1.本发明涉及等曲率柔性机械臂,特别涉及可变杆长的等曲率柔性机械臂。
背景技术:
2.柔性机械臂具有灵活度高、避障能力强等优点,在狭小的空间和复杂环境中运动和操作能力强,在航空航天制造、大型装备检测维护等领域具有重要的应用价值。目前,柔性机械臂主要有两类,一类是在每段臂杆关节连接处均设置独立驱动;另一类则是等曲率联动机构。其中,等曲率联动机构,其将机械臂整体分割为几个大的单元,对每个单元进行驱动,单元内部由联动机构实现两个正交转轴解耦的等曲率运动,如中国专利cn109773769b中公开的一种基于球销副的柔性机械臂;然而,每个单元臂段的长度对整臂的工作空间和灵活性影响较大,通常每个单元臂段长度大可以带来更大的工作空间,但是同时会导致在狭小空间中运动不灵活,通用性不强。
技术实现要素:
3.本发明旨在提供一种能够兼顾大工作空间和小工作空间,且运动灵活的可变杆长的等曲率柔性机械臂。
4.本发明所述的一种可变杆长的等曲率柔性机械臂,包括多个单元臂段,相邻单元臂段通过联动绳连接并等曲率运动;每个单元臂段包括第一臂杆段及第二臂杆段,所述第一臂杆段与第二臂杆段通过球销副连接为一体;而相邻单元臂段,则其中一个单元臂段中的第二臂杆段与另一个单元臂段中的第一臂杆段通过滑移副连接为一体。
5.在其中一个单元臂段中的第二臂杆段与另一个单元臂段中的第一臂杆段之间还设置有带动滑移副复位的弹性复位件。
6.在相邻单元臂段之间还设置有限制滑移副运动距离以及确保各单元臂段等曲率运动的连杆组件。
7.本发明所述的一种可变杆长的等曲率柔性机械臂,在驱动绳以及联动绳的共同作用下,多个单元臂段可以实现等曲率运动;由于每个单元臂段中的第一臂杆段和第二臂杆段通过球销副连接,因而可实现柔性机械臂整体在x和y轴两个方向上的转动自由度;而由于相邻单元臂段,其中一个单元臂段中的第二臂杆段与另一个单元臂段中的第一臂杆段通过滑移副连接为一体,因而可实现相邻单元臂段在其轴向(即z轴方向)产生相对移动,从而实现柔性机械臂的整体伸缩,即实现了柔性机械臂的可变杆长,以使等曲率柔性机械臂能够兼顾大工作空间和小工作空间,且运动灵活。
8.而在设置有滑移副的第二臂杆段和第一臂杆段之间设置有带动滑移副复位的弹性复位件,即可带动滑移副复位,使身长的等曲率柔性机械臂缩短复位。
9.此外,在相邻单元臂段之间还设置有限制滑移副运动距离以及确保各单元臂段等曲率运动的连杆组件,则可有效避免滑移副移动距离过大且可确保在等曲率柔性机械臂变换杆长的过程中,各单元臂段仍可实现等曲率运动。
附图说明
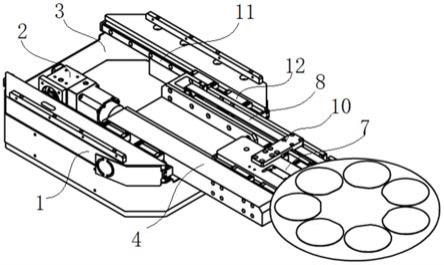
10.图1为本发明实施例结构示意图。
11.图2为本发明实施例单个单元臂段分解示意图。
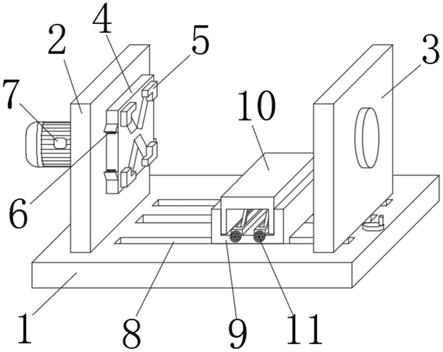
12.图3为本发明实施例滑移副结构示意图。
13.图4为本发明实施例滑移副实现变杆长的机构简图。
具体实施方式
14.下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
15.一种可变杆长的等曲率柔性机械臂,如图1至图4所示,包括多个单元臂段1,相邻单元臂段1通过联动绳2连接并等曲率运动;每个单元臂段1包括第一臂杆段11及第二臂杆段12,所述第一臂杆段11与第二臂杆段12通过球销副连接为一体;而相邻单元臂段1,则其中一个单元臂段1中的第二臂杆段12与另一个单元臂段1中的第一臂杆11段通过滑移副连接为一体,且在其中一个单元臂段1中的第二臂杆段12与另一个单元臂段1中的第一臂杆段11之间还设置有带动滑移副复位的弹性复位件3;在相邻单元臂段1之间还设置有限制滑移副运动距离以及确保各单元臂段等曲率运动的连杆组件。在驱动绳4以及联动绳的共同作用下,多个单元臂段可以实现等曲率运动(其通过驱动绳驱动单元臂段运动的工作过程可以参考中国专利cn109773769b);由于每个单元臂段中的第一臂杆段和第二臂杆段通过球销副连接,因而可实现柔性机械臂整体在x和y轴两个方向上的转动自由度;而由于相邻单元臂段,其中一个单元臂段中的第二臂杆段与另一个单元臂段中的第一臂杆段通过滑移副连接为一体,因而可实现相邻单元臂段在其轴向(即z轴方向)产生相对移动,从而实现柔性机械臂的整体伸缩,即实现了柔性机械臂的可变杆长,以使等曲率柔性机械臂能够兼顾大工作空间和小工作空间,且运动灵活,而在设置有滑移副的第二臂杆段和第一臂杆段之间设置有带动滑移副复位的弹性复位件,即可带动滑移副复位,使身长的等曲率柔性机械臂缩短复位;此外,在相邻单元臂段之间还设置有限制滑移副运动距离以及确保各单元臂段等曲率运动的连杆组件,则可有效避免滑移副移动距离过大且可确保在等曲率柔性机械臂变换杆长的过程中,各单元臂段仍可实现等曲率运动。
16.所述滑移副包括在第一臂杆段11的自由端上设置的可容纳第二臂杆段12自由端的槽体,相邻单元臂段1,其中一个单元臂段1的第二臂杆段12的自由端可移动地插入另一个单元臂段1的第一臂杆段11自由端上的槽体内以形成滑移副,且在第二臂杆12段伸入到第一臂杆段11的槽体中的部分上设置有可转动地圆盘13,在圆盘13上套设有杆长调节牵引绳14,排在首位的单元臂段1的杆长调节牵引绳14由其第二臂杆段12内部穿过后再由其第一臂杆段11内部穿出,而在后的每一个单元臂段1的杆长调节牵引绳14的一端部均尤其本身第二臂杆段12及第一臂杆段11内部穿过后伸入到前一单元臂段1的第二臂杆段12中,并与前一单元臂段1中的圆盘13连接。在需要拉长等曲率柔性机械臂的整体长度时,通过拉动排在首位的单元臂段上的杆长调节牵引绳,则可带动对应的第二臂杆段朝同方向移动,由于在后的每一个单元臂段的杆长调节牵引绳的一端部均尤其本身第二臂杆段及第一臂杆段内部穿过后伸入到前一单元臂段的第二臂杆段中,并与前一单元臂段中的圆盘连接,因
而即可带动在后的各单元臂段中的第二臂杆段沿相同方向移动,此时因受连杆组件的影响,在后的每个单元臂段中的第一臂杆段均朝与第二臂杆段运动方向相反的方向运动,从而实现等曲率柔性机械臂的身长;在等曲率柔性机械臂身长的同时,弹性复位件受力拉伸变形,在松开杆长调节牵引绳后,在弹性复位件的作用下,滑移副随弹性复位件回复,即可实现等曲率柔性机械臂的缩短。
17.所述连杆组件包括在第二臂杆段12上按环形阵列间隔设置的四根导杆5,在导杆5上设置有可相对导杆5滑动的滑块51,在滑块51上铰接有连杆52,后一个单元臂段1上的其中两根对称设置的连杆52的自由端铰接在前一单元臂1段的第二臂杆段12上,而另外两根对称设置的连杆52的自由端铰接在后一单元臂段1的第一臂杆段11上,使相邻两个单元臂段1之间的多根连杆形成x形。需注意的是,由于排在首位的单元臂段的前端是空位,而排在末位的单元臂段的后方也是空位,因而其四根导杆上只需在其中两个相对设置的导杆上设置滑块即可,相应的,也只需要在这两个滑块上设置连杆。在等曲率柔性机械臂被拉伸时,通过相邻的第二臂杆段与第一臂杆段的相对移动,可实现连杆的摆动,从而连杆带动滑块朝心部运动,以实现等曲率柔性机械臂的整体拉伸;相反的,在松开杆长调节牵引绳后,在弹性复位件的弹性复位作用下,随着相邻的第二臂杆段与第一臂杆段的相对移动,又可以使连杆带动滑块沿远离心部的方向移动,从而实现等曲率柔性机械臂的整体缩张。同时,由于相邻两个单元臂段之间的多根连杆形成x形,可限制相邻的第二臂杆段与第一臂杆段的相对移动的距离,同时还可以确保柔性机械臂可以等曲率运动。
18.相邻单元臂段1之间通过多根联动绳2连接,联动绳2一端连接在前一单元臂段1的第一臂杆段11上,另一端则依次穿过前一单元臂段1上的导杆5上的长条孔53、前一单元臂段1的第二臂杆段12上的条形孔121、后一单元臂段1的第一臂杆段11上的端部开口槽111、后一单元臂段1上的导杆5上的长条孔53后连接至后一单元臂段1的第二臂杆段12上,且联动绳2在穿过导杆5上的长条孔53时与对应导杆5上的滑块51的弧形面511相切。由于联动绳需要穿过前一单元臂段的第二臂杆段上的条形孔以及后一单元臂段的第一臂杆段上的端部开口槽,因而其穿过的两根导杆必然呈反向设置,从而可使相邻单元臂段之间的多根联动绳呈交叉设置。通过设置联动绳,可确保相邻单元臂段之间呈等角度的反向联动。此外,由于滑块上设置由弧形面,而联动绳与滑块上的弧形面相切,可实现等曲率柔性机械臂在x轴转动和y轴转动之间的运动解耦。
19.所述球销副包括设置在第一臂杆段11上的球头112,以及设置在第二臂杆段12上的球形槽122,所述球头112伸入到球形槽122内,在球形槽122的侧壁上开设有两个对称设置的腰型孔123,其中两根导杆5穿过腰型孔123后连接至球头112上,而另外两根导杆5则连接在球形槽122的侧壁上;相邻单元臂段1的球形槽122上的两个腰型孔123的连线相互垂直。由于相邻单元臂段的球形槽上的两个腰型孔的连线相互垂直,因而可使部分单元臂段绕x轴运动,部分单元臂段绕y轴运动,从而可确保等曲率柔性机械臂整体在y轴和x轴方向都可以运动。需注意的是,排在首位的单元臂段可以无需摆动,因而其球形槽上无需设置腰型孔。
20.所述弹性复位件3为弹簧,弹簧的一端连接在前一单元臂段1的第二臂杆段12上,另一端则连接在后一单元臂段1的第一臂杆段11上。
21.以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定
本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。