1.本发明涉及压电发电领域的一种风力发电装置,准确的说是一种利用风能气流为微电子设备进行供能的驰振式压电能量收集装置。
背景技术:
2.自然界某些电介质在沿一定方向上受到外力的作用而变形时,其内部会产生极化现象,同时在它的两个相对表面上出现正负相反的电荷。当外力去掉后,它又会恢复到不带电的状态,这种现象称为正压电效应。在实际应用当中可以利用具有压电效应的晶片物质将环境当中的机械能转化为微电能。
3.美国克莱蒙森大学的研究人员(masana ravindra and daqaq mohammed f..electromechanical modeling and nonlinear analysis of axially loaded energy harvesters[j].journal of vibration and acoustics,2011,133(1))研究了轴向预压对悬臂梁软化和加强的影响。其设计的能量接收器由一端夹紧的薄钢梁及其上表面的压电片组成。悬臂梁系统的一端产生一个初始轴向位移。研究表明,轴向预压可以用于调整、增加电阻尼和放大外部激励的效果。英国剑桥大学的研究人员(jia,yu,seshia,ashwin a..power optimization by mass tuning for mems piezoelectric cantilever vibration energy harvesting[j].journal of microelectromechanical systems:a joint ieee and asme publication on microstructures,microactuators,microsensors,and microsystems,2016,25(1):108
‑
117.doi:10.1109/jmems.2015.2496346.)发现在微悬臂梁自由端附近加入质量块可以显着提高振动能量收集器每单位加速度的功率响应能力。然而,质量块的容纳是以牺牲有源压电区域为代价的。通过数值和实验研究了该折衷方案,并探索了功率最大化的最佳质量与悬臂长度比,发现占悬臂总长度约60%
‑
70%的端部质量在线性响应中是最佳的,并且它们明显优于具有40%和50%端部质量的类似悬臂。
[0004]
驰振是由于流动分离和漩涡脱落而产生的空气动力负阻尼分量,导致细长结构失稳式的振动。驰振式压电风能气流能量收集装置主要由支架、压电悬臂梁和阻流体构成。两根尺寸相同的压电悬臂梁平行放置,一端通过螺栓、夹片与支架固定连接,另一端是自由端通过螺栓与方形柱体的阻流体固定连接。该收集器的工作原理是:当风气流载荷作用于阻流体,风速超过一个临界值时,阻流体在绕流作用下,受到空气动力而发生横向驰振,带动压电悬臂梁一起振动,使压电元件产生应变,从而由压电效应将振动能转换为电能。
[0005]
由于驰振式压电风能气流能量收集装置的输出功率会受到压电悬臂梁的固有频率,阻流体尺寸和输入风速等一系列的因素的影响。且能量收集装置在输入的机械振动的频率与压电悬臂梁的固有频率越近,输出功率越高。因此控制压电悬臂梁的固有频率是一项十分重要的工作。
技术实现要素:
[0006]
为了解决背景技术中存在的问题,本发明主要是提供一种利用驰振原理的压电风能气流能量收集装置。
[0007]
为了实现上述目的,本发明所采用的技术方案是:
[0008]
本发明包括压电悬臂梁单元、风压检测单元、底板、外壳、悬臂梁旋转单元和悬臂梁伸缩单元;压电悬臂梁单元的后端安装风压检测单元,在底板的上方安装了外壳,底板和外壳之间形成安装内腔,压电悬臂梁单元后端均和悬臂梁旋转单元和悬臂梁伸缩单元连接,悬臂梁旋转单元和悬臂梁伸缩单元安装连接在底板上。
[0009]
所述的悬臂梁旋转单元包括空心立柱、横梁空心柱、大齿轮、小齿轮;压电悬臂梁后端套装在横梁空心柱中,横梁空心柱水平布置,空心立柱竖直布置,空心立柱上端和横梁空心柱固接;底板上安装有大齿轮和小齿轮,大齿轮和小齿轮相啮合连接,空心立柱下端和大齿轮之间通过键进行同轴旋转连接,大齿轮与小齿轮之间啮合,小齿轮与第一舵机输出轴同轴固接;所述的悬臂梁伸缩单元包括第一连杆、第二连杆、第三连杆和第二舵机;第二连杆活动同轴套装在空心立柱中,第二连杆包括第二连杆上半部分与第二连杆下半部分,第二连杆上半部分下端与第二连杆下半部分上端同轴可旋转地连接,第一连杆上端穿入横梁空心柱后与压电悬臂梁后端铰接,第一连杆下端穿入穿出空心立柱后与第二连杆上半部分上端连接,第二连杆下半部分下端穿出空心立柱后和第三连杆的一端滑动铰接,第三连杆另一端和第二舵机的输出端固接,第二舵机与底板固定连接。
[0010]
所述的第一连杆上端穿过横梁空心柱底面的水平条形槽后铰接到压电悬臂梁后端,第一连杆下端穿过空心立柱侧壁的竖直条形槽后铰接到第二连杆上半部分上端,使得压电悬臂梁后端和第二连杆上半部分上端之间通过横梁空心柱、第一连杆、空心立柱和形成连杆滑动结构。
[0011]
所述的第二连杆下半部分下端和滑块筒铰接,第三连杆一端活动穿过滑块筒。
[0012]
所述的第三连杆主要由位于一端的阻块和位于另一端的方孔组成,阻块外径大于滑块筒的内径,方孔主要与第二舵机上的舵机轴的方轴进行套装配合。
[0013]
所述的压电悬臂梁由阻流体、金属悬臂梁、尾部圆柱组成,所述的阻流体呈圆筒状,阻流体和金属悬臂梁前端固接,金属悬臂梁后端和尾部圆柱前端固接,尾部圆柱穿设套装于横梁空心柱中,尾部圆柱后端穿出横梁空心柱的两侧固定设有风压检测单元基座,风压检测单元基座上用于安装风压检测单元,尾部圆柱后端穿出横梁空心柱的底面固定设有铰接耳座,铰接耳座用于铰接第一连杆的上端;金属悬臂梁上下表面均贴有压电膜,压电膜通过导线与外部的储能装置连接。
[0014]
所述的压电悬臂梁后端的风压检测单元基座穿出横梁空心柱后的端部安装连接风压检测单元,风压检测单元主要由检测板与检测板下的压力传感器组成。
[0015]
本发明有两个运动自由度,一个是舵机控制一对直齿轮,大齿轮连接着连接悬臂梁的空心立柱,从而实现对悬臂梁朝向的控制。另外一个采用了连杆机构,利用舵机控制连杆,使得与连杆上滑块连接的连杆能够在空心立柱的内部上下移动,同时这种上下移动可以使压电悬臂梁产生前后移动的效果。空心立柱的后侧也设置了一个开口,方便连杆伸出与压电悬臂梁进行连接。其中空心立柱内部的连杆分为上下两部分,上面部分和下面部分可以旋转,因此当压电悬臂梁的朝向发生改变时,舵机也能够控制悬臂梁的长度。
[0016]
由于该风力压电能量收集装置能够改变压电悬臂梁的长度,利用这种效果,可以改变悬臂梁的固有频率,从而使得压电悬臂梁的固有频率能够与风输入的频率保持一致。这是由于压电悬臂梁在发电的过程当中进行的是受迫振动,悬臂梁的振动频率会是风输入的振动频率的整数倍,因此只要使压电悬臂梁的输入频率与输入频率一致,就能够一定程度上保持最大的输出功率。
[0017]
本发明的有益效果是:
[0018]
本发明具有机械结构可调节的功能和作用,具有能够带动气流发电元件的位置和姿态调整到最大发电效率的功能。
[0019]
本发明这种装置可以测量流体风向的同时控制压电悬臂梁的朝向,也能够测量得到风速并利用风速数据来改变压电悬臂梁的固有频率,实现输出功率最大化。
附图说明
[0020]
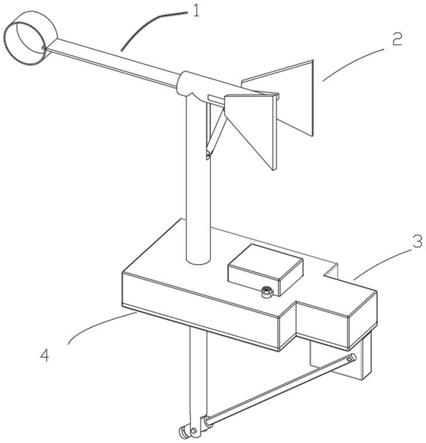
图1为本发明实施例中的立体结构示意图;
[0021]
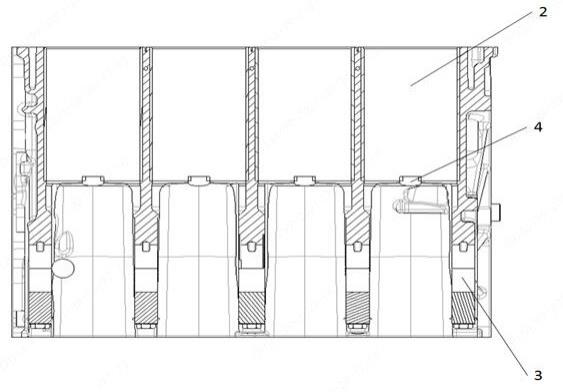
图2为本发明实施例中的悬臂梁伸缩单元示意图;
[0022]
图3为本发明实施例中的悬臂梁旋转单元示意图;
[0023]
图4为本发明实施例当中的第一连杆结构示意图;
[0024]
图5为本发明实施例当中的压电悬臂梁示意图;
[0025]
图6为本发明实施例当中的第二连杆结构示意图;
[0026]
图7为本发明实施例当中的第三连杆的结构示意图;
[0027]
图8为本发明实施例当中的空心立柱的示意图。
[0028]
图中:压电悬臂梁单元1、风压检测单元2、底板4、外壳3、第一连杆5、第二连杆上半部分6、第二连杆下半部分7、滑块筒8、第三连杆9、第二舵机10、螺柱11、键12、孔13、孔14、孔15、空心立柱16、第一舵机17、大齿轮18、小齿轮19、圆筒状阻流体20,金属悬臂梁21,尾部圆柱22,风压检测单元基座23,铰接耳座24、铰接耳座25、铰接耳座26、铰接耳座27、孔28、轴29、铰接耳座30、阻块31、方孔32、槽33、水平条形槽34、竖直条形槽35、横梁空心柱36、键槽37、孔38。
具体实施方式
[0029]
以下结合实施例及其附图对本发明作进一步说明。
[0030]
参见图1,装置包括压电悬臂梁单元1、风压检测单元2、底板4、外壳3、悬臂梁旋转单元和悬臂梁伸缩单元;
[0031]
压电悬臂梁单元1的后端安装风压检测单元2,在底板4的上方安装了外壳3,底板4和外壳3之间形成安装内腔,底板4和外壳3之间的连接也主要通过螺钉穿过孔13与外壳3上的螺孔进行配合,外壳3的主要作用是保护底板4上方的零件不受外部的环境影响。压电悬臂梁单元1后端均和悬臂梁旋转单元和悬臂梁伸缩单元连接,悬臂梁旋转单元和悬臂梁伸缩单元安装连接在底板4上。
[0032]
通过悬臂梁旋转单元带动压电悬臂梁单元1旋转,通过悬臂梁伸缩单元带动压电悬臂梁单元1伸缩运动。
[0033]
悬臂梁伸缩单元主体安装在底板的下方,主要通过控制连杆机构来实现压电悬臂
梁单元的移动。悬臂梁转向单元主体安装在底板的上方,控制压电悬臂梁单元的转向的同时不会影响到悬臂梁的前后伸缩的问题。风压检测单元安装在压电悬臂梁单元的后方,利用两侧检测到的压力的数值判断流体风向和风速。
[0034]
参见图3,悬臂梁旋转单元主要由齿轮传动结构组成,包括空心立柱16、横梁空心柱36、大齿轮18、小齿轮19;压电悬臂梁1后端套装在横梁空心柱36中,参见图8,横梁空心柱36水平布置,空心立柱16竖直布置,横梁空心柱36和空心立柱16相垂直布置,均内部中空且不互连通。空心立柱16上端和横梁空心柱36固接;底板4上安装有大齿轮18和小齿轮19,大齿轮18和小齿轮19相啮合连接,空心立柱16下端和大齿轮18之间通过键12进行同轴旋转连接,大齿轮18与小齿轮19之间啮合,小齿轮19与第一舵机17输出轴同轴固接;底板4上开设有孔14,小齿轮19的轴套装孔14中形成铰接安装。
[0035]
第一舵机17运行带动小齿轮19转动,大齿轮18会进行相反方向的转动,进而同轴带动空心立柱16进行转动,进而经横梁空心柱36传递带动压电悬臂梁1旋转,使得压电悬臂梁1能够转向合适的方向。
[0036]
参见图2,悬臂梁伸缩单元包括第一连杆5、第二连杆、第三连杆9和第二舵机10;第二连杆活动同轴套装在空心立柱16中,第二连杆同时也穿过底板4的孔15,第二连杆包括第二连杆上半部分6与第二连杆下半部分7,第二连杆上半部分6与第二连杆下半部分7均套装在空心立柱16中,第二连杆上半部分6下端与第二连杆下半部分7上端同轴可旋转地连接,压电悬臂梁1旋转时,带动第二连杆上半部分6相对于第二连杆下半部分7旋转,但第二连杆上半部分6下端与第二连杆下半部分7同轴上下同步升降运动。
[0037]
参见图6,第二连杆主要由第二连杆的上半部分6与第二连杆的下半部分7组成,其中第二连杆的上半部分6的铰接耳座27主要与第一连杆的铰接耳座26配合,孔28部分主要由两个直径不一的孔组成,其中深处的孔直径更大。该孔主要与第二连杆的下半部分7的轴29配合,轴29上方直径更大的轴主要作用为与孔28配合的同时,不会在第二连杆上下移动的同时发生脱节的情况,同时在空心立柱16进行旋转时,第二连杆也能够正常工作。为了方便装配,轴29这一部分主要由柔性材料组成。第二连杆的下半部分7的铰接耳座30与滑块筒8进行配合,使得第三连杆9在旋转时,第二连杆能够在空心立柱16内部进行上下移动。
[0038]
第一连杆5上端穿入横梁空心柱36后与压电悬臂梁1后端铰接,第一连杆5下端穿入穿出空心立柱16后与空心立柱16内部的第二连杆上半部分6上端连接,这样第二连杆在空心立柱16中的上下移动运动通过第一连杆5传递到压电悬臂梁1上;第二连杆下半部分7下端穿出空心立柱16后和第三连杆9的一端滑动铰接,第三连杆9另一端和第二舵机10的输出端固接,第二舵机10通过螺柱11与底板4底面固定连接。
[0039]
第一连杆5上端穿过横梁空心柱36底面的水平条形槽34后铰接到压电悬臂梁1后端,第一连杆5下端穿过空心立柱16侧壁的竖直条形槽35后铰接到第二连杆上半部分6上端,使得压电悬臂梁1后端和第二连杆上半部分6上端之间通过横梁空心柱36、第一连杆5、空心立柱16和形成连杆滑动结构,这样使得第一连杆5插装在空心立柱16和横梁空心柱36之间,压电悬臂梁1后端和第二连杆上半部分6上端之间通过第一连杆5铰接连接。
[0040]
具体实施参见图5,第一连杆5主要有两个铰接耳座,分别为上铰接耳座25和下铰接耳座26,其中上铰接耳座25与压电悬臂梁1的铰接耳座24配合,下铰接耳座26主要与第二连杆的上半部分6的铰接耳座27进行配合。主要作用是将第二连杆的上下移动的运动转化
为压电悬臂梁1的前后移动。
[0041]
第二连杆下半部分7下端和滑块筒8铰接,第三连杆9一端活动穿过滑块筒8,从而使得第二连杆下半部分7下端和第三连杆9的一端滑动铰接。
[0042]
第二舵机10控制第三连杆9进行转动,通过滑块筒8带动第二连杆在空心立柱16内部上下升降移动,经第一连杆5传递带动压电悬臂梁1在横梁空心柱36中水平移动:
[0043]
当第二舵机10进行逆时针转动时,带动第三连杆9连接滑块筒8的一端下移,进而带动第二连杆在空心立柱16内部下降移动,经第一连杆5拉动压电悬臂梁1的后端向前移动,使得压电悬臂梁1从横梁空心柱36向前伸出,压电悬臂梁1的有效长度增加;
[0044]
当第二舵机10进行顺时针转动时,带动第三连杆9连接滑块筒8的一端上移,进而带动第二连杆在空心立柱16内部上升移动,经第一连杆5拉动压电悬臂梁1的后端向后移动,使得压电悬臂梁1从横梁空心柱36向后缩回,压电悬臂梁1的有效长度减小。
[0045]
悬臂梁伸缩单元主要由连杆机构组成,连杆机构会受到空心立柱16和底板4等零件的约束,且当空心立柱16进行旋转运动时,该连杆机构一样能够正常工作。
[0046]
压电悬臂梁1的有效长度为从横梁空心柱36伸出的长度。
[0047]
参见图7,第三连杆9主要由位于一端的阻块31和位于另一端的方孔32组成,阻块31外径大于滑块筒8的内径,阻块31的主要作用时防止第三连杆9在旋转时连杆上的滑块筒8会脱离;方孔32主要与第二舵机10上的舵机轴的方轴进行套装配合,使得舵机轴在旋转时不容易出现打滑的现象。
[0048]
参见图4,压电悬臂梁1由阻流体20、金属悬臂梁21、尾部圆柱22组成,阻流体20呈圆筒状,阻流体20和金属悬臂梁21前端固接,金属悬臂梁21后端和尾部圆柱22前端固接,尾部圆柱22穿设套装于横梁空心柱36中,尾部圆柱22后端穿出横梁空心柱36的两侧固定设有风压检测单元基座23,风压检测单元基座23上用于安装风压检测单元2,尾部圆柱22后端穿出横梁空心柱36的底面固定设有铰接耳座24,铰接耳座24用于铰接第一连杆5的上端;金属悬臂梁21上下表面均贴有压电膜,压电膜通过导线与外部的储能装置连接。通过金属悬臂梁21的振动带动压电膜变形,进而将机械能转变为电能输出到储能装置。
[0049]
阻流体20设计为圆筒状,使得阻流体主要与流动的空气形成涡激振动效应,使得压电悬臂梁的振幅能够更大。
[0050]
金属悬臂梁21为薄片状结构,悬臂梁的上侧和下侧都贴有ptz
‑
5a的压电膜,这两片压电膜通过导线与储能装置连接,同时两片压电膜依靠金属悬臂梁形成串联的形式。
[0051]
尾部圆柱22能够与横梁空心柱36形成配合,使得压电悬臂梁1能够在连杆机构的控制下前后移动。铰接耳座24能够与第一连杆5当中的铰接耳座25利用铰轴进行配合。
[0052]
如图8所示,压电悬臂梁1的尾部圆柱22能够穿过横梁空心柱36并在内部滑动。横梁空心柱36两侧对称设有水平条状的槽33,槽33的主要作用为使得压电悬臂梁的风压检测单元基座23能够在压电悬臂梁1前后移动时不会被横向部分的侧面阻挡。横梁空心柱36底面设有水平条形槽34,水平条形槽34使得铰接耳座24在压电悬臂梁1前后移动时不会被横向部分的底面阻挡。
[0053]
空心立柱16上端侧壁开设有竖直条形槽35,竖直条形槽35的作用是方便第一连杆5能够伸出空心立柱16与压电悬臂梁1的铰接耳槽24配合;空心立柱16底端的孔38为纵向部分的孔,该孔使得第二连杆能够在空心立柱16内上下移动。空心立柱16底端设有键槽37,键
槽37为键12的键槽,通过键槽37和键12将安装键12与大齿轮18进行同轴配合安装。
[0054]
压电悬臂梁1后端的风压检测单元基座23穿出横梁空心柱36后的端部安装连接风压检测单元2,风压检测单元2主要由检测板与检测板下的压力传感器组成。
[0055]
当风吹到检测板上时,检测板会受到压力,压力传感器会检测该压力,并将该数据传递到控制中枢当中。
[0056]
如图3、图8所示,悬臂梁旋转单元主要由舵机控制齿轮组对空心立柱16进行控制,空心立柱16的转动可以控制压电悬臂梁1的朝向。当第一舵机17控制小齿轮19进行转动时,大齿轮18会进行相反方向的转动,带动空心立柱16进行转动,使得压电悬臂梁1能够转向合适的方向。
[0057]
风吹过圆筒状阻流体20产生振动,进而带动金属悬臂梁21及其上的压电膜上下往复周期性振动形变,将振动形变的机械能转变为电能进行发电。
[0058]
金属悬臂梁21伸出横梁空心柱36的长度和金属悬臂梁21的振幅关联,风速也和金属悬臂梁21的振幅关联。在一定风速下,金属悬臂梁21伸出横梁空心柱36的长度和风速匹配,实现金属悬臂梁21的振幅最大,金属悬臂梁21的振动形变跟风速形成共振关系。
[0059]
本发明通过悬臂梁旋转单元和悬臂梁伸缩单元在一定风速下,调整圆筒状阻流体20朝向更好的风速方向,且调整金属悬臂梁21伸出横梁空心柱36的长度,能够使得金属悬臂梁21的振幅最大,金属悬臂梁21的振动形变跟风速形成共振关系,达到最大发电效率。
[0060]
参见图1至图8,悬臂梁转向装置不仅能够实现自由控制悬臂梁的朝向,还能够实现悬臂梁朝向的固定。悬臂梁伸缩单元能够改变悬臂梁的长度,从而改变悬臂梁的固有频率,使得风气流吹过阻流体之后产生的机械振动的频率能够和悬臂梁的固有频率保持一致,形成共振。
[0061]
而风压检测单元可以检测压电悬臂梁两侧的风速,当两侧风速压力不同时说明压电悬臂梁与风速的方向不一致。以风压高的检测器的表面指向风压低的一侧为方向,压电悬臂梁以该方向进行旋转,当两侧的风压数值相同时,说明悬臂梁与流体风向一致,这个时候测得的风速就是实际风速。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。