技术特征:
1.一种用于对具有货物长度、货物宽度和货物高度的货物尺寸的货物进行物理测量的货物扫描装置,所述装置包括:扫描机器人,所述扫描机器人包括多个传感器,所述多个传感器以沿第一方向基本上跨越所述货物尺寸中的至少一个的阵列布置,其中,成阵列的传感器在扫描平面中沿第二方向一起移动,并且其中,所述多个传感器被配置成从所述扫描平面拍摄所述货物的图像,并且被配置成捕获关于所述货物距所述扫描平面的距离的距离信息。2.根据前一权利要求所述的货物扫描装置,其中,所述货物是原木货物,原木大体上彼此平行地布置成堆。3.根据前述权利要求中任一项所述的货物扫描装置,其中,所述多个传感器沿大体平行于所述货物长度的纵向方向沿着所述货物长度一起平移。4.根据前述权利要求中任一项所述的货物扫描装置,其中,所述多个传感器在第一取向和第二取向之间旋转以面向所述货物的相反面。5.根据前一权利要求所述的货物扫描装置,其中,所述多个传感器在所述第一取向和所述第二取向之间旋转180
°
,以面向所述原木货物的相反端。6.根据前述权利要求中任一项所述的货物扫描装置,其中,所述扫描机器人由水平间隔开的平行的两个轨道支撑。7.根据前一权利要求所述的货物扫描装置,其中,所述两个轨道被抬高并被支撑离开地面。8.根据权利要求1至5中任一项所述的货物扫描装置,其中,所述扫描机器人是具有驱动机构以将自身推向所述货物的移动扫描单元。9.根据前一权利要求所述的货物扫描装置,其中,所述移动扫描单元能够由操作员手动驱动,或者所述移动扫描单元的移动能够是自动化的。10.根据前一权利要求所述的货物扫描装置,其中,所述移动扫描单元能够检测所述货物并将自身与所述货物对准。11.根据前述权利要求中任一项所述的货物扫描装置,其中,所述原木扫描装置包括多个机器人单元。12.根据前一权利要求所述的货物扫描装置,其中,所述机器人单元中的一个或更多个用于执行以下任务中的一者或组合:a)扫描,b)标签原木,c)水流冲击,或d)贴标签。13.根据权利要求11至12中任一项所述的货物扫描装置,其中,所述多个机器人单元沿着相同的轨道定位。14.根据前述权利要求中任一项所述的货物扫描装置,其中,所述扫描机器人位于高架台架上。15.根据前述权利要求中任一项所述的扫描装置,其中,所述传感器是选自以下中的一者或更多者的测距成像相机:
a)立体相机,b)结构光相机,c)飞行时间相机,或d)拍摄偏移图像的单个相机。16.根据前述权利要求中任一项所述的货物扫描装置,其中,所述扫描机器人包括横构件,并且所述多个传感器固定在所述横构件上。17.根据前述权利要求中任一项所述的货物扫描装置,其中,所述成阵列的传感器沿所述第二方向一起平移,所述第二方向垂直于所述第一方向。18.根据前一权利要求所述的货物扫描装置,其中,所述横构件在所述扫描机器人上于升高位置和降低位置之间移动以扫描所述货物。19.根据权利要求1至16中任一项所述的货物扫描装置,其中,所述成阵列的传感器沿弧一起移动。20.根据权利要求2至19中任一项所述的货物扫描装置,其中,所述多个传感器大致跨越所述货物宽度以在不沿横向方向移动所述扫描机器人的情况下拍摄原木货物。21.根据权利要求16至20所述的货物扫描装置,其中,所述横构件具有大约30mm至500mm之间的宽度以配合在原木货物中的原木包之间的间隙中。22.根据前述权利要求中任一项所述的货物扫描装置,其中,所述多个传感器被定位成具有大致垂直于所述扫描平面的视线。23.根据前述权利要求中任一项所述的货物扫描装置,其中,所述多个传感器在升高位置和降低位置之间移动以从大致水平的视角拍摄图像。24.根据前述权利要求中任一项所述的货物扫描装置,其中,所述多个传感器沿纵向方向移动以拍摄俯视图像以形成沿着所述货物长度的图像集合。25.根据前述权利要求中任一项所述的货物扫描装置,其中,所述多个传感器以立体对布置。26.根据前一权利要求所述的货物扫描装置,其中,所述装置包括4至10个立体对。27.根据前述权利要求中任一项所述的货物扫描装置,其中,所述装置具有15米至50米的长度且至少跨越所述货物长度。28.根据前一权利要求所述的货物扫描装置,其中,所述装置具有20米至30米的长度且至少跨越所述货物长度。29.根据权利要求23至28所述的货物扫描装置,其中,所述多个传感器能够从所述升高位置降低2米至5米到所述降低位置,以扫描所述原木货物中的原木堆端部。30.根据前一权利要求所述的货物扫描装置,其中,所述多个传感器能够从所述升高位置降低3米至4米到所述降低位置,以扫描所述原木货物中的原木堆端部。31.根据前述权利要求中任一项所述的货物扫描装置,其中,所述扫描机器人包括对准传感器以确定所述扫描机器人何时在所述货物或相邻货物包之间的间隙上方。32.根据权利要求2至31中任一项所述的货物扫描装置,其中,所述装置还包括导轨,所述导轨被配置成将原木运输车辆引导至货物接纳架内适合扫描的位置。33.根据权利要求2至32中任一项所述的货物扫描装置,其中,所述装置还包括传感器用以确定原木运输车辆是否处于适合扫描的位置。
34.根据前述权利要求中任一项所述的货物扫描装置,其中,所述装置还包括指示器用以向原木运输车辆的驾驶员指示驾驶、减速或停止。35.一种用于对货物进行物理测量的系统或装置,包括:提供根据前述权利要求中任一项所述的货物扫描装置以拍摄图像集合,以及用于处理所述图像集合的处理器。36.根据前一权利要求所述的用于对货物进行物理测量的系统或装置,其中,所述处理器拼接由所述多个传感器拍摄的所述图像集合以生成所述货物的3d表示。37.根据权利要求35和36所述的用于对货物进行物理测量的系统或装置,其中,所述处理器根据所述图像集合生成所述货物的渲染的2d拼接图像或3d渲染。38.根据权利要求35至36中任一项所述的用于对货物进行物理测量的系统或装置,其中,所述处理器校正拼接输出中的视差/透视误差。39.根据权利要求35至38所述的用于对货物进行物理测量的系统或装置,其中,所述货物是原木货物,并且所述处理器处理由所述多个传感器拍摄的图像以确定单独的原木的物理特性。40.根据前一权利要求所述的系统或装置,其中,所述物理特性是以下中的一者或更多者:i.原木直径,ii.最小原木直径,iii.最大原木直径,iv.原木面积,v.原木周长,vi.可用原木周长,vii.可用原木面积,viii.原木缺陷,ix.所述原木的位置,x.可追溯性数据。41.根据权利要求36至40所述的用于对货物进行物理测量的系统或装置,其中,所述货物扫描装置测量距离数据和/或原木识别数据。42.根据前一权利要求所述的用于对货物进行物理测量的系统或装置,其中,所述距离数据是相机位置和原木面之间的距离。43.根据权利要求36至42所述的用于对货物进行物理测量的系统或装置,其中,所述处理器将所述图像中的像素的数目换算成单独的原木的物理测量结果。44.根据权利要求36至43所述的用于对货物进行物理测量的系统或装置,其中,所述处理器处理由所述多个传感器拍摄的图像以确定原木货物的木材体积。45.根据前一权利要求所述的用于对货物进行物理测量的系统或装置,其中,所述木材体积根据从所述货物的渲染的2d拼接图像或3d图像、距离数据和机器人位置数据确定的物理特性来确定。46.根据权利要求36至45所述的用于对货物进行物理测量的系统,还包括被配置成存储数据的存储器。
47.一种用于对货物进行物理测量的方法,包括:提供根据权利要求1至34所述的货物扫描装置,将货物定位在所述货物扫描装置的货物接纳架中,使成阵列的传感器一起移动,以及拍摄所述货物的图像集合以确定物理测量结果。48.根据前一权利要求所述的用于对货物进行物理测量的方法,其中,所述货物是原木货物,原木大体上彼此平行地布置成堆。49.根据权利要求47和48所述的用于对货物进行物理测量的方法,其中,所述成阵列的传感器从升高位置一起移动到降低位置。50.根据权利要求47和48所述的用于对货物进行物理测量的方法,其中,所述成阵列的传感器沿水平方向从所述货物的一侧一起移动到所述货物的另一侧。51.根据权利要求47和48所述的用于对货物进行物理测量的方法,其中,所述成阵列的传感器从竖向取向沿弧一起移动到水平取向或从水平取向沿弧一起移动到竖向取向。52.根据权利要求47至51所述的用于对货物进行物理测量的方法,还包括使所述扫描机器人沿所述货物的纵向方向沿着所述货物长度移动。53.根据权利要求48至52所述的用于对货物进行物理测量的方法,还包括在使所述成阵列的传感器移动到原木包之间的间隙中之前检测所述原木包之间的间隙。54.根据权利要求48至53所述的用于对货物进行物理测量的方法,其中,图像由所述多个传感器在基本上垂直于原木端部的水平面上拍摄。55.根据权利要求48至54所述的用于对货物进行物理测量的方法,还包括使所述多个传感器旋转成面向所述原木货物。56.根据权利要求47至55所述的用于对原木进行物理测量的方法,其中,所述成阵列的传感器以步进增量平移。57.根据前一权利要求所述的用于对原木进行物理测量的方法,其中,在每个步进增量处,由所述成阵列的传感器在移动到下一步进增量之前拍摄一系列图像。58.根据权利要求47至55所述的用于对原木进行物理测量的方法,其中,所述成阵列的传感器不中止地平移。59.根据权利要求47至58所述的用于对原木进行物理测量的方法,还包括拼接由所述多个传感器拍摄的图像集合以形成所述货物的3d表示。60.根据权利要求47至59所述的用于对货物进行物理测量的方法,还包括根据所述图像集合形成所述货物的渲染的2d拼接图像。61.根据权利要求47至60所述的用于对货物进行物理测量的方法,还包括处理由所述多个传感器拍摄的图像以确定以下中的一者或更多者:i.原木直径,ii.最小原木直径,iii.最大原木直径,iv.原木面积,v.原木周长,vi.可用原木周长,
vii.可用原木面积,viii.原木缺陷,ix.所述原木的位置,x.可追溯性数据。62.根据权利要求48至61所述的用于对货物进行物理测量的方法,其中,所述货物扫描装置获得距离数据和/或原木识别数据。63.根据前一权利要求所述的用于对货物进行物理测量的方法,其中,所述距离数据是相机位置和原木面之间的距离。64.根据权利要求48至63所述的用于对货物进行物理测量的方法,还包括处理由所述多个传感器拍摄的图像以确定原木货物的可用木材的体积。65.根据前一权利要求所述的用于对原木货物进行物理测量的系统或装置,其中,所述木材的体积根据从所述货物的渲染的2d拼接图像或3d图像、距离数据和机器人位置数据确定的物理特性来确定。66.根据权利要求48至65所述的用于对货物进行物理测量的方法,其中,所述原木货物由原木运输车辆驱动到所述货物接纳架中,并且测量在所述原木货物保留在所述车辆上时进行。67.根据权利要求48至66所述的用于对原木进行物理测量的方法,还包括从所述图像自动检测和读取原木上的qr码。
技术总结
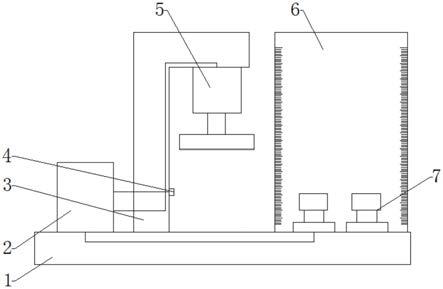
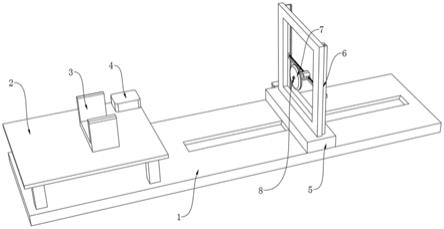
一种用于对货物进行物理测量的货物扫描装置。该货物扫描装置具有扫描机器人,该扫描机器人包括多个传感器,多个传感器以沿第一方向基本上跨越至少一个货物尺寸的阵列布置。成阵列的传感器在扫描平面中沿第二方向一起移动。多个传感器被配置成从扫描平面拍摄货物的图像,并且被配置成捕获关于所述货物距扫描平面的距离的距离信息。面的距离的距离信息。面的距离的距离信息。
技术研发人员:F
受保护的技术使用者:机器人普拉斯有限公司
技术研发日:2020.01.24
技术公布日:2021/11/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。