动系统扭转刚性映射图mapk是后轮侧分配率xr与驱动系统的扭转刚性k的预先确定的关系。
[0108]
车辆状态获取部138使用与后轮侧分配率xr相应的驱动系统的质量m和扭转刚性k来计算驱动系统的固有振动频率f。在计算该驱动系统的固有振动频率f时使用的计算式是例如在后述的图7的流程图中的步骤s30中示出的算式(1)。驱动系统的固有振动频率f对应于驱动系统的共振转速nx。就是说,车辆状态获取部138基于后轮侧分配率xr来计算驱动系统的共振转速nx。
[0109]
起动控制部134c在进行自动起动控制ctst时,将起动时目标发动机转速nesttgt设定为以规定值δnest的量与由车辆状态获取部138计算出的驱动系统的共振转速nx分离的转速。起动时目标发动机转速nesttgt可以被设定为比驱动系统的共振转速nx高的转速,也可以被设定为比驱动系统的共振转速nx低的转速。规定值δnest是例如用于设定起动时目标发动机转速nesttgt的预先确定的值,该起动时目标发动机转速nesttgt能抑制从规定起动时发动机转速nestf起的变更量,并且能避免或抑制驱动系统的共振的产生。
[0110]
在此,考虑驱动力分配控制ctx成为故障状态的情况。驱动力分配控制ctx的故障状态是例如未向电动马达86正常供给电动马达控制指令信号sw就是说驱动电流的状态等。在这种情况下,电动马达86成为自由旋转的状态,因此活塞84被设为不推压摩擦接合元件82的状态而前轮驱动用离合器70的转矩容量成为零。就是说,在驱动力分配控制ctx的故障状态下,前轮驱动用离合器70被释放,四轮驱动车辆10成为后轮侧分配率xr为1.0的二轮驱动状态。在通过起动控制部134c判定为有发动机12的起动请求时,车辆状态获取部138在驱动力分配控制ctx为故障状态的情况下,将驱动系统的固有振动频率f设为四轮驱动车辆10为二轮驱动状态时的规定的固有振动频率f,即后轮侧分配率xr为1.0时的规定的固有振动频率f。
[0111]
图7是说明电子控制装置130的控制工作的主要部分的流程图,是说明用于实现能在进行自动起动控制ctst时抑制或防止由于驱动系统的振动变大而导致的nv的恶化的四轮驱动车辆10的控制工作的流程图,该流程图例如在有发动机12的起动请求时被执行。
[0112]
在图7中,首先,在与车辆状态获取部138的功能对应的步骤(以下,省略步骤)s10中,获取环境信息。具体而言,获取后轮侧分配率xr来作为表示驱动力分配控制ctx的状态的值。接着,在与车辆状态获取部138的功能对应的s20中,基于后轮侧分配率xr来计算驱动系统的质量m和扭转刚性k。接着,在与车辆状态获取部138的功能对应的s30中,使用图中的算式(1),基于驱动系统的质量m和扭转刚性k来计算驱动系统的固有振动频率f,就是说计算驱动系统的共振转速nx。接着,在与起动控制部134c的功能对应的s40中,将起动时目标发动机转速nesttgt设定为与驱动系统的共振转速nx分离的转速,并进行自动起动控制
ctst。在自动起动控制ctst中,在发动机转速ne成为规定可点火转速neigf以上时进行向发动机12的燃料供给、发动机12的点火,在发动机12初爆后自行旋转,并且在完爆且燃烧稳定后,将发动机转速ne控制为起动时目标发动机转速nesttgt。
[0113]
如上所示,根据本实施例,基于后轮侧分配率xr来相对于规定起动时发动机转速nestf变更起动时目标发动机转速nesttgt,起动时目标发动机转速nesttgt被设定为与驱动系统的共振转速nx分离的转速,因此会在进行自动起动控制ctst时抑制或避免因发动机12的转矩变动而导致的驱动系统的共振的产生。由此,能在进行自动起动控制ctst时抑制或防止由于驱动系统的振动变大而导致的nv的恶化。
[0114]
此外,根据本实施例,起动时目标发动机转速nesttgt被设定为以规定值δnest的量与基于后轮侧分配率xr计算出的驱动系统的共振转速nx分离的转速,因此会适当地抑制或避免因发动机12的转矩变动而导致的驱动系统的共振的产生。此外,规定值δnest是用于设定起动时目标发动机转速nesttgt的预先确定的值,该起动时目标发动机转速nesttgt能抑制从规定起动时发动机转速nestf起的变更量,并且能避免或抑制驱动系统的共振的产生,因此在进行自动起动控制ctst时设为从规定起动时发动机转速nestf起的变更量被抑制的起动时目标发动机转速nesttgt,并且会适当地抑制或避免驱动系统的共振的产生。
[0115]
此外,根据本实施例,规定起动时发动机转速nestf是最佳发动机转速neb,因此相对于最佳发动机转速neb变更起动时目标发动机转速nesttgt,由此将起动时目标发动机转速nesttgt与驱动系统的共振转速nx分离。由此,能抑制能量效率的恶化,并且能抑制或防止nv的恶化。此外,如果起动时目标发动机转速nesttgt被设定为以规定值δnest的量与驱动系统的共振转速nx分离的转速,则设为从最佳发动机转速neb起的变更量被抑制的起动时目标发动机转速nesttgt,因此会适当地抑制能量效率的恶化。
[0116]
接着,对本发明的其他实施例进行说明。需要说明的是,在以下的说明中,对于实施例彼此共同的部分标注相同的附图标记,并省略说明。
[0117]
[实施例2]
[0118]
在前述的实施例1中,通过变更起动时目标发动机转速nesttgt,将起动时目标发动机转速nesttgt与驱动系统的共振转速nx分离。除了这种控制功能之外,也能通过变更驱动系统的共振转速nx而将起动时目标发动机转速nesttgt与驱动系统的共振转速nx分离。
[0119]
在通过起动控制部134c进行自动起动控制ctst时,四轮驱动控制部136以使驱动系统的共振转速nx与规定起动时发动机转速nestf分离的方式相对于未进行自动起动控制ctst时的后轮侧分配率xr变更后轮侧分配率xr。
[0120]
电子控制装置130除了具有变更起动时目标发动机转速nesttgt的控制功能之外,还具有以使驱动系统的共振转速nx与规定起动时发动机转速nestf分离的方式相对于未进行自动起动控制ctst时的后轮侧分配率xr变更进行自动起动控制ctst时的后轮侧分配率xr的控制功能。电子控制装置130在进行自动起动控制ctst时,基于车辆状态择一地进行起动时目标发动机转速nesttgt的变更和后轮侧分配率xr的变更,并将起动时目标发动机转速nesttgt与驱动系统的共振转速nx分离。
[0121]
在如急起步操作、急加速操作等这样驾驶员的加速操作大时,优选的是抑制对车辆运动可控性的影响,因此与能量效率的提高相比,使通过驱动力分配控制ctx实现的车辆运动可控性优先。如图8所示,在作为表示车辆状态的一个参数的加速器开度θacc为规定量
θaccf以上时,电子控制装置130使驱动力分配控制ctx优先,通过起动时目标发动机转速nesttgt的变更来将起动时目标发动机转速nesttgt与驱动系统的共振转速nx分离。另一方面,如图8所示,在加速器开度θacc小于规定量θaccf时,电子控制装置130使规定起动时发动机转速nestf下的自动起动控制ctst优先,通过后轮侧分配率xr的变更来将起动时目标发动机转速nesttgt与驱动系统的共振转速nx分离。规定量θaccf是例如用于在进行自动起动控制ctst时在抑制或防止nv的恶化的基础上抑制对车辆运动可控性的影响,并且抑制相对于规定起动时发动机转速nestf变更起动时目标发动机转速nesttgt的预先确定的阈值。
[0122]
或者,在驾驶员的转向操作大时,优选的是抑制对车辆运动可控性的影响,因此与能量效率的提高相比,使通过驱动力分配控制ctx实现的车辆运动可控性优先。电子控制装置130如图9所示在作为表示车辆状态的一个参数的横摆角速度vyaw为规定角速度vyawf以上时和/或如图10所示在作为表示车辆状态的一个参数的转向角度θsw为规定角度θswf以上时,使驱动力分配控制ctx优先,通过起动时目标发动机转速nesttgt的变更来将起动时目标发动机转速nesttgt与驱动系统的共振转速nx分离。另一方面,电子控制装置130如图9所示在横摆角速度vyaw小于规定角速度vyawf时和/或如图10所示在转向角度θsw小于规定角度θswf时,使规定起动时发动机转速nestf下的自动起动控制ctst优先,通过后轮侧分配率xr的变更来将起动时目标发动机转速nesttgt与驱动系统的共振转速nx分离。规定角速度vyawf、规定角度θswf是例如用于在进行自动起动控制ctst时在抑制或防止nv的恶化的基础上抑制对车辆运动可控性的影响,并且抑制相对于规定起动时发动机转速nestf变更起动时目标发动机转速nesttgt的预先确定的阈值。
[0123]
或者,在驾驶员进行了转向操作这样的状况时,优选的是抑制对车辆运动可控性的影响,因此与能量效率的提高相比,使通过驱动力分配控制ctx实现的车辆运动可控性优先。如图11所示,在作为表示车辆状态的一个参数的四轮驱动车辆10为转弯行驶中时,电子控制装置130使驱动力分配控制ctx优先,通过起动时目标发动机转速nesttgt的变更来将起动时目标发动机转速nesttgt与驱动系统的共振转速nx分离。另一方面,如图11所示,在作为表示车辆状态的一个参数的四轮驱动车辆10为直行行驶中时,电子控制装置130使规定起动时发动机转速nestf下的自动起动控制ctst优先,通过后轮侧分配率xr的变更来将起动时目标发动机转速nesttgt与驱动系统的共振转速nx分离。基于四轮驱动车辆10是在转弯行驶中还是在直行行驶中择一地进行起动时目标发动机转速的变更和后轮侧分配率的变更的方案也能视为例如在图9所示的方案中,规定角速度vyawf被设定为零或零附近的值这样的方案,或者在图10所示的方案中规定角度θswf被设定为零或零附近的值这样的方案。
[0124]
对于图8、图9、图10、图11所示的各方案,实施至少一个方案即可。
[0125]
如上所述,根据本实施例,在进行自动起动控制ctst时,基于车辆状态择一地进行起动时目标发动机转速nesttgt的变更和后轮侧分配率xr的变更,而将起动时目标发动机转速nesttgt与驱动系统的共振转速nx分离,因此会在抑制或防止nv的恶化的基础上,抑制对车辆运动可控性的影响,并且抑制起动时目标发动机转速nesttgt相对于规定起动时发动机转速nestf被变更。如果规定起动时发动机转速nestf是最佳发动机转速neb,则会抑制能量效率的恶化。
[0126]
此外,根据本实施例,在加速器开度θacc为规定量θaccf以上时,通过起动时目标
发动机转速nesttgt的变更来将起动时目标发动机转速nesttgt与驱动系统的共振转速nx分离,因此在进行了急起步操作、急加速操作这样的状况下,与能量效率的提高相比,使通过驱动力分配控制ctx实现的车辆运动可控性优先。另一方面,在加速器开度θacc小于规定量θaccf时,通过后轮侧分配率xr的变更来将起动时目标发动机转速nesttgt与驱动系统的共振转速nx分离,因此在起步操作、加速操作缓慢这样的状况下,与通过驱动力分配控制ctx实现的车辆运动可控性相比,使能量效率的提高优先。由此,会在抑制或防止nv的恶化的基础上,抑制对车辆运动可控性的影响,并且抑制起动时目标发动机转速nesttgt相对于规定起动时发动机转速nestf被变更。如果规定起动时发动机转速nestf是最佳发动机转速neb,则会抑制能量效率的恶化。
[0127]
此外,根据本实施例,在横摆角速度vyaw为规定角速度vyawf以上时或转向角度θsw为规定角度θswf以上时或四轮驱动车辆10为转弯行驶中时,通过起动时目标发动机转速nesttgt的变更来将起动时目标发动机转速nesttgt与驱动系统的共振转速nx分离,因此在车辆姿势的变化大这样的状况下,与能量效率的提高相比,使通过驱动力分配控制ctx实现的车辆运动可控性优先。另一方面,在横摆角速度vyaw小于规定角速度vyawf时或转向角度θsw小于规定角度θswf时或四轮驱动车辆10为直行行驶中时,通过后轮侧分配率xr的变更来将起动时目标发动机转速nesttgt与驱动系统的共振转速nx分离,因此在车辆姿势的变化小这样的状况下,与通过驱动力分配控制ctx实现的车辆运动可控性相比,使能量效率的提高优先。由此,会在抑制或防止nv的恶化的基础上,抑制对车辆运动可控性的影响,并且抑制起动时目标发动机转速nesttgt相对于规定起动时发动机转速nestf被变更。如果规定起动时发动机转速nestf是最佳发动机转速neb,则会抑制能量效率的恶化。
[0128]
以上,基于附图对本发明的实施例进行了详细说明,但本发明也适用于其他方案。
[0129]
例如,在前述的实施例1中,举例示出了后轮侧分配率xr来作为表示驱动力分配控制ctx的状态的值,通过将后轮侧分配率xr应用于驱动系统质量映射图mapm、驱动系统扭转刚性映射图mapk来计算出驱动系统的质量m、扭转刚性k,但不限于此方案。例如,表示驱动力分配控制ctx的状态的值也可以是活塞84抵接于摩擦接合元件82来推压第一摩擦板82a和第二摩擦板82b时的按压力、针对电动马达86的电动马达控制指令信号sw等。此外,还可以使用将表示驱动力分配控制ctx的状态的值设为输入参数的预先确定的函数来分别计算驱动系统的质量m、扭转刚性k。
[0130]
此外,在前述的实施例2中,基于加速器开度θacc是否为规定量θaccf以上来择一地进行起动时目标发动机转速nesttgt的变更和后轮侧分配率xr的变更,但不限于此方案。例如,也可以代替加速器开度θacc等加速操作量而基于请求驱动力frdem等驱动请求量是否为规定量以上来择一地进行起动时目标发动机转速nesttgt的变更和后轮侧分配率xr的变更。所述驱动请求量是基于加速器开度θacc等计算出的值,但例如在自动驾驶控制、自动车速控制等中,有时也使用不依赖于由驾驶员实现的加速操作量的驱动请求量。所述驱动请求量对例如具有自动驾驶控制、自动车速控制等控制功能的四轮驱动车辆是有用的。
[0131]
此外,在前述的实施例中,四轮驱动车辆10是以fr方式的车辆为基础的四轮驱动车辆,或者是根据行驶状态在二轮驱动与四轮驱动之间进行切换的分时式的四轮驱动车辆,或者是将发动机12、第一旋转机mg1以及第二旋转机mg2作为驱动力源的混合动力车辆,或者是具备串联地具有无级变速部44和有级变速部46的自动变速器28的四轮驱动车辆,但
不限于此方案。例如,即使是以ff(前置发动机/前轮驱动)方式的车辆为基础的四轮驱动车辆,或者全时式的四轮驱动车辆,或者来自发动机和旋转机的驱动力被传递向驱动轮的并联式的混合动力车辆,或者仅将发动机作为驱动力源的车辆等,也可以应用本发明。或者,即使是具备公知的行星齿轮式自动变速器、包括公知的dct(dual clutch transmission:双离合器变速器)的同步啮合型平行二轴式自动变速器、公知的带式无级变速器或者公知的电动式无级变速器等来作为自动变速器的四轮驱动车辆,也可以应用本发明。需要说明的是,在以ff方式的车辆为基础的四轮驱动车辆的情况下,前轮成为主驱动轮,后轮成为副驱动轮,前轮侧分配率xf成为主侧分配率。在具备具有差动限制离合器的中央差动齿轮装置(中心差速器)的全时式的四轮驱动车辆的情况下,在限制中心差速器的差动的差动限制离合器不工作时,例如前后轮的驱动力分配被设为30∶70等规定的驱动力分配,差动限制离合器工作,由此前后轮的驱动力分配被变更为50∶50。总之,只要是具备至少包括发动机的驱动力源、能将来自所述驱动力源的驱动力传递至主驱动轮和副驱动轮并且能对驱动力分配比进行调节的驱动力分配装置以及进行驱动力分配控制并且进行自动起动控制的控制装置的四轮驱动车辆,就可以应用本发明。
[0132]
此外,在上述的实施例中,构成分动器30的前轮驱动用离合器70的活塞84被配置为当电动马达86旋转时,经由凸轮机构90向摩擦接合元件82侧移动来推压摩擦接合元件82,但并不限于此方案。例如,也可以被配置为当电动马达86旋转时,活塞84经由将旋转运动转换为直线运动的滚珠丝杠等来推压摩擦接合元件82。或者,活塞84也可以由液压致动器驱动。
[0133]
需要说明的是,上述的方案仅是一个实施方式,本发明能以基于本领域技术人员的知识施加各种变更、改良之后的方案来实施。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。