1.本发明涉及无人机技术领域,具体是指一种带有机械爪的无人机。
背景技术:
2.无人机是通过无线电遥控设备或机载计算机程控系统进行操控的不载人飞行器,无人机结构简单,使用成本低,不但能完成有人驾驶飞机执行的任务,更适用于有人飞机不宜执行的任务,在突发事情应急,预警有很大的作用,无人驾驶飞机简称无人机,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。
3.随着科技技术的发展,无人机被用到的地方越来越多,许多小型无人机被用于航拍中,但是现有无人机大多不具有抓取功能,在补给携带物品上升时不方便,降低了无人机的实用性。
技术实现要素:
4.本发明要解决的技术问题是克服以上技术缺陷,提供一种结构简单,易于实现,方便操控,可以提供稳定的抓取载物功能的一种带有机械爪的无人机。
5.为解决上述技术问题,本发明提供的技术方案为:一种带有机械爪的无人机,包括无人机本体,所述无人机本体底部周边连接设有吊接柱,所述吊接柱端部相对连接设有铰接板,所述铰接板端部铰接设有夹爪,所述无人机本体底部居中连接设有电动推杆,所述电动推杆的动力输出端连接设有推板,所述推板与夹爪上部滑动连接。
6.进一步的,所述夹爪包括铰接头,所述铰接头上部连接设有定位板,所述铰接头下部连接设有夹持件。
7.进一步的,所述定位板上设有滑槽,所述滑槽内连接设有滑块,所述滑块的另一端与推板连接。
8.进一步的,所述滑块初始状态设于滑槽顶部,此时夹持件为闭合状态;所述滑块移动至滑槽底部时,夹持件为完全张开状态。
9.进一步的,所述夹持件呈向外凸起的弧形结构,所述夹持件底部设有向内翻折的挂钩。
10.本发明与现有技术相比的优点在于:
11.利用吊接柱和铰接板提供支撑作用,利用夹爪和推板的配合,在电动推杆的动力作用下实现抓取功能,结构简单,方便操控,为无人机增加稳定的抓取载物功能。
附图说明
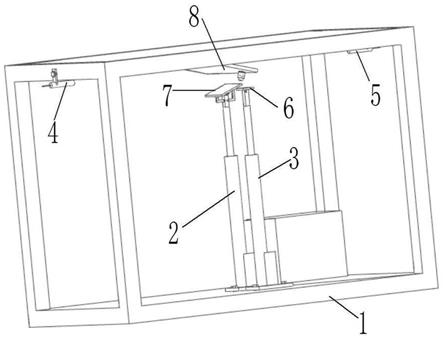
12.图1为一种带有机械爪的无人机结构示意图。
13.附图中:1、无人机本体,2、吊接柱,3、铰接板,4、夹爪,5、电动推杆,6、推板,7、铰接头,8、定位板,9、夹持件,10、滑槽,11、滑块,12、挂钩。
具体实施方式
14.下面结合附图对本发明做进一步的详细说明。
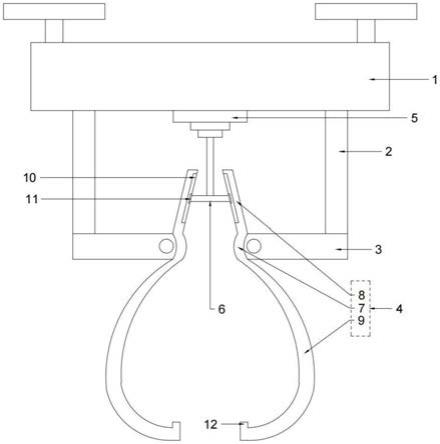
15.结合图1所示,一种带有机械爪的无人机,包括无人机本体1,所述无人机本体1底部周边连接设有吊接柱2,所述吊接柱2端部相对连接设有铰接板3,所述铰接板3端部铰接设有夹爪4,所述无人机本体1底部居中连接设有电动推杆5,所述电动推杆5的动力输出端连接设有推板6,所述推板6与夹爪4上部滑动连接。
16.所述夹爪4包括铰接头7,所述铰接头7上部连接设有定位板8,所述铰接头7下部连接设有夹持件9,铰接头7作为支点作用,利用铰接头7与铰接板3的铰接作用,在推板6的助力作用下,控制定位板8之间间距的开合,从而控制夹持件9之间距离的开合,从而实现抓取功能,所述定位板8上设有滑槽10,所述滑槽10内连接设有滑块11,所述滑块11的另一端与推板6连接,利用滑块11与滑槽10的滑动配合关系,可以方便的通过推板6进行推进,所述滑块11初始状态设于滑槽10顶部,此时夹持件9为闭合状态;所述滑块11移动至滑槽10底部时,夹持件9为完全张开状态,使用操作方便,利用推板6推进滑块11移动即可直接的控制夹持件9开合,所述夹持件9呈向外凸起的弧形结构,所述夹持件9底部设有向内翻折的挂钩12,可以提供钩挂效果,提供更稳定的运载功能。
17.本发明在具体实施时:通过对电动推杆5的控制,操控推板6的移动,然后控制滑块11在滑槽10内的位置,然后利用铰接头7杠杆支点作用进行张开和闭合夹持件9,完成对物料的抓取作用。
18.以上对本发明及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。总而言之,如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
技术特征:
1.一种带有机械爪的无人机,包括无人机本体(1),其特征在于:所述无人机本体(1)底部周边连接设有吊接柱(2),所述吊接柱(2)端部相对连接设有铰接板(3),所述铰接板(3)端部铰接设有夹爪(4),所述无人机本体(1)底部居中连接设有电动推杆(5),所述电动推杆(5)的动力输出端连接设有推板(6),所述推板(6)与夹爪(4)上部滑动连接。2.根据权利要求1所述的一种带有机械爪的无人机,其特征在于:所述夹爪(4)包括铰接头(7),所述铰接头(7)上部连接设有定位板(8),所述铰接头(7)下部连接设有夹持件(9)。3.根据权利要求2所述的一种带有机械爪的无人机,其特征在于:所述定位板(8)上设有滑槽(10),所述滑槽(10)内连接设有滑块(11),所述滑块(11)的另一端与推板(6)连接。4.根据权利要求3所述的一种带有机械爪的无人机,其特征在于:所述滑块(11)初始状态设于滑槽(10)顶部,此时夹持件(9)为闭合状态;所述滑块(11)移动至滑槽(10)底部时,夹持件(9)为完全张开状态。5.根据权利要求2所述的一种带有机械爪的无人机,其特征在于:所述夹持件(9)呈向外凸起的弧形结构,所述夹持件(9)底部设有向内翻折的挂钩(12)。
技术总结
本发明公开了一种带有机械爪的无人机,包括无人机本体(1),所述无人机本体(1)底部周边连接设有吊接柱(2),所述吊接柱(2)端部相对连接设有铰接板(3),所述铰接板(3)端部铰接设有夹爪(4),所述无人机本体(1)底部居中连接设有电动推杆(5),所述电动推杆(5)的动力输出端连接设有推板(6),所述推板(6)与夹爪(4)上部滑动连接。本发明与现有技术相比的优点在于:结构简单,易于实现,方便操控,可以提供稳定的抓取载物功能。取载物功能。取载物功能。
技术研发人员:赵靖 赖家柳 韦保芬 韦桂柯 陆思羽 林渝杰 李丰
受保护的技术使用者:桂林航天工业学院
技术研发日:2021.08.04
技术公布日:2021/11/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。