1.本实用新型涉及自动清洁领域,尤其涉及一种移动清扫装置。
背景技术:
2.现在自动清扫车的使用量越来越大,专利cn110037617a提供了一种垃圾清扫车辆,这种清扫车辆通过最前端圆柱状滚刷的转动来实现清洁,但是这种清扫车辆在使用过程圆柱状滚刷相对于地面的高度是无法调节的,所以这种清洁车不能根据使用的需求来随时调整滚刷距离地面的高度,其清洁适应性较差。
技术实现要素:
3.本实用新型针对上述问题,提出了一种移动清扫装置。
4.本实用新型采取的技术方案如下:
5.一种移动清扫装置,包括移动车、滚刷、支架及伸缩动力件,所述滚刷转动安装在支架上,所述支架滑动安装在所述移动车上,所述伸缩动力件设置于支架及移动车之间,所述伸缩动力件通过自身的伸缩带动所述支架在移动车上滑动。
6.本装置中将支架滑动安装在了移动车上,并且支架与移动车之间设置了伸缩动力件,利用伸缩动力件自身的伸缩来带动支架在移动车上位置的改变滚刷的位置,从而实现滚刷相对于地面高度的调节。
7.可选的,还包括滑块及滑轨,所述支架通过所述滑块及滑轨滑动安装在所述移动车上,所述伸缩动力件一端固定在所述移动车上,所述伸缩动力件另一端抵住所述支架。
8.具体伸缩动力件可以是电缸,也可以是气缸,也可以是液压缸,以电缸为例,电缸的不动端固定在移动车上,电缸的缸杆与支架上的连接框板配合在一起或者固定在一起。滑轨滑块的存在可以保证支架稳定地在移动车上发生上下移动。
9.还包括柔性吸纳体及抽真空件,所述柔性吸纳体固定设置在滚刷一侧,所述柔性吸纳体上设置有吸纳腔,所述抽真空件与所述吸纳腔相接,所述抽真空件用于对吸纳腔进行抽真空。
10.本装置中通过设置柔性吸纳体以及抽真空件,利用抽真空件使得吸纳腔内形成了真空状态,事的地面上的污水可以通过被吸进收纳腔内并且被抽真空件吸走,实现了一边清洗地面一边吸取地面污水的功能。
11.可选的,还包括污水箱,所述污水箱固定设置在柔性吸纳体一侧,所述污水箱与所述吸纳腔连通,所述抽真空件与所述污水箱相接。
12.设置污水箱的作用有两个,一个是存放清洗后的污水,另一个作用是形成了两个独立且连通的真空腔体,其中一个真空腔体为污水箱,通过两个真空腔体来抽取地面的污水,一则可以保证对地面的污水具有良好的吸取效率,二则两个真空腔可以保证抽真空过程中不会出现倒吸的现象,三则对抽真空电机起到保护作用,避免了抽真空电机出现转轴颤。
13.可选的,所述抽真空件为抽真空电机。
14.为了保证抽真空电机对污水箱的抽真空效率,可以进一步在污水箱与抽真空电机之间设置干燥结构,通过干燥结构阻止水汽进入抽真空电机内,具体干燥结构可以是一团带生石灰的棉花团,也可以是一台干燥器。
15.可选的,还包括毛刷及转动架,所述毛刷通过所述转动架可调节地固定安装在所述支架上,所述毛刷与所述柔性吸纳体分别位于所述滚刷的两侧。
16.具体支架包括连接杆及安装端板,滚刷安装在转动端板上,而加装杆安装在连接杆上。转动架也是安装在安装端板上。
17.设置毛刷的作用一则是扫除地面上的落叶、树枝等物体,二则是铲松地面上的附着物,便于滚刷清洗时快速地清除地面上的附着物。采取转动架安装是为了便于改变毛刷的安装高度以及安装角度。
18.可选的,还包括喷头,所述喷头通过加装板固定在支架上,且所述喷头位于所述毛刷与滚刷之间。
19.设置喷头的作用如下,首先喷头设置在毛刷与滚刷之间,毛刷可以前进的时候扫除地面上的落叶以及树枝等垃圾,而滚刷的作用是清理地面上的附着物,所以在毛刷与滚刷之间设置喷头,利用喷头喷洒水,这样毛刷在扫除树枝等杂物后,喷头迅速将地面喷湿,然后滚刷在对湿润的地面进行滚压式清洗,这样可以迅速地清洗掉地面上的附着物,同时由于柔性吸纳体与喷头是分别位于滚刷的两侧的,所以喷头喷洒之后的水可以快速地柔性吸纳体吸走,确保整个地面的清洁。所以在毛刷与滚刷之间加装喷头可以大幅地提高清洗效率。
20.可选的,所述毛刷为平板状毛刷。
21.平板状的毛刷便于清洁地面上的树枝、落叶、废纸张等垃圾。
22.可选的,所述吸纳腔的长度大于滚刷的长度,所述毛刷的长度大于吸纳腔的长度。
23.具体三者的长度为毛刷最长,吸纳腔其次,滚刷的长度最短,因为毛刷是用来铲走地面的树枝等较大物体的,所以毛刷的长度最长,这样可以保证滚刷与柔性吸纳体前进的方向上不存在任何阻碍物。而吸纳腔的长度大于滚刷的长度可以保证地面上的污水会被吸纳干净,不会出现清洗污水残留。
24.可选的,还包括行走轮,所述行走轮安装在所述柔性吸纳体上,所述柔性吸纳体通过所述行走轮与地面接触。
25.在柔性吸纳体上安装行走轮,且利用所述行走轮与地面接触,这样可以提高柔性吸纳体在工作时的稳定性,因为柔性吸纳体在工作时是出于被抽真空的状态,若不与地面接触,则会存在较大的颤动,所以在柔性收纳体上设置行走轮,利用行走轮来支撑柔性吸纳体,这样可以保证柔性收纳体的稳定性,且便于移动。
26.可选的,所述柔性吸纳体包括底板及柔性板,所述柔性板与所述底板配合在一起形成了带开口的吸纳腔。
27.具体底板是一块硬质的板,而柔性板可以是橡胶板或者硅胶板,柔性板固定在底板上形成了一个带开口的吸纳腔,由于柔性板与地面接触,这样柔性板既能起到良好的贴紧吸附的作用,确保对地面污水的真空吸附效果。
28.可选的,还包括传感器,所述传感器设置在移动车上,所述传感器与所述移动车的
控制主机电连接。
29.车身安装传感器,用来检测机器人边界,传感器能够水平安装或者竖直安装,既可以适用于四周都是墙壁的工况,也可以适用于悬空平台,能够自动识别边界并自动转弯、掉头进行下一步清洗。
30.具体传感器可以超声传感器,也可以是红外传感器,传感器通过固定架安装在移动车上。
31.可选的,所述移动车为履带式移动车。
32.履带式移动车采用同步履带轮结构,通过性较强,履带轮可以通过张紧轮来实现张紧,编码器安装在编码轮上,编码器与移动车的控制主机电连接,能够实时采集两边履带轮的行走速度,更加精确的对移动车行走进行控制。
33.移动车行走姿态通过陀螺仪来实行监控,通过控制二个驱动轮的行走速度,可以调整移动车的位置姿态和行走路线,既够保证机器人直线运行,运动过程中实时纠偏,又可以让移动车按照程序规划好的路线自动行走。
34.本装置可以进入室外高空平台等人员小车进入困难场景,结构紧凑,喷水清洗效果好,能够实现全自动清洗的机器人。
35.本实用新型的有益效果是:将支架滑动安装在了移动车上,并且支架与移动车之间设置了伸缩动力件,利用伸缩动力件自身的伸缩来带动支架在移动车上位置的改变滚刷的位置,从而实现滚刷相对于地面高度的调节。
附图说明:
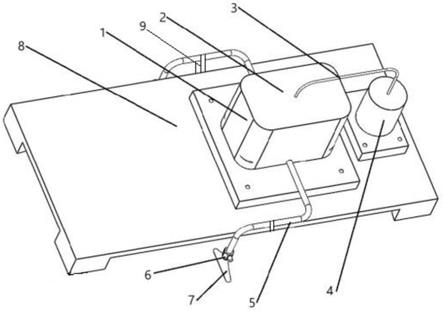
36.图1是移动清扫装置示意简图,
37.图2是滚刷与毛刷位置关系示意简图,
38.图3是支架与柔性收纳体配合结构示意简图,
39.图4是滚刷与支架的安装关系示意图。
40.图中各附图标记为:101、连接杆,102、滚刷,103、安装端板,104、刷轴,105、销轴,106、旋转电机,107、套管座,108、连接件,109、内套,201、抽真空件,202、污水箱,203、加装板,204、连接框板,205、毛刷,206、转动架,207、行走轮,208、柔性板,209、底板,2010、移动车,301、固定架,302、传感器,303、滑块,304、滑轨,305、伸缩动力件,306、控制主机。
具体实施方式:
41.下面结合各附图,对本实用新型做详细描述。
42.如附图1及附图2所示,一种移动清扫装置,包括移动车、滚刷、支架及伸缩动力件305,所述滚刷转动安装在支架上,所述支架滑动安装在所述移动车上,所述伸缩动力件305设置于支架及移动车之间,所述伸缩动力件305通过自身的伸缩带动所述支架在移动车上滑动。
43.本装置中将支架滑动安装在了移动车上,并且支架与移动车之间设置了伸缩动力件305,利用伸缩动力件305自身的伸缩来带动支架在移动车上位置的改变滚刷的位置,从而实现滚刷相对于地面高度的调节。
44.如附图1及附图2所示,还包括滑块303及滑轨304,所述支架通过所述滑块303及滑
轨304滑动安装在所述移动车上,所述伸缩动力件305 一端固定在所述移动车上,所述伸缩动力件305另一端抵住所述支架。
45.具体伸缩动力件305可以是电缸,也可以是气缸,也可以是液压缸,以电缸为例,电缸的不动端固定在移动车上,电缸的缸杆与支架上的连接框板配合在一起或者固定在一起。滑轨304滑块303的存在可以保证支架稳定地在移动车上发生上下移动。
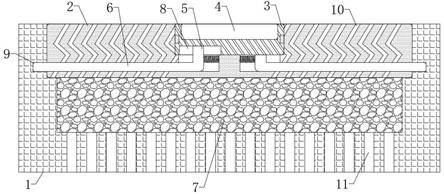
46.如附图1及附图2所示,一种滚刷清扫污水回收装置,包括支架及滚刷102,滚刷102转动安装在支架上,还包括柔性吸纳体及抽真空件201,柔性吸纳体固定设置在滚刷102一侧,柔性吸纳体上设置有吸纳腔,抽真空件201与吸纳腔相接,抽真空件201用于对吸纳腔进行抽真空。
47.本装置中通过设置柔性吸纳体以及抽真空件201,利用抽真空件201 使得吸纳腔内形成了真空状态,事的地面上的污水可以通过被吸进收纳腔内并且被抽真空件201吸走,实现了一边清洗地面一边吸取地面污水的功能。
48.如附图1、附图2及附图3所示,还包括污水箱202,污水箱202固定设置在柔性吸纳体一侧,污水箱202与吸纳腔连通,抽真空件201与污水箱202相接。
49.设置污水箱202的作用有两个,一个是存放清洗后的污水,另一个作用是形成了两个独立且连通的真空腔体,其中一个真空腔体为污水箱202,通过两个真空腔体来抽取地面的污水,一则可以保证对地面的污水具有良好的吸取效率,二则两个真空腔可以保证抽真空过程中不会出现倒吸的现象,三则对抽真空电机起到保护作用,避免了抽真空电机出现转轴颤。
50.如附图1、附图2及附图3所示,抽真空件201为抽真空电机。
51.为了保证抽真空电机对污水箱202的抽真空效率,可以进一步在污水箱202与抽真空电机之间设置干燥结构,通过干燥结构阻止水汽进入抽真空电机内,具体干燥结构可以是一团带生石灰的棉花团,也可以是一台干燥器。
52.具体如附图1所示,支架的连接杆101上固定有连接框板204,支架通过连接框板204安装在移动车2010上。污水箱202安装在移动车2010 上。具体污水箱202通过管道与柔性吸纳体上的吸纳腔连通。
53.如附图1、附图2及附图3所示,还包括毛刷205及转动架206,毛刷205通过转动架206可调节地固定安装在支架上,毛刷205与柔性吸纳体分别位于滚刷102的两侧。
54.具体支架包括连接杆101及安装端板103,滚刷102安装在转动端板上,而加装杆安装在连接杆101上。转动架206也是安装在安装端板103 上。
55.设置毛刷205的作用一则是扫除地面上的落叶、树枝等物体,二则是铲松地面上的附着物,便于滚刷102清洗时快速地清除地面上的附着物。采取转动架206安装是为了便于改变毛刷205的安装高度以及安装角度。
56.如附图1、附图2及附图3所示,还包括喷头,喷头通过加装板203 固定在支架上,且喷头位于毛刷205与滚刷102之间。
57.具体为了给喷头提供清水,可以在污水箱一侧加装一个清水箱,也可以将污水箱一份为二,一半用于存放污水,另一半用于存放清水。
58.需要说明的是喷头在附图中未示出,喷头的安装位置与位于加装板 203最右端的通孔处。
59.设置喷头的作用如下,首先喷头设置在毛刷205与滚刷102之间,毛刷205可以前进的时候扫除地面上的落叶以及树枝等垃圾,而滚刷102的作用是清理地面上的附着物,所以在毛刷205与滚刷102之间设置喷头,利用喷头喷洒水,这样毛刷205在扫除树枝等杂物后,喷头迅速将地面喷湿,然后滚刷102在对湿润的地面进行滚压式清洗,这样可以迅速地清洗掉地面上的附着物,同时由于柔性吸纳体与喷头是分别位于滚刷102的两侧的,所以喷头喷洒之后的水可以快速地柔性吸纳体吸走,确保整个地面的清洁。所以在毛刷205与滚刷102之间加装喷头可以大幅地提高清洗效率。
60.如附图1、附图2及附图3所示,毛刷205为平板状毛刷205。
61.平板状的毛刷205便于清洁地面上的树枝、落叶、废纸张等垃圾。
62.如附图1、附图2及附图3所示,吸纳腔的长度大于滚刷102的长度,毛刷205的长度大于吸纳腔的长度。
63.具体三者的长度为毛刷205最长,吸纳腔其次,滚刷102的长度最短,因为毛刷205是用来铲走地面的树枝等较大物体的,所以毛刷205的长度最长,这样可以保证滚刷102与柔性吸纳体前进的方向上不存在任何阻碍物。而吸纳腔的长度大于滚刷102的长度可以保证地面上的污水会被吸纳干净,不会出现清洗污水残留。
64.如附图1、附图2及附图3所示,还包括行走轮207,行走轮207安装在柔性吸纳体上,柔性吸纳体通过行走轮207与地面接触。
65.在柔性吸纳体上安装行走轮207,且利用行走轮207与地面接触,这样可以提高柔性吸纳体在工作时的稳定性,因为柔性吸纳体在工作时是出于被抽真空的状态,若不与地面接触,则会存在较大的颤动,所以在柔性收纳体上设置行走轮207,利用行走轮207来支撑柔性吸纳体,这样可以保证柔性收纳体的稳定性,且便于移动。
66.如附图1、附图2及附图3所示,柔性吸纳体包括底板209及柔性板 208,柔性板208与底板209配合在一起形成了带开口的吸纳腔。
67.具体底板209是一块硬质的板,而柔性板208可以是橡胶板或者硅胶板,柔性板208固定在底板209上形成了一个带开口的吸纳腔,由于柔性板208与地面接触,这样柔性板208既能起到良好的贴紧吸附的作用,确保对地面污水的真空吸附效果。
68.如附图2、附图3及附图4所示,滚刷102为圆柱状空心式滚刷102。
69.采用圆柱状空心式的滚刷102一则是为了降低整个装置的重量,二则是为了在滚刷102内安装用于驱动滚刷102转动的旋转电机,通过旋转电机驱动滚刷102转动,从而实现滚刷102转动时动力内置,从而有效提高滚刷102转动的稳定性与高效性。
70.滚刷的安装结构如附图4所示,滚刷102的两端分别与两个安装端板 103转动配合在一起,套管座107固定在安装端板上,且套管座107位于滚刷102内,旋转电机106安装在套管座107内;销轴105呈十字架状,旋转电机106通过销轴105与内套109配合在一起,内套109固定在滚刷 102内,销轴105与内套109配合在一起;连接件108与安装端板103固定在一起,套管座107固定在连接件108上,旋转电机106安装在套管座 107与连接件108形成的密闭空间内;滚刷102一端通过刷轴104与安装端板103转动配合在一起,滚刷102另一端与连接件108转动套设配合在一起。
71.如附图1及附图2所示,还包括传感器302,传感器302设置在移动车上,所述传感器302与所述移动车的控制主机305电连接。
72.车身安装传感器302,用来检测机器人边界,传感器302能够水平安装或者竖直安装,既可以适用于四周都是墙壁的工况,也可以适用于悬空平台,能够自动识别边界并自动转弯、掉头进行下一步清洗。
73.具体传感器302可以超声传感器302,也可以是红外传感器302,传感器302通过固定架301安装在移动车上。
74.如附图1及附图2所示,移动车2010为履带式移动车。
75.履带式移动车采用同步履带轮结构,通过性较强,履带轮可以通过张紧轮来实现张紧,编码器安装在编码轮上,编码器与移动车的控制主机305 电连接,能够实时采集两边履带轮的行走速度,更加精确的对移动车行走进行控制。
76.移动车行走姿态通过陀螺仪来实行监控,通过控制二个驱动轮的行走速度,可以调整移动车的位置姿态和行走路线,既够保证机器人直线运行,运动过程中实时纠偏,又可以让移动车按照程序规划好的路线自动行走。
77.本装置可以进入室外高空平台等人员小车进入困难场景,结构紧凑,喷水清洗效果好,能够实现全自动清洗的机器人。
78.本实施方式所提供的清扫装置具有如下优点
79.1.清洁部件采用滚刷和真空吸水方式,占用空间小,可以应用到户外无人清洁环境;
80.2.机器人清洗干净,污水回收效果好,清洗完没有污渍;
81.3.抽真空电机体积小,结构紧凑,吸水效果好;
82.4.滚刷前面增加毛刷,能够清扫固体垃圾;
83.5.滚刷、毛刷等清洁组件可上下移动,能够使用不同工况;
84.6.净水箱和污水箱拆装方便,方便更换和排污;
85.7.能够实现全自动化操作,无需人工干预。
86.以上所述仅为本实用新型的优选实施例,并非因此即限制本实用新型的专利保护范围,凡是运用本实用新型说明书所作的等效变换,直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。