1.本发明涉及地震资料处理技术领域,特别是涉及到一种地震数据炮检距向量片快速划分方法
背景技术:
2.在处理宽方位地震资料时,一些关键处理流程(如数据规则化和叠前时间偏移)通常需要在ovt(offset vector tile,炮检距向量片)域或cov(common offsetvector,共炮检距向量)域中完成。目前,尽管部分商业化地震数据处理软件(如schlumberger公司的omega以及bgp公司的geoeast等)提供了ovt划分模块,但都对其方法的实现细节严格保密。鲜见的划分ovt方法的专著和论文都是基于十字排列的划分方法,而且都是针对非细分面元观测系统的资料,并且都无法解决由不同观测系统资料拼接带来的ovt划分难题。
3.在申请号:201910445521.0的中国专利申请中,涉及到一种海上宽方位地震数据cov道集快速分选方法。该方法通过全工区的炮线文件s、接收线文件r和炮-检关系文件x计算出全工区的十字排列交点坐标,再用2倍的炮线间距和2倍的检波线间距划分cov分组(即ovt分组)。该方法存在如下问题:
①
只适用于非细分面元的观测系统的ovt划分,直接用2倍的炮线间距和2倍的检波线间距划分ovt分组时会产生错误,其分组数远远超过观测系统覆盖次数;
②
无法划分不同观测系统拼接资料的ovt分组,因为不同观测系统的十字排列交点坐标不同,炮线间距和检波线间距也不尽相同,另外,当不同观测系统的网格方向不同时,该方法显然无法建立统一的十字排列划分不同方向的ovt分组。
4.为此我们发明了一种新的炮检距向量片快速划分方法,解决了以上技术问题。
技术实现要素:
5.本发明提供了一种地震数据炮检距向量片快速划分方法,该方法无需抽取十字排列,通过在直角坐标系中将炮检距向量分解成水平分量和垂直分量来划分炮检距向量片。通过分析计算观测系统的炮点、检波点、炮线、检波线的关系确定炮检距向量片分组的水平和垂直间距。当有多个观测系统的资料进行拼接处理时,统一按主区块观测系统进行ovt划分即可。为实现上述目的,本发明采取以下技术方案:一种炮检距向量片划分方法,包括以下步骤:1)建立直角坐标系,固定水平方向横坐标x平行于炮线,固定垂直方向纵坐标y平行于检波线方向;
6.2)计算理论观测系统采集模板中所有炮点到每条检波线的炮检距向量横向分量dx;
7.3)计算炮检距向量横向分组号sx,计炮点距与检波线距最小公倍数的2倍为gx,则炮检距向量横向分组组号为:sx=[dx/gx] 1(dx>0时,式中中括号表示取整),sx=[dx/gx]-1(dx<0时,式中中括号表示取整),注意当采集模板中最远的两个炮点距离大于检波线距时,最大的横向炮检距dxmax强制分入前一组,即sxmax=[dxmax/gx](注意dxmax与sxmax有正负号,式中中括号表示取整);
[0008]
4)计算观测系统采集模板中炮点到每个检波点的炮检距向量纵向分量dy;
[0009]
5)计算炮检距向量纵向分组号sy,计炮线距与检波点距最小公倍数的2倍为gy,则炮检距向量纵向分组组号为:sy=[dy/gy] 1(dy>0时,式中中括号表示取整),sy=[dy/gy]-1(dy<0时,式中中括号表示取整),计最大纵向炮检距dymax对应的分组号为symax(注意dymax与symax有正负号);
[0010]
6)计算实际资料中每道数据的炮检距向量的横向分量dx;
[0011]
7)按步骤3计算横向分组组号,当横向炮检距dx=0时可强制横向分组号sx=1,当横向炮检距dx大于理论观测系统最大的横向炮检距dxmax时,可强制横向分组号sx等于最大理论分组号sxmax(注意dx、dxmax与sxmax有正负号,其符号相同,大小是指绝对值);
[0012]
8)计算实际资料中每道数据的炮检距向量的纵向分量dy;
[0013]
9)按步骤5计算纵向分组组号,当纵向炮检距dy=0时可强制纵向分组号sy=1,当纵向炮检距dy大于理论观测系统最大的纵向炮检距dymax时,可强制纵向分组号sy等于最大理论分组号symax(注意dy、dymax与symax有正负号,其符号相同,大小是指绝对值)。
[0014]
本发明由于采取以上技术方案,其具有以下优点:1、只需要计算炮检距的纵、横向分量,根据炮线距、检波线距、炮点距和检波线距进行ovt分组,不需要抽取十字排列,计算速度更快;2、能够适应炮道缺失和补线,以及接收线和炮线偏离预设位置等变观情况;3、固定主区块观测系统参数后,不同观系统的拼接资料直接按主区块的参数进行ovt分组;4、能够同时适应细分面元和非细分面元观测系统,划分非细分面元观测系统时,其横向分组间距炮点距与检波线距最小公倍数的2倍等同于2倍的检波线距,其纵向分组间距炮线距与检波点距最小公倍数的2倍等同于2倍的炮线距。
[0015]
附图、附表说明
[0016]
图1为本发明实施例的观测系统采集模板;
[0017]
图2为本发明实施例的观测系统采集模板中所有的炮检距向量及其分组;
[0018]
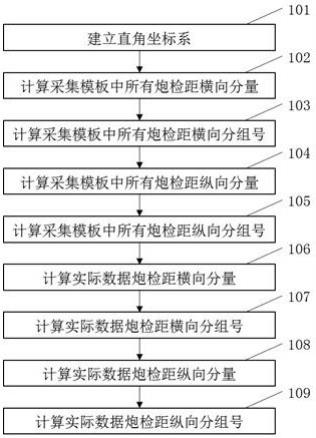
图3为本发明的地震数据炮检距向量片快速划分方法的一具体实施例的流程图。
具体实施方式
[0019]
以下将结合附图对本发明的较佳实施例进行详细说明,以便更清楚理解本发明的目的、特点和优点。应理解的是,附图所示的实施例并不是对本发明范围的限制,而只是为了说明本发明技术方案的实质精神。
[0020]
下面以某油田采集的地震资料ovt划分为例,该资料为横向细分面元的采集观测系统(接收线距不能整除炮点距的采集观测系统),其观测系统主要参数如表1所示,其观测系统采集模板如图1所示。图2为本发明实施例的观测系统采集模板中所有的炮检距向量及其分组。
[0021]
表1观测系统参数表
[0022][0023][0024]
如图3所示,图3为本发明的地震数据炮检距向量片快速划分方法的流程图。
[0025]
步骤101,建立直角坐标系,固定水平方向横坐标x平行于炮线,固定垂直方向纵坐标y平行于检波线方向,固定坐标原点位于观测系统采集模板中的第1条检波线上的第一个检波点。固定坐标系后,则炮检点坐标如下:第i条检波线上第j个检波点横坐标为125
×
(i-1)(其中i=1,2,3,
……
,40),纵坐标为25
×
(j-1)(其中j=1,2,3,
……
,240),第k个炮点坐标为(2287.5 50
×
k,2987.5)(其中k=1,2,3,4,5)。
[0026]
步骤102,计算观测系统采集模板中所有炮检距横向分量,即所有炮点到每条检波线的横向距离dx。
[0027]
第k个炮点到第i条检波线上第j个检波点的炮检距向量横向分量dx
i,j,k
=125
×
(i-1)-(2287.5 50
×
k)。其中两个最大分量为dx
1,j,5
=-2537.5,dx
40,j,1
=2537.5。
[0028]
步骤103,计算观测系统采集模板中所有的炮检距向量横向分组号sx。
[0029]
炮点距50m,检波线距125m,它们的最小公倍数为250m,则gx=500m。第k个炮点到第i条检波线上第j个检波点的炮检距向量横向分组号为sx
i,j,k
=[dxi,j,k/500] 1(dx>0时,式中中括号表示取整),sx=[dx
i,j,k
/500]-1(dx<0时,式中中括号表示取整)。由于第1个
炮点到第5个炮点距离为200m,大于检波线距125m,所以最大的两个dx被强制分组,dx
1,j,5
的组号sx
1,j,5
=-5,dx
40,j,1
的组号sx
40,j,1
=5,sx的值域范围为[-5,5]且不包含0的整数。
[0030]
步骤104,计算观测系统采集模板中所有炮检距纵向分量,即炮点到每个检波点的炮检距向量纵向分量dy。
[0031]
第k个炮点到第i条检波线上第j个检波点的炮检距向量纵向分量dy
i,j,k
=25
×
(j-1)-2987.5。
[0032]
步骤105,计算观测系统采集模板中所有的炮检距向量纵向分组号sy。
[0033]
炮线距150m,检波点距25m,它们的最小公倍数为150m,则gy=300m。第k个炮点到第i条检波线上第j个检波点的炮检距向量纵向分组号为sy
i,j,k
=[dy
i,j,k
/300] 1(dy>0时,式中中括号表示取整),sy=[dy
i,j,k
/300]-1(dy<0时,式中中括号表示取整)。sy的值域范围为[-10,10]且不包含0的整数。
[0034]
观测系统采集模板中所有的纵、横向分组号及炮检距分量如表2所示。注意横向第5组,炮检距绝对值范围为2012.5m至2537.5m,范围比前4组要大。
[0035]
表2观测系统采集模板中所有的炮检距向量及其分组表
[0036]
[0037][0038]
观测系统采集模板中所有的炮检距向量划分结果如图2所示,图中色标为炮检距绝对值,网格线为纵、横向ovt分组界线,其中横向10组,纵向20组,与观测系统覆盖次数相同。
[0039]
步骤106,计算实际资料中每道数据的炮检距向量的横向分量dx。
[0040]
步骤107,按步骤103计算实际资料中每道数据的横向分组组号,当横向炮检距dx=0时强制
[0041]
sx=1,当dx>2537.5m时强制sx=5,当dx<-2537.5m时强制sx=-5。
[0042]
步骤108,计算实际资料中每道数据的炮检距向量的纵向分量dy。
[0043]
步骤109,按步骤105计算实际资料中每道数据的纵向分组组号,当纵向炮检距dy=0时强制
[0044]
sy=1,当dy>2987.5时强制sy=10,当dy<-2987.5m时强制sy=-10。
[0045]
上述实施例仅用于说明本发明,其中直角坐标系的定位方式以及各步骤计算方式等都是可以有所变化的,凡是在本发明技术方案的基础上进行的等同变换和改进,均不应排除在本发明的保护范围之外。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。