1.本发明涉及电动车领域,具体为一种应用于自动驾驶的电控式制动驻车一体系统。
背景技术:
2.随着汽车产业的发展,自动驾驶对制动的安全和快速越来越重视,集成化和小型化的制动结构也在不断改进,现有的汽车,尤其是电动汽车大多采用的都是传统的机械式系统,结构复杂,安装时对空间布局有要求。在小型车和新能源车以及各种微型自动驾驶平台的开发中本发明能简化了这些,将制动和驻车合二为一,摒弃了机械式制动,采用了电控液压推杆传动,简化了制动驻车的操作,且有利于实现汽车的轻量化,提高组装效率。人工驾驶所用的制动和驻车是分开操作的,既先完成制动,当车静止时再进行驻车制动,这种制动是呈线性实现的,对于乘坐人员的体验比较好,但这种传统的制动方式用于自动驾驶时就体现出了其缺点,特别是无人驾驶的物流车或售卖车时,因为车上无人,所以我们就不需要考虑人的体验,只考虑制动的快速性和安全性。
技术实现要素:
3.本发明目的在于提供一种应用于自动驾驶的电控式制动驻车一体系统,以解决上述背景技术中提出的人工驾驶所用的制动和驻车是分开操作的,既先完成制动,当车静止时再进行驻车制动,这种制动是呈线性实现的,对于乘坐人员的体验比较好,但这种传统的制动方式用于自动驾驶时就体现出了其缺点,特别是无人驾驶的物流车或售卖车时,因为车上无人,所以我们就不需要考虑人的体验的问题。
4.一种应用于自动驾驶的电控式制动驻车一体系统,包括有
5.接收刹车驻车指令,雷达系统监测到前进方向上有障碍物,或远程控制系统接收到刹车驻车命令后,命令传送至电动车中控;
6.轮毂电机扭矩反方向转动,接收到刹车驻车指令后,轮毂电机扭矩反向;
7.刹车片制动,刹车缸液压系统启动后,液压缸启动,推动液压油进入到制动卡钳,推动刹车片对轮毂制动。
8.作为本发明的一个实施例,所述雷达系统监测到前进方向上有障碍物,包括有;
9.启动雷达监测器;
10.探测小车前进方向上半径五米内存在障碍物;
11.判断小车与障碍物距离,将结果反馈到电动车中控;
12.当距离小于五米后,雷达系统中报警器启动。
13.作为本发明的一个实施例,所述雷达系统中报警器启动包括有
14.当电动车距离障碍物3.5m~5m,报警器发出声音;
15.当电动车距离障碍物3.5m~1.5m,报警器随距离拉近,声音响度也越高。
16.作为本发明的一个实施例,所述轮毂电机扭矩反方向转动,包括有
17.当电动车距离障碍物3.5m~5m,轮毂电机扭矩逐渐在减少;
18.当电动车距离障碍物3.5m~1.5m,轮毂电机提供反方向扭矩,且随着距离逐渐拉近,扭矩也逐渐增大;
19.当轮毂电机转速停下后,扭矩也不再提供,轮毂电机与电池箱断开。
20.作为本发明的一个实施例,所述电动车包括有
21.电动车本体;
22.前轮,所述前轮设置有刹车盘;
23.后轮,所述后轮连接有轮毂电机;
24.雷达监测模块,所述雷达监测模块设置于电动车本体前端,用于对电动车前进方向障碍物检测;
25.中控模块,所述中控模块与雷达监测模块电连接,中控模块与轮毂电机电连接,中控模块与刹车盘电连接。
26.作为本发明的一个实施例,所述刹车盘包括
27.刹车盘本体;
28.刹车片,所述刹车片与轮毂固定连接;
29.液压缸,所述液压缸与刹车盘连接;
30.液压缸驱动模块,所述液压缸驱动模块与中控模块电连接,所述液压缸驱动模块驱动液压缸工作,推动刹车盘本体与刹车片摩擦,对前轮制动。
31.本发明有益效果为:本发明装置简化了制动和驻车的步骤,该功能在无人驾驶领域非常实用,提高了安全性当雷达系统检测到人或障碍物时,通过vcu中智能芯片的预设程序下达指令,车辆接收到刹车驻车指令后,轮毂电机扭矩反转,使车辆减速至1.5km/h,推动刹车片,使车辆减速到零,实现驻车。同时电子信号会让刹车缸液压系统工作推油,推动刹车片实现快速制动,未解除信号时刹车片会一直刹住轮子从而达到驻车的效果。
附图说明
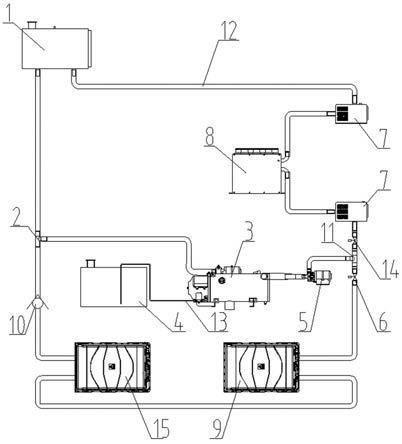
32.图1为本发明所述的刹车驻车控制图。
具体实施方式
33.为使本公开的目的、技术方案和优点更加清楚明白,以下结合具体实施例,对本公开进一步详细说明。
34.需要说明的是,除非另外定义,本说明书一个或多个实施例使用的技术术语或者科学术语应当为本公开所属领域内具有一般技能的人士所理解的通常意义。本说明书一个或多个实施例中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。“包括”或者“包含”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
35.一种应用于自动驾驶的电控式制动驻车一体系统,包括有
36.接收刹车驻车指令,雷达系统监测到前进方向上有障碍物,或远程控制系统接收到刹车驻车命令后,命令传送至电动车中控;
37.轮毂电机扭矩反方向转动,接收到刹车驻车指令后,轮毂电机扭矩反向;
38.刹车片制动,刹车缸液压系统启动后,液压缸气动,推动液压油进入到刹车盘,推动刹车片对轮毂止动。
39.随着汽车产业的发展,自动驾驶对制动的安全和快速越来越重视,集成化和小型化的制动结构也在不断改进,现有的汽车,尤其是电动汽车大多采用的都是传统的机械式系统,结构复杂,安装时对空间布局有要求。在小型车和新能源车以及各种微型自动驾驶平台的开发中本发明能简化了这些,将制动和驻车合二为一,摒弃了机械式制动,采用了电控液压推杆传动,简化了制动驻车的操作,且有利于实现汽车的轻量化,提高组装效率。人工驾驶所用的制动和驻车是分开操作的,既先完成制动,当车静止时再进行驻车制动,这种制动是呈线性实现的,对于乘坐人员的体验比较好,但这种传统的制动方式用于自动驾驶时就体现出了其缺点,特别是无人驾驶的物流车或售卖车时,因为车上无人,所以我们就不需要考虑人的体验,只考虑制动的快速性和安全性。当雷达系统检测到人或障碍物时,通过vcu中智能芯片的预设程序下达指令,车辆接收到刹车驻车指令后,轮毂电机扭矩反转,使车辆减速至1.5km/h,推动刹车片,使车辆减速到零,实现驻车。同时电子信号会让刹车缸液压系统工作推油,推动刹车片实现快速制动,未解除信号时刹车片会一直刹住轮子从而达到驻车的效果。
40.所述雷达系统监测到前进方向上有障碍物,包括有;
41.启动雷达监测器;
42.探测小车前进方向上半径五米内存在障碍物;
43.判断小车与障碍物距离,将结果反馈到电动车中控;
44.当距离小于五米后,雷达系统中报警器启动。
45.所述雷达系统中报警器启动包括有
46.当电动车距离障碍物3.5m~5m,报警器发出声音;
47.当电动车距离障碍物3.5m~1.5m,报警器随距离拉近,声音响度也越高。
48.所述轮毂电机扭矩反方向转动,包括有
49.当电动车距离障碍物3.5m~5m,轮毂电机扭矩逐渐在减少;
50.当电动车距离障碍物3.5m~1.5m,轮毂电机提供反方向扭矩,且随着距离逐渐拉近,扭矩也逐渐增大;
51.当轮毂电机转速停下后,扭矩也不再提供,轮毂电机与电池箱断开。
52.所述电动车包括有
53.电动车本体;
54.前轮,所述前轮设置有刹车盘;
55.后轮,所述后轮连接有轮毂电机;
56.雷达监测模块,所述雷达监测模块设置于电动车本体前端,用于对电动车前进方向障碍物检测;
57.中控模块,所述中控模块与雷达监测模块电连接,中控模块与轮毂电机电连接,中控模块与刹车盘电连接。
58.所述刹车盘包括
59.刹车盘本体;
60.刹车片,所述刹车片与轮毂固定连接;
61.液压缸,所述液压缸与刹车盘连接;
62.液压缸驱动模块,所述液压缸驱动模块与中控模块电连接,所述液压缸驱动模块驱动液压缸工作,推动刹车盘本体与刹车片摩擦,对前轮制动。
63.本说明书一个或多个实施例旨在涵盖落入所附权利要求的宽泛范围之内的所有这样的替换、修改和变型。因此,凡在本说明书一个或多个实施例的精神和原则之内,所做的任何省略、修改、等同替换、改进等,均应包含在本公开的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。